PMSM 磁场定向控制设计
2016-12-12 03:07:42潘云蛟
舰船科学技术 2016年11期
黄 斌,潘云蛟
(昆明船舶设备研究试验中心,云南 昆明 650010)
PMSM 磁场定向控制设计
黄 斌,潘云蛟
(昆明船舶设备研究试验中心,云南 昆明 650010)
本文通过研究电机的驱动控制原理,建立仿真模型,分析和相应实验说明,本文设计的控制策略可行。同时利用一种新方法寻找电机的初始角度和计算电机转速,实验结果表明该方案在水下航行体中具有启动快和调速性能好。
永磁同步电动机;矢量控制;双闭环系统
0 引 言
UUV 推进电机在前几年由于电子元器件的发展不成熟,影响了控制的精度,多采用直流电机,而直流电机在结构上有换向器和电刷,该部分使得电机的结构庞大,电机使用时影响整个控制系统效率低。随着电子元器件的发展成熟,控制算法也同样发展,使得永磁同步电机替代直流电机作为动力输入成为了一种趋势[1]。目前还没有人把这种和永磁同步电机结合的控制方法运用在水下航行体中,这一领域只是进行算法的理论研究,考虑电机的效率由电机本身的结构设计和控制器的控制算法所影响,所以需要注意2个方面:一是如何确定电机的结构设计达到了最优;二是设计出的电机需要和相应的控制器进行合理的匹配,以使整个驱动系统总的效率最大[2]。
1 系统控制策略
本文不以电机的结构设计为主,重点关注控制算法的实现。永磁同步电机控制系统由 TMS320F 28335作为主控部分,选用 IPM 为主驱动模块,光电隔离电路部分,电流检测和信号处理电路,保护电路构成。软件算法程序通过 CCS 实现,TMS320F28335 控制芯片是目前已经使用比较成熟的2812芯片的升级。
2 PMSM 驱动系统控制策略实现
在 Matlab 2010a 中建立 Foc 控制系统(磁场定向控制)的 simulink 仿真模型,对控制算法的可能性进行验证,在算法得到验证的基础上再进行代码部分的编写。
从图1可看出,该控制系统采用双闭环控制,给定的参考转速是900rpm;速度通过 PI 调节模块,实现转速的闭环控制策略,该调节采用输出限幅。接电流 PI 调节器模块构成电流的闭环控制,输出定子的电压 dq 轴分量 ud和 uq;I-park 逆变器模块将两相旋转直角坐标系(dq)下的值向两相静止坐标系(αβ)下变化,它的输出是 αβ 轴的定子电压分量参考值 Uα和 Uβ;SVPWM 和逆变模块用于实现参考电压逆变及其调
制,从而可以直接通给电机;PMSM 是永磁同步电机模块,负载转矩是模块 Tm。反馈通道模块为:Clark变换模块:实现三相坐标系(ABC)向两相静止坐标系(αβ)的转换,Parke 变换模块:把两相静止坐标系(αβ)向两相旋转坐标系转换(dq),从而实现复杂电机参数的解耦。所谓的磁场定向控制就是把电机的三相电流转换为相互垂直的电流,而使其中一个电流为 0[3]。这样通过控制另一个电流而控制电机的转矩,用传统直流电机的方法来控制交流电机,使得控制方法简单。
永磁同步电机中的相电流值呈现正弦波,所以相应的控制系统要求相电流也是正弦波,通过 SVPWM来控制逆变器的6个功率管开合和关闭进而达到变频的目的。相应的构成模块有:扇区判断、XYZ 计算、基本矢量时间分配、赋值模块及 PWM 波形产生(见图 2)。
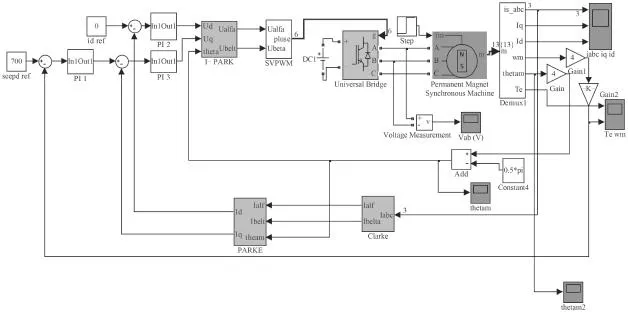
图1 调速系统图Fig.1Speed control system diagram

