
超声电机直驱的电动物镜控制方法
2016-12-07 03:13:57黄卫清
振动、测试与诊断 2016年4期
潘 松, 菅 磊, 黄卫清
(南京航空航天大学机械结构力学及控制国家重点实验室 南京,210016)
超声电机直驱的电动物镜控制方法
潘 松, 菅 磊, 黄卫清
(南京航空航天大学机械结构力学及控制国家重点实验室 南京,210016)
针对超声电机直接驱动的显微镜物镜为满足系统整体结构紧凑、快速和准确定位的需求,采用小型光电耦合器设计了位置检测传感器,配合遮挡片实现了物镜位置和物镜转换器运动方向的检测。采用传统比例-积分-微分控制(proportion-integral-derivative control,简称PID)和模糊控制提出了并行切换控制策略,将两者结合建立了宏微相融合的预测控制方法,实现了物镜转换器的高精度、快速切换控制。在嵌入式控制系统中实现了所设计的控制算法和策略,并进行了物镜自动切换控制实验。实验结果显示,采用笔者提出的定位结构和控制方法,电动物镜转换器的重复定位误差小于0.015°,定位时间小于3 s,满足自动显微镜系统中对电动物镜转换器重复定位精度的要求。
电动物镜转换器; 超声电机; 模糊控制; 比例-积分-微分控制; 切换控制
引 言
用显微镜对微观世界进行观察时,为满足不同视域的观察,需要切换到不同放大倍数的物镜,在某些检测场合要求操作者不能直接接触显微镜,因此需要能够快速、准确切换物镜和实现远程操作的电动物镜转换器[1]。目前,电动物镜转换器的驱动电机普遍采用传统的电磁电机,并配以减速装置和传动机构,导致整个转换装置体积大而笨重。选用结构紧凑、体积小的动力源直接驱动的物镜转换装置是电动物镜转换器的一个发展趋势。将超声电机作为动力源直接驱动的物镜转换器与采用传统电磁电机驱动的电动物镜转换器相比,具有体积小、重量轻、定位准确、断电自锁和噪声低等特点[2-5]。由于超声电机具有高度非线性和时变性,根据控制目标要求,针对不同应用场合采用合适的控制算法和策略是目前研究的热点之一。为满足复杂应用环境,一些复合控制方法,例如将PID控制和智能控制相结合形成模糊PID控制、单神经元自适应PID控制等控制算法在进一步研究中[5-12]。
