非高斯噪声背景下计算机视觉目标跟踪方法
2016-12-07 07:05:25王秉王子衡
华侨大学学报(自然科学版) 2016年6期
王秉, 王子衡
(1. 河南交通职业技术学院 航运海事系, 河南 郑州 450000;2. 达姆施塔特工业大学 电子信息工程系, 德国 达姆施塔特 64289)

非高斯噪声背景下计算机视觉目标跟踪方法
王秉1, 王子衡2
(1. 河南交通职业技术学院 航运海事系, 河南 郑州 450000;2. 达姆施塔特工业大学 电子信息工程系, 德国 达姆施塔特 64289)
针对杂波背景下计算机视觉目标跟踪问题,提出一种非高斯噪声背景下计算机视觉目标跟踪方法.在视频目标运动模型和观测模型的基础上引入了柯西混合噪声模型,对非高斯噪声运动目标的状态进行建模;然后,在传统高斯噪声粒子滤波的框架内给出文中方法的具体实现步骤.针对大面积遮挡和夜晚光照改变的极端情况下对路上行驶的车辆进行实时跟踪实验,结果表明:文中方法明显提升极端杂波环境下的目标运动过程的建模精度,有效提升目标跟踪精度.
计算机视觉; 非高斯噪声; 粒子滤波; 杂波环境; 跟踪精度
基于计算机视觉的视频目标跟踪技术是人工智能、视频监控、智能会议、智能交通等领域的基础研究课题[1-2].由于视频在杂波环境下干扰较多,容易导致跟踪目标的混叠,特别是多目标遮挡、目标的消失与再现及光照突变等影响,给传统的基于检测跟踪的方法带来了很大的挑战[3-4].随着非线性滤波技术的发展,研究人员将基于贝叶斯滤波技术的非线性滤波方法引入到计算机视觉跟踪领域.颜佳等[5]首次将卡尔曼滤波(kalman filter,KF)方法引入到视觉目标跟踪领域,虽然实现了文中环境下的有效跟踪,但是由于KF只适应高斯解析模型的线性目标运动系统,在杂波机动非线性运动系统中无法实现有效跟踪;龚俊亮等[6]提出了扩展卡尔曼滤波(EKF)视觉目标跟踪方法,基于泰勒级数对非线性目标运动模型进行一阶近似截断处理,实现了视觉目标的有效跟踪;Dou等[7]提出了基于无迹卡尔曼滤波(UKF)视觉目标跟踪方法,采用UT变换取代EKF的雅克比矩阵的计算,对目标状态后验的均值和方差进行时间先后的传递,获取了更高精度的跟踪结果.为实现更加复杂环境下的视频目标跟踪问题,近年来,研究人员先后将更加适应强非线性系统的粒子滤波(PF)[8]和容积卡尔曼滤波(CKF)[9]方法应用到杂波环境下的视觉目标跟踪问题,取得了较大程度的发展.虽然该类方法在视觉目标跟踪领域取得了优秀的应用成果,但是这些方法均是基于高斯噪声的假设给出的具体解析实现方法,这种高斯噪声统计特性的假设无法满足目标遮挡、光照变化等杂波情况下的目标背景.基于此,本文提出了一种非高斯噪声背景下计算机视觉目标跟踪方法.
1 系统模型的建立和实现
1.1 过程状态
针对计算机视觉目标跟踪问题,将某一时刻目标的状态记为xk=[x,y,w,h].其中:x,y为跟踪目标的质心点(通常情况下为矩形方框或椭圆的中心点);w,h为矩形方框的宽和高(或椭圆的短轴和长轴).视频目标的运动模型表示[10]为
(1)
式(1)中:xk,yk为k时刻的状态和观测;f(·),h(·)为相应的过程和观测的动态转移函数;uk为控制参量;wk,vk为相应的噪声分量;Γk为噪声的输入矩阵参量.系统模型和观测模型的动态函数,与系统的初始状态x0一起决定了整个滤波系统的动态模型.
1.2 观测模型说明

(2)
式(2)中:σc,i为高斯方差值,σc,i=0.2.
1.3 基本粒子滤波实现原理
基本粒子滤波方法主要通过赋予相应权重信息的粒子集合加权近似估计系统的瞬时状态,并通过在线量测信息递归的估计目标的后验状态分布.粒子权值信息主要来依赖后验概率密度和参考的先验概率密度的似然量测.在实际的PF视频目标跟踪系统中,需要目标的运动模型,将式(1)表示为
(3)
式(3)中:fm-1为Rk×Rn→Rk维的目标状态非线性函数;ωm-1∈Rn为零均值的白噪声序列,协方差为Qk,其大小代表目标状态预测的不确定度;相应观测信息zm∈Rz的表达式为
(4)
式(4)中:hm∶Rm×Rq→Rz为观测非线性函数;量测误差um是零均值的白噪声序列;协方差Rk表示量测的不确定度.标准PF可以概括为如下两个步骤.
