基于MSP430F149的无线遥控智能螺栓紧固器
2016-12-07 06:00田涛黄冰黄祖荣张臻戴德嵩陈昊
电气自动化 2016年4期
田涛 , 黄冰 , 黄祖荣 , 张臻 , 戴德嵩 , 陈昊
(1.江苏省电力公司检修分公司,江苏 南京 210000;2.东南大学 电气工程学院,江苏 南京 210000)
基于MSP430F149的无线遥控智能螺栓紧固器
田涛1, 黄冰1, 黄祖荣1, 张臻1, 戴德嵩2, 陈昊1
(1.江苏省电力公司检修分公司,江苏 南京 210000;2.东南大学 电气工程学院,江苏 南京 210000)
基于MSP430F149芯片,提出一种无线遥控智能螺栓紧固器。通过无线控制的方式对螺栓进行紧固操作,并实时检测螺栓紧固器的工作情况。阐述了螺栓紧固器的设计方案,组成模块及其工作原理。实践证明,螺栓紧固器可以满足电力行业中大型螺栓紧固的严格要求,同时避免作业人员直接操作可能带来的安全问题。
MSP430F149;螺栓紧固;无线控制;实时检测;智能设计
0 引 言
在电力生产中,输电线路带电检修、停电检修或工程验收工作中,对跳线引流板等导线侧金具螺栓的紧固和紧固情况的检测,作业人员需要通过笨重的专用工具才能进入作业部位作业,劳动强度大,工作效率低,作业危险性高,特别是等电位紧固引流设备松动发热螺栓,存在较高的风险。如果采用人员等电位进行消缺处理,存在极大的安全隐患,因此研究一种安全、高效的作业技术非常必要[1]。本文基于MSP430F149芯片,提出一种无线遥控智能螺栓紧固器。能够通过无线控制的方式对螺栓进行紧固操作,并实时检测螺栓紧固器的工作情况。