超声电机直接驱动的电动物镜转换器由于其内部空间小,无法安装高精度的传感器进行位置检测。笔者采用两个小型光电耦合器设计了位置传感器并配合齿型遮挡片实现物镜位置和物镜转换器运动方向的检测。考虑控制速度和精度要求,笔者提出宏微控制相结合的方式,实现物镜转换器的快速、高精度定位。宏观控制采用连续工作方式和步进工作方式相结合的方法来实现目标位置的快速粗定位。微控制采用模糊控制PID方法实现目标位置的高精度定位。最后通过实验对所提出的控制方法进行了验证。
1 电动物镜转换器系统
1.1 定位机构的设计
超声电机安装在物镜转换器的内部,通过螺钉固定在固定板上,如图1所示。超声电机转轴的花键与转动板的花键槽相配合,通过螺钉将转轴与转动板固定。光电耦合器及其处理电路经支架固定在固定板。遮挡板固定在转动板的内侧圆弧面上,且安装位置与物镜的位置一一对应[2]。

图1 电动物镜转换器结构图Fig.1 Structure of motorized nosepiece
由于物镜转换器内部空间的限制,无法安装体积相对较大的高精度传感器,因此笔者选用体积相对较小的光电耦合器作为物镜定位的检测传感器。定位速度与定位精度往往是相互矛盾的,高精度则定位时间长,相反速度快则定位精度低。单个光电耦合器只能起到快速定位,不能满足较高定位精度的要求。在高速度运转情况下,控制系统检测到位置传感器信号控制超声电机停止时会产生超调。为了能实现快速、高精度的定位,笔者设计了如图2所示的位置检测结构。两光电耦合器并排布置,它们的中心的距离a小于遮挡片两齿间的距离b,且存在两个齿同时分别遮挡两个光电耦合器的时刻,在每一个物镜安装位置安装一个相同的遮挡片。旋转过程中,遮挡片的第1个齿遮挡第1个光电耦合器时,可以实现预判目标位置,采用智能控制策略可以实现物镜转换器的快速、高精度的定位。
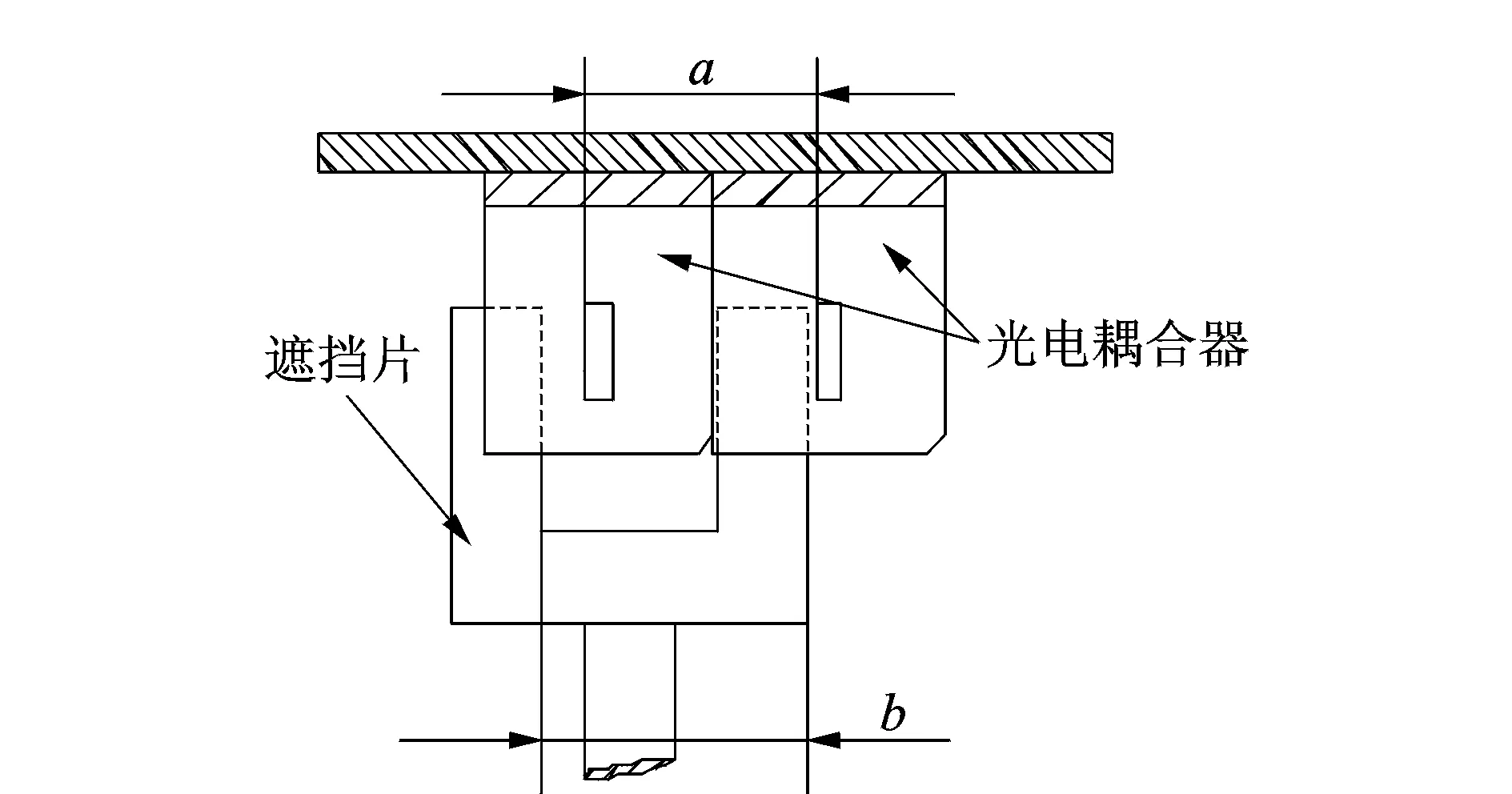
图2 定位结构示意图Fig.2 Diagram of positioning
1.2 位置信号
当超声电机驱动物镜转换器旋转遮挡片经过位置检测传感器时,传感器检测到的位置信号如图3所示。低电平表示挡片遮挡住了光电耦合器的狭缝。高电平表示光电耦合器的狭缝未被遮挡,每一个物镜位置对应3号刻线对应的位置。CW表示电动物镜转换器逆时针旋转;CCW表示电动物镜转换器顺时针旋转。