图2 SVPWM 模块仿真图Fig.2Simulation diagram of SVPWM module
SVPWM 模块通过 Ipark 变化输出值 Ua,Uβ对逆变桥的6个功率管进行导通或者关闭来使得永磁同步电机的定子合成磁场与转子磁场相互作用[4]。
PID 模块的结构如图3所示:PID 控制器工作机制是对闭环控制中误差信号进行响应,尝试对控制量进行调节,从而获得期望的系统响应。被控参数可以是任何可测量系统量,本系统中的被控参数是转速 id和 iq值[5],而实际使用时,由于考虑系统的相应速度在比例
和积分参数介入的情况下已经满足要求,所以设计微分参数为 0。
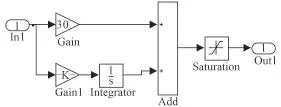
图3 PI 控制算法原理结构图Fig.3Structure chart of conventional digital PI control algorithm
3 系统软件设计
通过辅助工具 ccs3.3,采用 c 代码编写控制程序,软件计时和总体框图如图4所示。
电动机控制的中断子程序是利用 ePWM1 作为中断源,时基是由一个 PWM 下溢中断的等待环(TBCTR = 0x0000 时产生事件),当定时器达到预设定时就会向CPU 提出中断请求[6],当 CPU 响应中断时,对永磁同步电机控制的一系列程序就会执行[7]。在此程序中采用以速度环为外环、电流环为内环的双闭环控制系统,对电流和速度进行控制[8],其软件流程如图5所示。
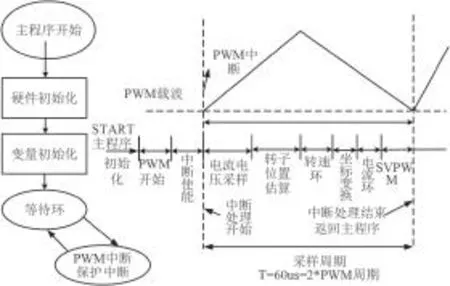
图4 软件总体流程图及计时时序Fig.4Flow chart of software design and timing order
解决的几个重要难点如下:
1)在 SVPWM 算法中把电机划分成6个扇区,并在算法中给了1个参数 n,通过参数 n 就能知道电机合成磁场所在的扇区(见图 6)。参数 n 与扇区之间的关系见表 1。
用手去旋转电机,会发现参数的变化是 3,1,5,4,6,2 依次重复,可以对应 U3,U1,U5,U4,U6,U2。当电机在各种扇区时,会出现相应的比较值 Ta,Tb,Tc大于该比较值输出高电平,然后通过此来判断相应矢量的作用长度。动作输出高电平还是低电平由AQCTLA 寄存器相应位来决定相应动作。在控制系统中取 7500 为计数器的最大值,TBCLK=2×7500 × 1/150 μs= 100 μs,f =10kHz,其中 150 是 dsp 的频率 PWM 波形采用递增与递减格式,10 μs 是 isr 这个中断进入的时间[9]。

图5 软件流程图(TMS320F281X 系列)Fig.5Software flowchart(TMS320F281x series)
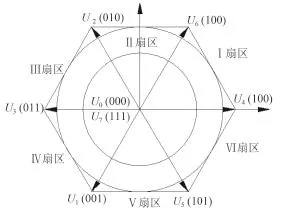
图6 基本空间电压矢量图Fig.6Basic voltage space vector