步骤1 预测.在获取m-1时刻的概率密度函数p(xm-1|zm-1)以后,基于式(1)表示的系统模型,可以预测m时刻的概率密度函数为
(5)
步骤2 更新.在给定先验信息和最新观测序列zm={zi;i=1,2,…,m}条件下,可以获取后验密度的估计值为
(6)
式(5),(6)形成了PF状态估计的递归过程.

(7)
在系统状态满足马尔科夫链特性的条件下,后验状态可以表示为
(8)
式(8)中:δ(·)为Diracdelta函数.
(9)
1.4 非高斯噪声模型
目前,常用的非线性滤波方法中,均采用高斯噪声对系统过程进行建模分析,实际上并不符合遮挡、光照对比度较低等杂波环境.由于模型误差累积效应的影响,目标跟踪的精度和有效性都会有所降低,基于此,参考文献[13]的研究,采用柯西-高斯混合噪声模型取得传统非线性滤波系统的高斯噪声模型,对杂波环境下的视觉目标跟踪模型进行建模分析.其中,柯西-高斯混合噪声可以表示为
(10)
式(10)中:模型混合比例可以计算为
(11)
式(11)中:0<α<2;γ为符合α稳态分布特征的比例系数.在实际的视觉跟踪系统中,可以将模型(3)中的wk,vk的统计特性表示为
(12)
式(12)中:v为柯西分布峰值所在的位置参量,表示当前帧图像中心点位置像素值;γ为柯西分布最大值的一半对应的宽度尺寸;μ,σ分别代表着高斯分布的均值和方差.
2 仿真实验分析
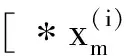
实验中,采用目前滤波跟踪方法普遍采用的特征提取方法.为增强运动信息的有效性,提取了运动目标的运动边缘特征作为观测信息进行处理.两种情况下的具体实验结果,如图1~4所示.图2中:eRMS为均方根误差.
图1,3中:黑方框为文中方法跟踪结果;灰方框为高斯噪声条件下的标准粒子滤波方法.由图1~4可知:文中方法实现了较好的跟踪,其跟踪效果明显优于传统高斯噪声统计特性假设情况下的标准粒子
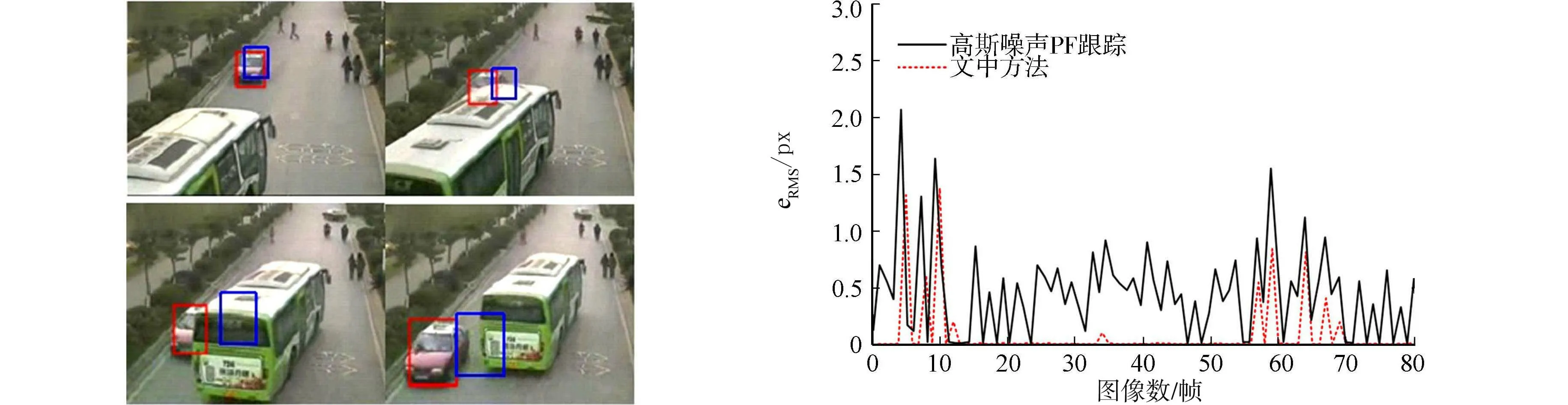
图1 遮挡情况下跟踪结果 图2 遮挡情况下跟踪均方根误差曲线Fig.1 Tracking results under occlusion Fig.2 Tracking mean square error and curve under occlusion
图3 夜间跟踪结果 图4 夜间跟踪均方根误差曲线Fig.3 Tracking results at night Fig.4 Tracking mean square error and curve at night
滤波方法;在两种复杂情况下,由于文中方法引入了非高斯噪声模型,一定程度上提升了目标运动的过程状态模型;文中方法在杂波环境下的跟踪精度较标准PF方法提升了近40%.