1 总体设计方案
无线遥控智能螺栓紧固器由手持端和操作端两部分组成。手持端由一块微处理器芯片MSP430F149为核心,连接显示模块,按键模块,语音模块和无线传输模块,可以预设扭矩值,无线启动整套设备工作,并实时接收和显示当前工作的扭矩值。操作端同样以MSP430F149为核心,连接ADC采样模块和无线传输模块。接收手持端发送的电机控制命令,驱动电机正反转,实时采集扭矩信息,通过无线模块将数据传输回手持端。图1为无线遥控智能螺栓紧固器的结构示意图。图2为操作端的结构。

图1 无线遥控智能螺栓紧固器的结构示意图
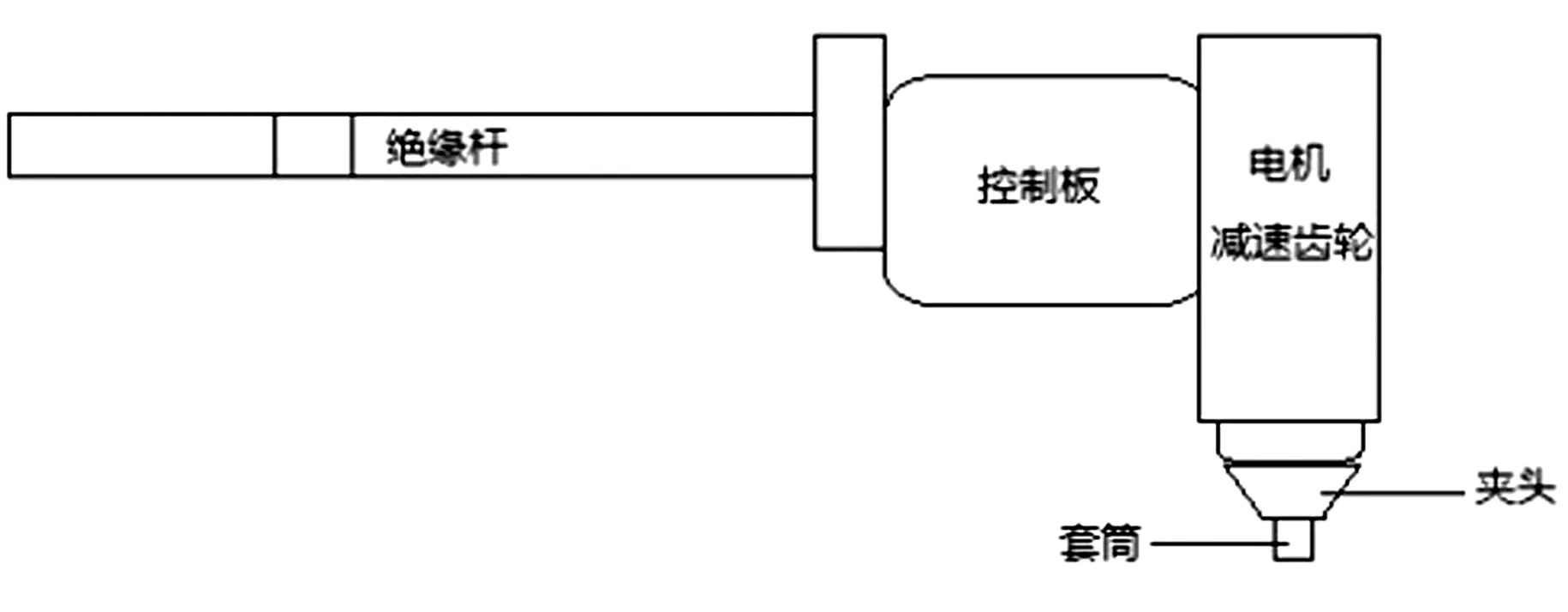
图2 无线遥控智能螺栓紧固器操作端外观示意图
2 系统设计
2.1 主控芯片的选用
本文选用低功耗微处理器MSP430F149为主控芯片。该芯片的特点是低电压、超低功耗。工作电压3.6 V~1.8 V ,正常工作模式电流为280 μA,待机模式1.6 μA,RAM数据保存的掉电模式下0.1 μA。能够快速苏醒,从待机模式下恢复工作,只需要不到6 μs时间。具有12位ADC,内部含参考电压源,并且具有采样、保持、自动扫描等功能。具有12位的模数转换器,可以得到较高的采样精度,并且省去了使用专门的模数转换器给设计电路板带来的麻烦[2]。
2.2 扭矩数据的采集处理电路设计
无线遥控智能螺栓紧固器驱动直流电机进行工作,而直流电机的电磁转矩与电枢电流有关。直流电机的电磁转矩如下:
(1)
式中CT与电机构造有关,对已制成的电机是一个常数;磁通φ与电压有关,该螺栓紧固器采用锂电池供电,可将φ视为常数。由此得出:该螺栓紧固器的电磁转矩与电枢电流成正比,因此只需要采集电机的电流即可反映转矩的大小[3]。由于ADC数据采集系统只能采集电压值,使用霍尔电流传感器,将电流转化为电压进行采集。该传感器输出电压与电流关系为:
(2)
式中Ip为当前检测的实时电枢电流值,Ipn为霍尔电流传感器的额定电流值 。
MSP430F149芯片内置的ADC采样模块选取的基准电压为2.5 V,为保证单片机的安全使用,在ADC采集电压数据前添加一个数据处理电路,主要是利用精密电阻进行分压,运算放大器作为电压跟随器,保证采集的数据波动小,且在采集量程内。图3为ADC数据采集的前端处理电路。
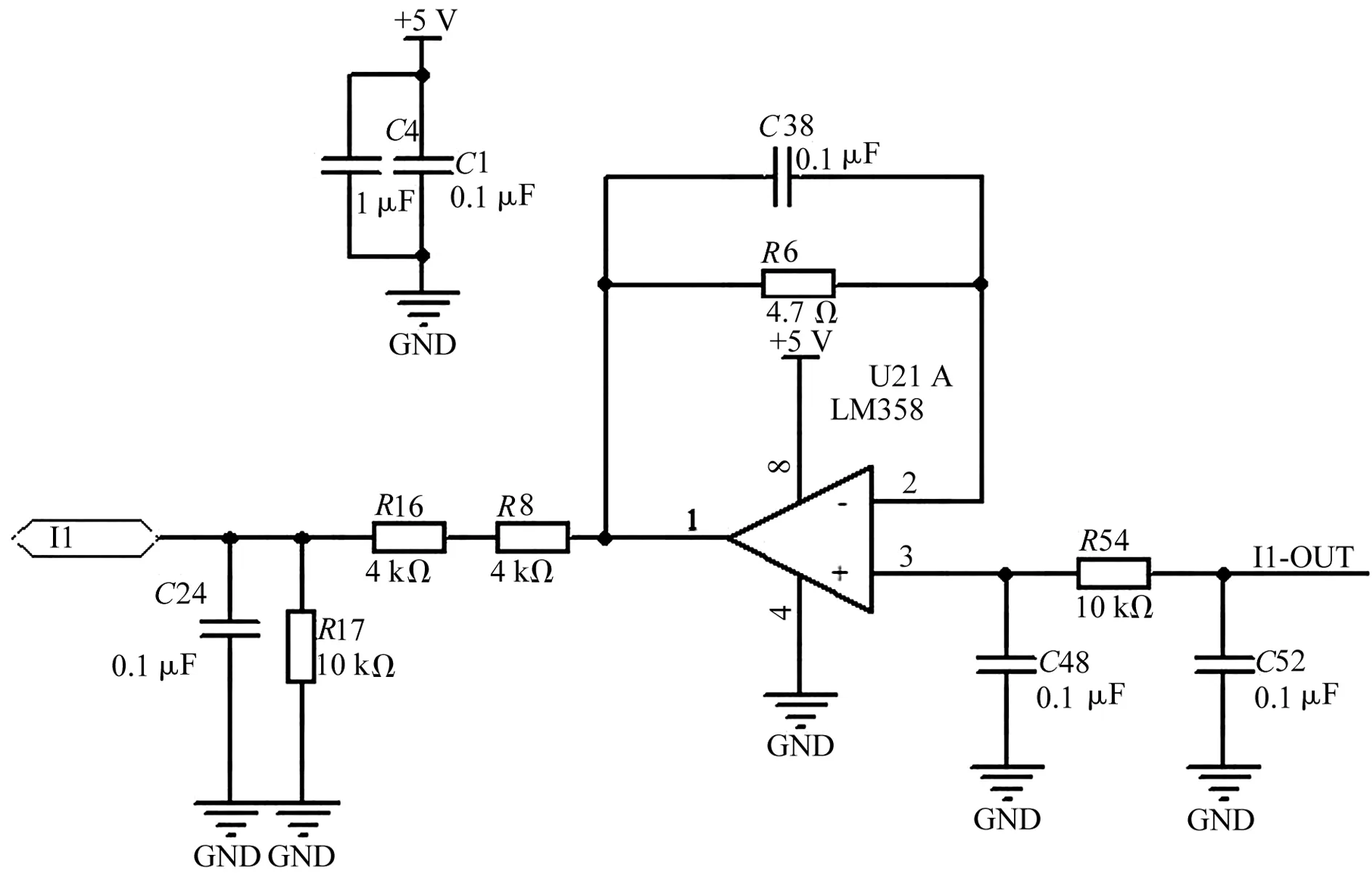
图3 ADC数据采集的前端处理电路
2.3 手持端与操作端的无线通讯模块
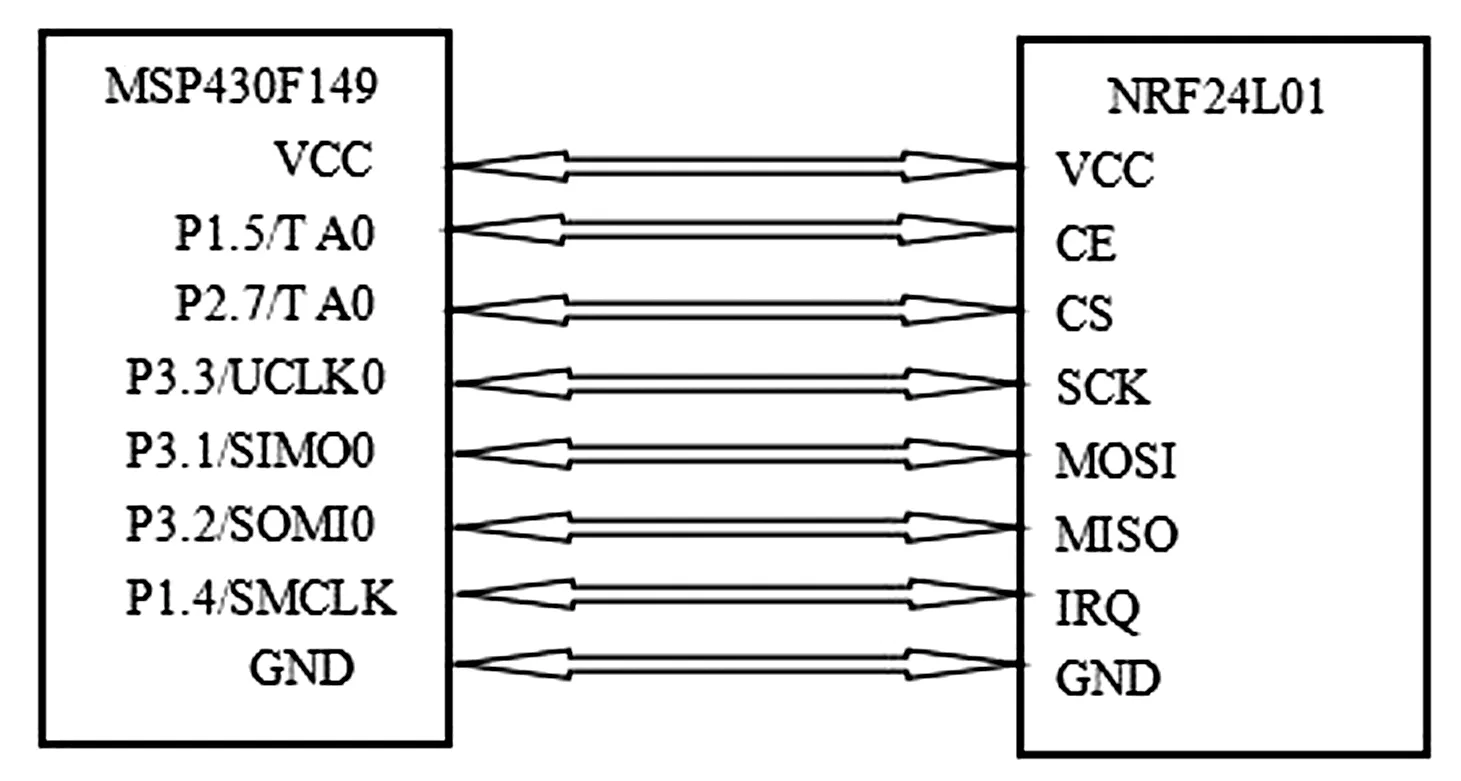
图4 NRF24L01与MSP430F149的接口
基于低功耗低电压的设计原则,手持端和操作端都选用NRF24L01无线模块。NRF24L01是一款新型单片射频收发器件,工作于2.4 GHz~2.5 GHz ISM频段。内置频率合成器、功率放大器、晶体振荡器、调制器等功能模块,输出功率和通信频道可通过软件进行配置。在空旷的环境下,其传输距离大约是40 m到50 m[4],满足无线遥控智能螺栓紧固器的通信距离需求。NRF24L01与MSP430F149的接口如图4所示。