表1 SVPWM 计算的参数 n 与扇区关系Tab.1relationship between n and sector in SVPWM

式中:T1为 pwm.periodmax;T 为周期,10 μs;f=10 kHz 为时钟频率。

式中 T2为 SYSTEM_FREQUENCY 寄存器时间,用的是系统寄存器计时时间,当计数到 0 时,发生中断进入,时间是按照 150 ×5000/150 μs =5000 μs,约为 0.005 s时间。
2)电机初始角度即寻找电角度
如果多次实验证明电机的初始角度有问题,电机就无法平稳运行。控制系统采用12位的旋变,精度为1/4 096 = 0.000 244 140 6。由此可知该精度完全可以达到推进系统的要求。360° 对应4096,一个周期是6个sector,19 对极电机1个电气周期对应的编码器是360/19 = 18.947°,属于一个扇区 18.947/6 = 3.157 89°,对应的编码器是 360°/4 096 × 3.157 89 = 36。电机的初始角度在 36 个编码器数值内变动,即:19 对极,1 个电气周期占的机械角 360/19 = 18.95,1 个 sector 占3.157 89°,对应12bit 为 36。机械角度是 P1–P0,P1是旋变反馈的当前位置数,P0是初始角度对应的编码,360° 对应4096 输出,令 X = (P1– P0)/4 096,P3是电机当前编码器输出值,P4是初始编码器输出值,电角度取得值是标幺值,P 是电角度的值,本电机是 19对极,由于电角度是机械角度的19倍,19 对极电机的电气角度为:
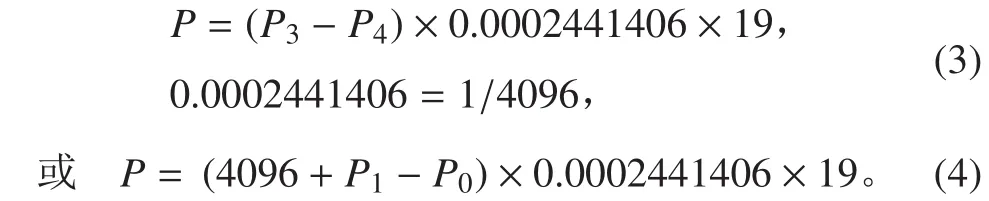
式(3)是电机正传时的值,式(4)是电机反转时的采样计算值。
电机初始角的确定方法,在 SVPWMISR(void)中断函数中设置:

这样设定以后,给磁场一个固定的方向,让电机的电流从 u 相流进,vw 相流出,此时给电机一个不大的电流,电机会被锁定在一个固定的位置,电流给定后用手去旋转电机的转轴[6],找出 19 个固定位置并读出相应的位置(19 对极电机有 19 个初始角度),电机相应的会被锁定在19个位置,每个位置之间相隔36 个编码数。通过实验发现电机的初始角如图7所示:
由图7可知,1 个电气周期对应的数是4096/19 = 215.57,由6个扇区构成,一个扇区为 35.929 8,首先看哪个扇区是正转,哪个扇区反转。再在正转的扇区,找稳定的初始角度。初始实验值从电机锁定的几个值对应的编码器值来选取[10]。选取不同的角度作为初始角,进行对比后最终选择出最合适的角度作初始角。
3)通过角度计算电机转速

图7 电机初始角图Fig.7initial angle of motor
由于中断函数时间设置为5ms 计算1次,此时电机反馈的编码数是 n,1 s 对应200n,则算出电机的转速为:

在 CCS 中的程序是:

对电机转速进行滤波后:

4 实验结果及分析
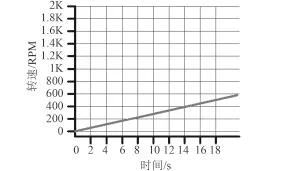
图8 电机零速启动图Fig.8Motor starting speed wave
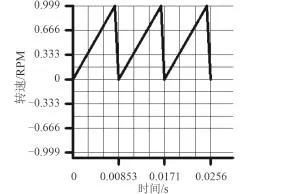
图9电机角度图Fig.9Motor angle wave
图8 是电机从零速启动, 图9是电机的角度图,通过 CCS 中的 DATALOG 模块设置,就可以直接在 CCS
中绘图,图10电机在900rpm 时的转速曲线,图8~图11是通过实际的物理实验得到的真实数据,对相应电机进行 Simulink 仿真得到的数据进行对比。
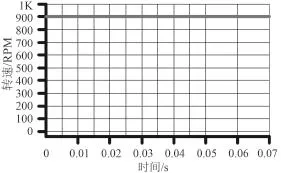
图10 电机 900 rpm 时的转速曲线Fig.10Speed wave on900rpm
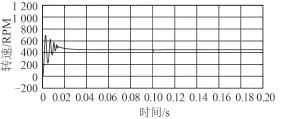
图11 电机 450 rpm 的转速曲线Fig.11Speed wave on450rpm