图3 位置信号Fig.3 Signal of position
1.3 步进特性实验
为保证每个物镜停在图3中3号刻线附近,需要对超声电机采用步进控制,即施加一定周期数的驱动信号,超声电机会旋转一定的角度,这个角度称为超声电机的步进角。步进角与驱动信号周期数的关系对控制的精度及控制算法的复杂程度具有较大影响。笔者采用南京航空航天大学精密驱动研究所研制的TRUM-30超声电机作为研究对象,检测传感器采用RENISHEW公司的RCH20W30D32A环形光栅尺,分辨率为0.55″。在驱动信号频率为36 kHz下,测得超声电机的步距角与驱动信号的脉冲个数的关系,如图4所示。可以看出,在驱动频率一定的情况下,步距角和电机驱动信号的脉冲个数基本呈线性关系。
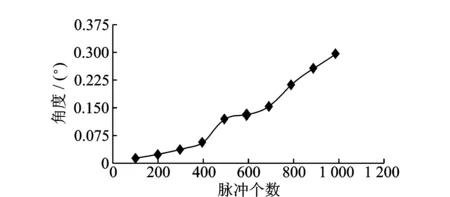
图4 步距角曲线Fig.4 Curve of step angle
2 电动物镜转换器位置控制策略
为实现快速准确定位,笔者采用并行切换控制策略,即采用经典PID控制算法与模糊控制算法并行,根据传感器反馈的位置信号进行控制算法的切换,控制器结构如图5所示。电机驱动物镜旋转到达第1个刻度线之前,由PID控制器通过电机的孤极反馈电压对电机进行高速度稳定控制,位置检测传感器检测到第1个刻度线后,算法切换至模糊控制算法,这样系统在实现快速定位的同时,又可以实现高精度位置锁定。
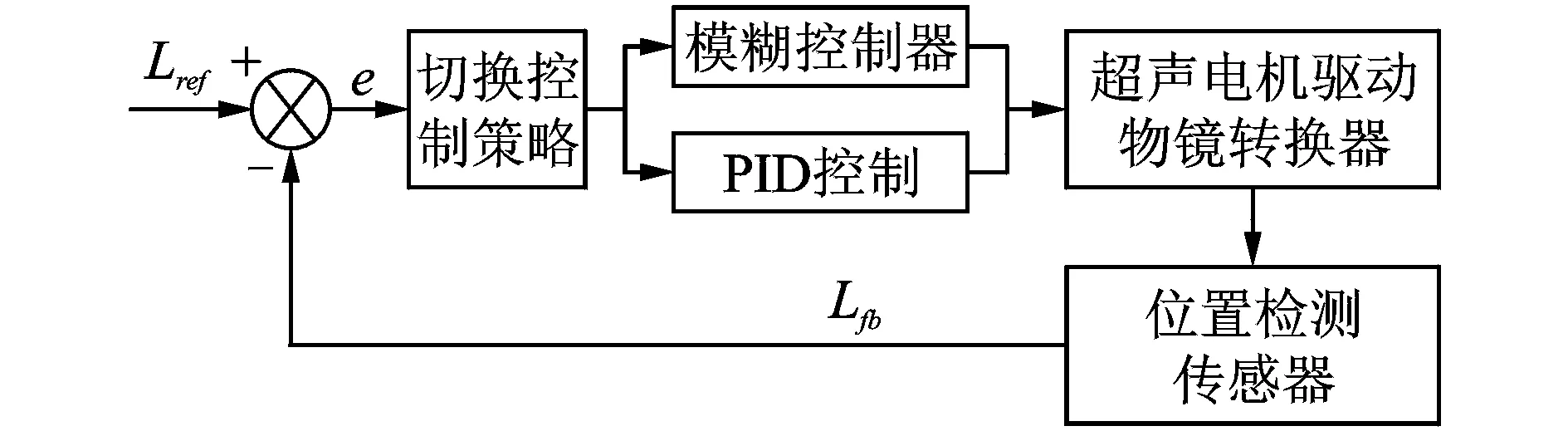
图5 控制策略框图Fig.5 Diagram of the control strategy
2.1 快速定位
经典PID控制算法具有技术成熟和不需要建立数学模型等特点,对一些简单控制模型的控制效果好,且系统稳定性较高[6,11],在快速定位阶段可以满足要求。为了简化计算,在快速定位阶段,笔者采用增量式PID算法,表达式为
(1)
令Δf(k)=f(k)-f(k-1),得到
其中:A1=Kp+KI+Kd;A2=-KP-2KD;A3=KD;定义KP,KI,KD分别为PID算法的比例、积分和微分参数;f(k)为k时刻的电机工作频率;e(k)为k时刻距离目标位置的距离。