发射数据时,首先将NRF24L01配置为发射模式,把接收节点地址和有效数据按照时序由SPI口写入NRF24L01发送缓存寄存器中(接收节点地址在发射时写入一次即可)。CE需置为高电平并保持至少10 μs,延迟130 μs后激发数据发送。数据发送后,若CE为低则NRF24L01进入空闲模式,等待下一条命令;若接收缓存寄存器中有数据且CE为高,则进入下一次发射。
接收数据时,首先将NRF24L01配置为接收模式,延迟130 μs后进入接收状态准备接收数据。当接收方检测到有效的地址时,就将接收到的数据包存储在接收缓存寄存器中,同时中断标志位置高,产生中断,通知MCU去取数据[5]。
通过软件的配置,NRF24L01可以在发射模式和接收模式之间任意切换,满足无线遥控智能螺栓紧固器通信的灵活性要求。手持端可以发送工作命令,并且接收操作端的工作状态信息,操作端可以接收工作命令,并且发送当前的扭矩信息到手持端,完成双向通信。
2.4 电机控制电路的设计
螺栓紧固器操作端的主体部分为直流电机。现阶段,直流电机的调速主要通过改变电枢电压来实现[6]。改变电枢电压的方法有很多,随着电力电子技术的不断发展,更多的采用PWM的调压方式[7]。利用功率MOSFET,在栅极脉冲周期相同的条件下,改变脉冲宽度(也就是占空比),可以很方便的控制加载到电机两端的电压值,从而达到调速的目的,占空比高则转速高,占空比低则转速低[8]。