图12 电机静止三相电流Fig.12Motor’s stator three phase current
通过实验和 Simulink 仿真分析可知,电机有较好的动态性能,稳态运行波动小,对于 UUV 推进电机而言完全满足使用要求。
把工业中的控制方法运用在水下航行器同时用永磁同步电机提到直流电机做动力输入是本文的创新点,用更简单的方法寻找电机的初始角度并计算电机的转速,节省了编写复杂代码的时间,对于处理器而言节省了程序的存储空间,使得效率更高。

图13 电机的速度曲线Fig.13Motor’s speed curve
[1]李刚. 数字信号微处理器的原理及其开发应用[M]. 天津: 天津大学出版社, 2000: 239.
[2]唐任远. 现代永磁电机——理论与设计[M]. 北京: 机械工业出版社, 1997.
[3]李志民, 张遇杰. 同步电动机调速系统[M]. 北京: 机械工业出版社, 1996.
[4]程善美, 蔡凯, 龚博. DSP在电气传动系统中的应用[M]. 北京: 机械工业出版社, 2009.
[5]MATSUI N. Sensorless PM brushless DC motor drives[J]. IEEE Transactions on Industrial Electronics, 1996, 43(2): 300–308.
[6]VAS P. Sensorless vector and direct torque control[M]. Oxford: Oxford University Press, 1998: 122–154.
[7]LI L Y, CUI S M, ZHENG P, et al. Experimental study on a novel linear electromagnetic pumping unit[J]. IEEE Transactions on Magnetics, 2001, 37(1): 219–222.
[8]LI L Y, CUI S M, ZHENG P, et al. Experimental study on a novel linear electromagnetic pumping unit[J]. IEEE Transactions on Magnetics, 2001, 37(1): 219–222.
[9]HENKE M, GROTSTOLLEN H. Control of the NBP linear drive system[J]. Control Engineering Practice, 2002, 10(9): 1029–1035.
[10]KANG D H, CHUN Y H, WEH H. Analysis and optimal design of transverse flux linear motor with PM excitation for railway traction[J]. IEE Proceedings-Electric Power Applications, 2003, 150(4): 493–499.
Design of field-oriented controllers on PMSM
HUANG Bin, PAN Yun-jiao
(Kunming Shipbrone Equipment Research &Test Center, Kunming 650010, China)
This paper established simulation mode and through the study of the motor drive control principle, proveing the control strategy is feasible. A new method for seeking initial angle of the motor and the motor speed calculation, It shows that the scheme can effectively achieve stable control of the control system.
permanent magnet synchronous motor;FOC control;double loop system
TM32
A
1672 – 7619(2016)11 – 0133 – 05
10.3404/j.issn.1672 – 7619.2016.11.028
2016 – 05 – 10;
2016 – 06– 30
黄斌(1986 – ),男,硕士研究生,助理工程师,研究方向为能源与动力。
猜你喜欢
南北桥(2022年2期)2022-05-31 04:28:07
防爆电机(2020年6期)2020-12-14 07:16:54
成都信息工程大学学报(2018年3期)2018-08-29 01:08:40
电脑知识与技术·经验技巧(2017年9期)2018-02-24 19:55:20
电子设计工程(2017年20期)2017-02-10 03:39:29
光学精密工程(2016年3期)2016-11-07 09:03:49
西南交通大学学报(2016年4期)2016-06-15 20:29:36
计算机技术与发展(2016年10期)2016-02-27 00:44:08
电子器件(2015年5期)2015-12-29 08:42:24
大电机技术(2015年5期)2015-02-27 08:22:28