在连续旋转模式下,速度较快且电动物镜转换器存在较大的惯性能量,断电之后电动物镜转换器会由于惯性旋转一定的角度,导致控制系统产生超调,因而在目标位置前设置预停止位来解决惯性旋转导致的控制系统的超调问题。
笔者将旋转方向上的第1个光电耦合器的位置设定为第1个预停止位。当电机达到此位置时,由连续PID转变成步进PID,从而快速到达粗定位位置,图3中3号位置为第2预停止位。
2.2 精定位
为了保证系统的稳定性,抑制系统在定位过程中出现较大的超调量,采用双输入单输出模糊控制器,控制框图如图6所示。

图6 模糊控制框图Fig.6 Diagram of fuzzy control
2.2.1 模糊控制器的输入、输出量及其论域
模糊控制的输入量选定为离目标位置偏差e=Lref-L及偏差变化量Δe=de/dt,其中:Lref为目标位置;L为当前位置;输出量为驱动周期变化量Δp。为了提高电动物镜转换器定位精度和减少算法的计算量,将偏差e(基本论域[-2 048,2 048])和ec偏差变化量([-2 048,2 048])均量化为13个等级,则有{-6,-5,-4,-3,-2,-1,0,+1,+2,+3,+4,+5,+6},驱动信号周期数变化量Δp([-2 000,2 000]),其中:负数表示电机反向旋转。相应的量化因子和比例因子分别为Ke=0.002 9,Kec=0.002 9,KΔp=0.012。位置偏差、偏差变化量和驱动信号周期数变化量在量化后论域上的变量形式分别定义为E,EC和P。将E,EC,P模糊化为{负大,负中,负小,零,正小,正中,正大},分别用{NB,NM,NS,ZO,PS,PM,PB}表示。位置偏差、偏差变化量和驱动信号周期数变化量的隶属函数如图7所示。

图7 E,EC,P的隶属函数曲线Fig.7 Membership function curve of E, EC, P
2.2.2 模糊控制规则和推理