选用PWM调速系统,有以下优点:使用的MOSFET为全控型器件,其脉宽调制电路的开关频率高,因此系统的频带宽,响应速度快,动态抗扰能力强;此时由于开关频率高,仅靠电动机电枢电感的滤波作用就可以获得脉动很小的直流电流,电枢电流容易连续,系统的低速性能好,稳速精度高,调速范围宽,同时电动机的损耗和发热都较小;其次,在PWM系统中,主电路的电力电子器件工作在开关状态,损耗小,装置效率高,而且对交流电网的影响小,没有晶闸管整流器对电网的“污染”,功率因数高,效率高;最后我们从经济方面考虑,主电路所需的功率元件少,线路简单,控制方便[9]。
采用IR2101作为控制电路开关管的前端驱动芯片,配合功率MOS管IRF3205,完成直流电机的PWM调速控制电路[10]。IR2101具有两路输入HIN和LIN,分别输出HO和LO两路信号,其输入输出对应关系如表1所示。图5和图6为完整的直流电机控制电路。
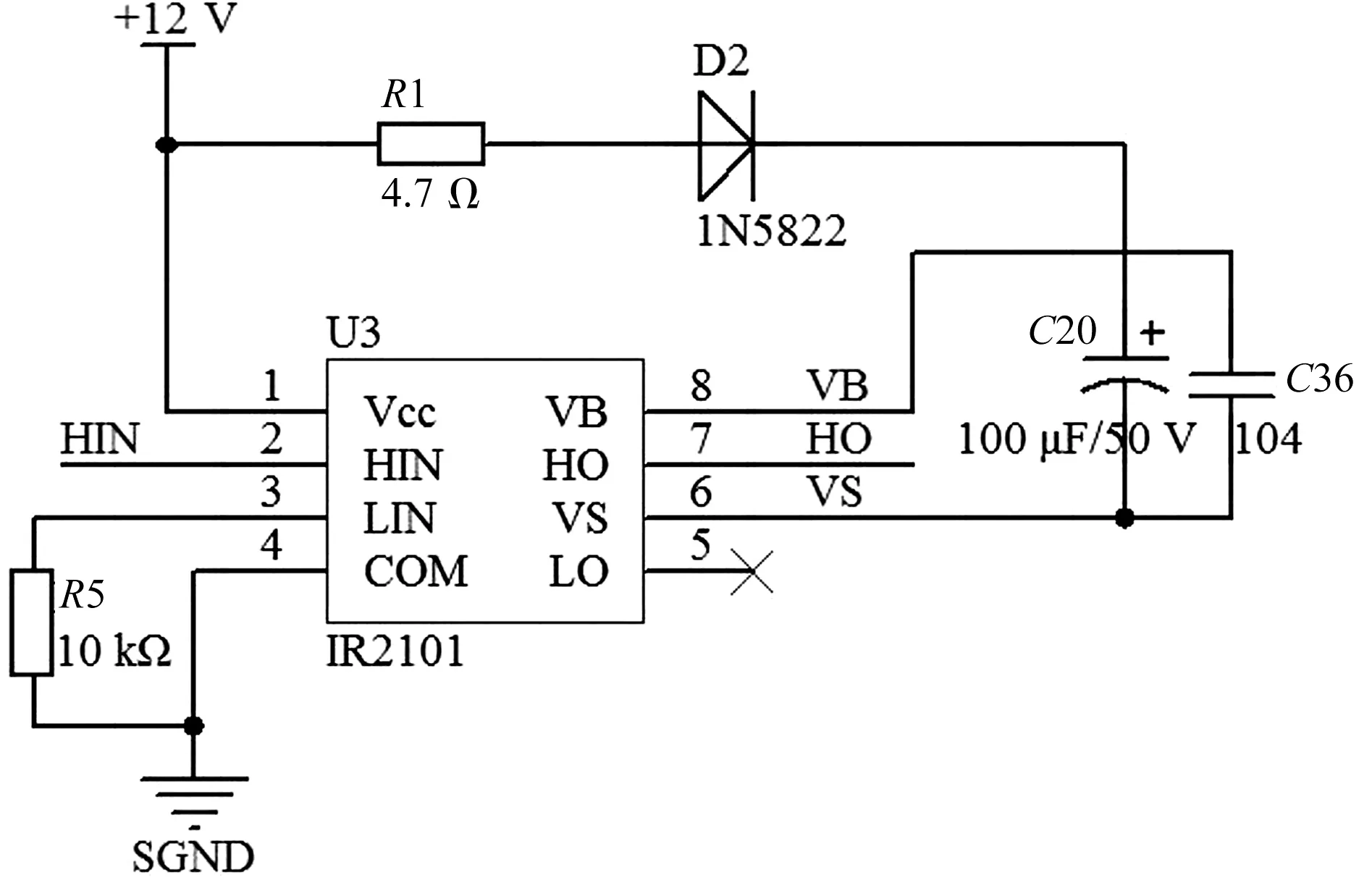
图5 前段驱动芯片IR2101及其外围电路

图6 直流电机控制电路
3 应用实例
MSP430F149芯片配合无线通讯模块NRF24L01,连接信息处理电路以及电机驱动控制电路,外加手持端控制器,如图7所示,组成了螺栓紧固器的完整工作系统。

表1 IR2101输入输出关系

图7 螺栓紧固器的完整工作系统
根据此系统,为操作者设计的具体操作流程是:操作人员在手持端上通过按键模块预先设定需要的扭矩值后,按下启动按键,将开始工作命令无线发送到操作端。操作端接受命令后启动扭矩扳手开始工作。ADC数据采集系统开始工作,实时获取扭矩值信息。操作端的无线传输模块将扭矩信息传输到手持端。