3 结束语
以杂波环境下视频目标跟踪问题为背景,探索了非高斯噪声情况下计算机视觉目标跟踪问题.在视频目标运动模型和观测模型的基础上引入了柯西混合噪声模型,对非高斯噪声运动目标的状态进行建模.然后,在标准粒子滤波的框架内给出了方法的具体实现步骤.最后,基于部分遮挡和光照对比度较低的视觉跟踪问题进行仿真实验,验证了文中方法的有效性和精确性.
[1] MORRIS J B T,TRIVEDI M M.Contextextual activity visualization from long-term video observations[J].IEEE Intelligent Systerms,2010,25(3):50-62.
[2] 刘晨光,程丹松,刘家锋,等.一种基于交互式滤波器的视频中多目标跟踪算法[J].电子学报,2011,39(2):260-267.
[3] 李春鑫,王孝通.基于Rao-Blackwellized粒子滤波的多特征融合多光谱目标自适应跟踪[J].光学精密工程,2009,17(9):2321-2326.
[4] CAO Jie,LI Wei,WU Di.Multi-feature fusion tracking based on a new particle filter[J].Journal of Computers,2012,12(7):2939-2947.
[5] 颜佳,吴敏渊.遮挡环境下采用在线Boosting的目标跟踪[J].光学精密工程,2012,20(2):439-446.
[6] 龚俊亮,何昕,巍仲慧,等.采用改进辅助粒子滤波的红外多目标跟踪[J].光学精密工程,2012,20(2):413-420.
[7] DOU Jianfang,LI Jianxun.Robust visual tracking base on adaptively multi-feature fusion and particle filter[J].Optik,2014,125(2014):1680-1686.
[8] MORSHIDI M,TJAHJADI T.Gravity optimised particle filter for hand tracking[J].Patter Recognition,2014,47(2014):194-207.
[9] 宋宇,李庆玲,康轶非,等.平方根容积 Rao-Blackwillised 粒子滤波SLAM算法[J].自动化学报,2014,40(2):357-367.
[10] 孙中森,孙俊喜,宋建中,等.一种抗遮挡的运动目标跟踪算法[J].光学精密工程,2007,15(2):268-271.
[11] WU Bingfei,KAO ChihChung,JEN Chenglung,et al.A relative discriminative histogram of oriented-gradients-based particle filter approach to vehicle occlusion handling and tracking[J].IEEE Transaction on Industrial Electronics,2014,61(8):4228-4237.
[12] 钟必能,潘胜男.选择性搜索和多深度学习模型融合的目标跟踪[J].华侨大学学报(自然科学版),2016,37(2):207-212.
[13] SAHA S,GUSTAFSSON F.Particle filtering with dependent noise processes[J].IEEE Transaction on Signal Processing,2012,60(9):4497-4508.
(责任编辑: 陈志贤 英文审校: 吴逢铁)
Computer Vision Target Tracking Method Under Non-Gauss Noise Background
WANG Bing1, WANG Ziheng2
(1. Department of Maritime, Henan Vocational and Technical College of Communications, Zhengzhou 450005, China;2. Department of Electrical Engineering and Information Technology,Technical University of Darmstadt, Darmstadt 64289, Germany)
Aiming at the problem of computer vision target tracking in clutter background, a computer vision target tracking method under non Gauss noise background is proposed. Based on the vision target moving model and observation model, the Cauchy mixed noise model is introduced to model the non Gauss noise moving object, and the non Gauss noise moving target state is modeled. The proposed method concrete implementation steps is realized in the framework of the traditional Gauss noise particle filter. For driving large area occlusion and night illumination change under extreme conditions on the road of the vehicle real-time tracking, the experimental results show that this method significantly improve the modeling accuracy of extreme clutter target motion process, effectively improve the accuracy of target tracking.
computer vision; non-Gaussian noise; particle filter; clutter environment; tracking accuracy
10.11830/ISSN.1000-5013.201606023
2016-10-18
王秉(1965-),男,副教授,主要从事计算机图形图像的研究.E-mail:wbjtxy@163.com.
国家自然科学基金资助项目(201411326136); 河南省科技厅资助项目(2013132300410337); 河南省教育厅资助项目(JYB2015037)
TP 391
A
1000-5013(2016)06-0774-04
猜你喜欢
数学小灵通(1-2年级)(2024年4期)2024-05-14 09:30:52
科学与信息化(2021年30期)2021-12-24 08:00:20
小学生学习指导(低年级)(2019年6期)2019-07-22 03:33:10
西北工业大学学报(2015年3期)2015-12-14 13:08:44
空间控制技术与应用(2015年3期)2015-06-05 14:30:31
遥测遥控(2015年2期)2015-04-23 08:15:22
遥测遥控(2015年2期)2015-04-23 08:15:18
四川师范大学学报(自然科学版)(2015年2期)2015-02-28 14:07:36
现代防御技术(2014年6期)2014-02-28 18:26:39
电子设计工程(2014年20期)2014-02-27 12:01:00