当偏差较大时,选择控制量以尽快消除误差为主;当误差较小时,选择控制量以保证系统的稳定性和良好的鲁棒性为主要出发点[11-12]。根据表1,当前位置距离目标位置偏差e为正大且偏差变化量ec为正时,偏差有增大的趋势。为快速减小偏差,控制的变化取负大,最大增加超声电机的负步距角,这里负步距角表示电机旋转方向的反方向,即需要增加超声电机驱动信号负周期数。
定义Ai,Bj,Cij为在E,EC,P论域上的模糊集。将模糊条件语句用一个模糊关系描述,即
(3)
模糊关系R的隶属函数为
(4)
其中:x∈E,y∈EC,z∈P。
当模糊控制器的输入E,EC分别取A,B时,输出的控制量的变化P根据模糊推理合成规则为
(5)
控制量P的隶属函数为
根据得到的偏差e和偏差变化ec,可以计算出相应的控制量变化Δp。
3 实 验
实验平台为南京航空航天大学精密驱动研究所研制的自动显微镜系统,如图8所示。电动物镜转换器为笔者所设计。该显微镜使用了同轴光源背向照明方式,图像CCD传感器为UCMOS03,分辨率为2 048×1 536,通过USB2.0将图像传输给计算机,并通过计算机显示器显示。根据实际定位控制要求,对系统进行定位误差测试。检测工具是分辨率为10 μm的分划尺,对应的角度为0.015°,测试结果通过CCD图像检测模块将测试图像传输到计算机上显示。对单个孔镜定位进行多次实验,在40倍物镜下进行的6组闭环定位控制测试数据如图9所示。选择显示界面中的标尺250 μm处作为参照线,即图中的黑色线作为参照线,图中每一格距离是10 μm,发现图9(c)误差最大,但小于10 μm,图9(e)误差最小,几乎没有偏差。由图10可看出,重复定位精度小于10 μm。根据物镜转换器验收标准:研究用显微镜重复定位精度应小于等于15 μm。可见,笔者设计的电动物镜转换器的重复定位精度满足要求,采用提出的控制策略和位置检测传感器可以实现小于0.015°的角度定位控制。

图8 实验平台系统Fig.8 Experimental platform
在实现高精度定位过程中,系统还要求尽可能短的闭环定位时间,采用笔者提出的控制器得到的不同物镜之间切换时间的测试数据如表2所示。可见,不同物镜之间的切换时间小于3 s,满足自动显微镜对物镜之间切换时间小于3 s的要求。
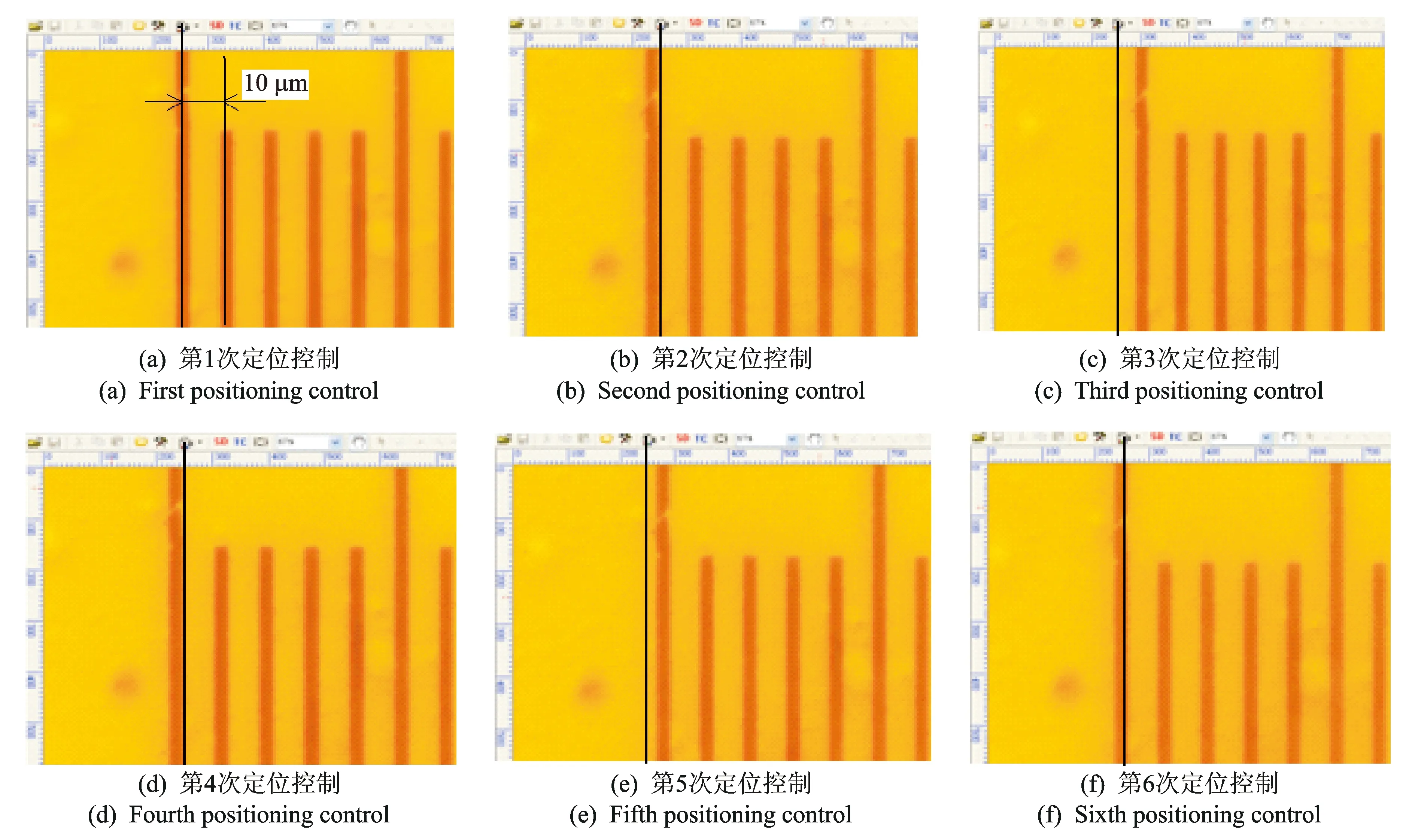