图8 手持端显示模块
手持端上的液晶屏实时显示当前的扭矩值。如图8所示,为正在工作的无线螺栓紧固器,液晶显示屏上显示的当前扭矩信息。当达到预设扭矩时,操作端自动停止工作,手持端语音播放模块播报语音,提醒操作人员工作结束。
2015年11月在南京地区220 kV双闸变电站进行了装置现场测试。测试分为三部分:
(1) 常规测试:在变电站未投运间隔挑选断路器螺栓4处(大型),隔离开关螺栓1处(中型),端子箱螺栓1处(小型),进行了现场紧固、松脱试验,各10次,试验结果表明,能成功紧固、松脱螺栓,成功率100%,达到设计要求。
(2) 急停测试:在断路器螺栓上设置限位点,使用紧固器强行紧固,装置达到既定扭矩后,能及时停止,保护自身设备安全,多次试验,装置完好如常。无异常、发热等问题,符合设计要求。
(3) 带电测试:考虑到在实际的运行220 kV变电站带电测试的危险性,该试验没有校核设计要求的35 kV带电紧固螺栓,在试验场地带电380 V进行了模拟带电紧固,试验结果表明,能在带电情况下,完成既定的紧固、松脱功能,符合设计要求。
4 结束语
实践证明,该螺栓紧固器可以满足电力行业中大型螺栓紧固的严格要求。无线遥控的控制方式避免了带电操作可能带来的安全问题。在无需高压线路停电的情况下进行检测维修,大幅度节约了操作成本,具有较好推广性。
[1] 易晓,林建辉.智能扭矩扳手系统在螺栓紧固中的应用[J].制造业自动化,2013,35(12):150-152.