图9 定位误差图像Fig.9 Image of positioning error

图10 重复定位精度Fig.10 Repeatability
表2 不同物镜间的切换时间
Tab.2 Switching time between different nosepiece s
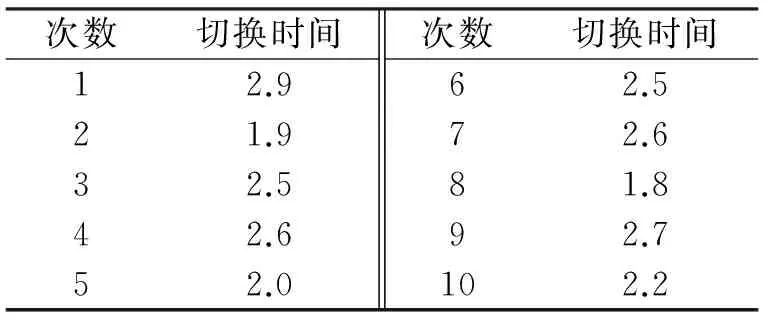
次数切换时间次数切换时间12.962.521.972.632.581.842.692.752.0102.2
4 结束语
利用超声电机直接驱动电动物镜转换器,用光电耦合器设计了一种结构紧凑的位置检测传感器,针对超声电机的非线性和时变性,提出了宏微相结合的预测控制方法,实现了物镜转换器的高精度、快速切换控制。采用笔者提出的定位结构和控制方法,电动物镜转换器的重复定位精度小于0.015°,定位时间小于3 s,满足了自动显微镜系统中对电动物镜转换器重复定位精度和定位时间的要求。实验发现,电动物镜转换器的机械结构对定位精度有重要影响,对机械结构的进一步优化可以提高定位精度。
[1] Che Xuige, Li Yitang, Zhao Xin, et al. Batch targets oriented auto switching of view field in micro-manipulation[J]. Nanotechnology and Precision Engineering, 2010, 8(3): 215-220.
[2] 孙志峻, 朱华. 超声电机直接驱动的电动物镜转换器:中国, 201110259454.7[P]. 2011-09-03.
[3] 赵淳生. 面向 21 世纪的超声电机技术[J]. 中国工程科学, 2002, 4(2): 86-91.
Zhao Chunsheng. Ultrasonic motor techniques for 21st century[J]. Engineering Science, 2002, 4(2): 86-91. (in Chinese)
[4] 姚志远,吴辛,赵淳生. 行波超声电机定、转子接触状态试验分析[J]. 振动、测试与诊断, 2009, 29 (4): 388-391.
Yao Zhiyuan, Wu Xin, Zhao Chunsheng. Test of contact interface properties of stator and rotor in travelling wave ultrasonic motors[J]. Journal of Vibration, Measurement & Diagnosis, 2009, 29 (4): 388-391. (in Chinese)
[5] 刘国嵩, 杨志刚, 曾平, 等. 新型压电步进式二维精密驱动器[J]. 光学精密工程, 2006, 14(4): 602-606.
Liu Guosong, Yang Zhigang, Zeng Ping, et al. Novel sophisticate stepping 2-DOF piezoelectric actuator[J]. Optics and Precision Engineering, 2006, 14(4): 602-606. (in Chinese)
[6] Sun Zhijun, Xing Rentao, Zhao Chunsheng, et al. Fuzzy auto-tuning PID control of multiple joint robot driven by ultrasonic motors[J]. Ultrasonics, 2007, 46(4): 303-312.
[7] 魏守水, 黄青华, 王鹏, 等. 基于模糊神经网络的超声电机位置控制[J]. 振动、测试与诊断, 2004, 24(3): 189-191.
Wei Shuoshui, Huang Qinghua, Wang Peng, et al. Position control of ultrasonic motor using fuzzy-neural networks[J]. Journal of Vibration, Measurement & Diagnosis, 2004, 24(3): 189-191. (in chinese)
[8] Izuno Y, Takeda R, Nakaoka M. New fuzzy reasoning-based high-performance speed/position servo control schemes incorporating ultrasonic motor[J]. Industry Applications IEEE Transactions on, 1992, 28(3): 613-618.
[9] Senjyu T, Kashiwagi T, Uezato K. Position control of ultrasonic motors using MRAC with dead-zone compensation[J]. Industrial Electronics IEEE Transactions on, 2001, 48(6): 1278-1285.
[10]史敬灼, 刘博. 行波超声电机极点配置自校正转速控制[J]. 中国电机工程学报, 2009, 12(30): 215-219.
Shi Jinzhou, Liu Bo. Self-tuning pole assignment speed control of travelling wave ultrasonic motor[J]. Proceedings of the CSEE, 2009,12(30):215-219. (in Chinese)
[11]李士勇,李巍.智能控制[M]. 哈尔滨:哈尔滨工业大学, 2011:5-25.
[12]刘会兵, 廖昌荣, 李锐, 等. 磁流变液悬置用于发动机隔振模糊控制[J]. 振动、测试与诊断, 2011, 31(1): 180-184.
Liu Huibing, Liao Changrong, Li Rui, et al. Application of magneto-rheological fluid mount to fuzzy control of engine vibration isolation[J]. Journal of Vibration, Measurement & Diagnosis,2011, 31(1):180-184. (in Chinese)
10.16450/j.cnki.issn.1004-6801.2016.04.029
国家自然科学基金重大研究计划资助项目(91223201);国家自然科学基金面上资助项目(51575260);南京航空航天大学科研基地创新创优基金资助项目(NJ20160001);江苏高校优势学科建设工程基金资助项目
2015-04-10;
2015-09-29
TP273; TH742
潘松,男,1978年10月生,讲师。主要研究方向为电机控制、压电精密驱动与控制技术。曾发表《超声电机驱动和疲劳寿命集成测控系统》(《振动、测试与诊断》2012年第32卷第6期)等论文。
E-mail:pansong@nuaa.edu.cn
猜你喜欢
军事文摘(2023年4期)2023-04-05 13:57:35
科普童话·学霸日记(2021年11期)2021-05-30 10:48:04
小读者(2021年2期)2021-03-29 05:03:20
智富时代(2019年4期)2019-06-01 07:35:00
测控技术(2018年4期)2018-11-25 09:47:22
汽车观察(2018年10期)2018-11-06 07:05:28
车迷(2017年10期)2018-01-18 02:10:46
北京汽车(2017年3期)2017-10-14 02:15:52
光学精密工程(2016年4期)2016-11-07 09:04:52
光学精密工程(2016年3期)2016-11-07 09:04:17