[2] 陈俊峰,杨向萍.基于MSP430F149的便携式仪器的低功耗设计[J].集成电路应用,2004,21(12):36-38.
[3] 欧传刚,吴志成,金浩,等.电力系统地电位螺栓智能紧固器的研制[J].电力安全技术,2014,16(7):55-57.
[4] 时志云,盖建平,王代华,等.新型高速无线射频器件nRF24L01及其应用[J].国外电子元器件,2007,14(8):42-44.
[5] 荚庆,王代华,张志杰,等.基于nRF24L01的无线数据传输系统[J].现代电子技术,2008,31(7):68-70.
[6] 黄建国,孙克俭.螺栓紧固机的智能控制设计[J].电子科技,2005,19(6):19-23.
[7] 庹朝永. 基于单片机的直流电机PWM调速系统设计与开发[J]. 煤炭技术,2011,30(6):62-63.
[8] 赵轩,韩毅,秦绪鑫,等.基于PWM控制的模型车用小型直流电机调速装置[J].计算机工程与设计,2009,30(21):4884-4887.
[9] 李瑾.一种升/降压斩波器与可逆PWM调速相兼容的实验电路设计[J].科技广场,2011,24(1):203-206.
[10] 陈昊,郭湘奇,田涛,等.隔离开关闭锁回路电子档案构建及应用[J].中国电力,2012,45(7):20-23.
An Intelligent Bolt Fastener under Wireless Remote Control Based on MSP430F149
Tian Tao1, Huang Bing1, Huang Zurong1, Zhang Zhen1, Dai Desong2, Chen Hao1
(1.Jiangsu Electric Power Co., Maintenance Branch, Nanjing Jiangsu 210000, China;2. College of Electrical Engineering, Southeast University, Nanjing Jiangsu 210000, China)
Based on MSP430F149 chip, this paper presents an intelligent bolt fastener under wireless remote control. Bolts are fastened through wireless control, and working conditions of the bolt fastener is under real-time detection. This paper expounds the design scheme, component modules and operating principle of the bolt fastener. Practice shows that this bolt fastener can satisfy the strict requirements on the fastening of large bolts in the electric power industry and avoid security problems which might occur if operators do it by themselves.
MSP430F149;bolt fastening; wireless control; real-time detection;intelligent design
10.3969/j.issn.1000-3886.2016.04.014
TM755
A
1000-3886(2016)04-0042-03
田涛(1972-),男,江苏南京人,高级工程师,硕士,从事变电检修工作。
定稿日期: 2015-12-27
猜你喜欢
大电机技术(2022年5期)2022-11-17
汽车实用技术(2022年12期)2022-07-05
小学生优秀作文(低年级)(2021年11期)2021-12-06
装备制造技术(2020年2期)2020-12-14
语文世界(小学版)(2019年2期)2019-02-24
凿岩机械气动工具(2017年3期)2017-11-22
电子制作(2017年1期)2017-05-17
电子制作(2016年1期)2016-11-07
电子产品可靠性与环境试验(2016年6期)2016-05-17
中国机械工程(2015年13期)2015-12-16