履带轮椅机器人爬楼姿态控制的研究
2016-12-06 07:50:54曹鹏彬赵建宇汤旭青
武汉工程大学学报 2016年5期
曹鹏彬,赵建宇,汤旭青
武汉工程大学机电工程学院,湖北 武汉 430205
履带轮椅机器人爬楼姿态控制的研究
曹鹏彬,赵建宇,汤旭青
武汉工程大学机电工程学院,湖北武汉430205
提出一种采用履带结构的轮椅机器人方案,并对其爬楼姿态的控制方法进行研究.利用6轴运动传感器获取机体爬楼时的姿态数据,超声波传感器采集机体两侧的距离数据,根据轮椅机器人自身特点与实际经验,使用模糊PID(Proportion Integration Differentiation)算法设计出模糊自整定PID控制器.通过在MATLAB/SIMULINK下仿真,该控制器能将方向角稳定在预定角度,建立稳态时间为0.17 s,最大超调量不超过7.2%.实际试验中,方向角稳定在预设值±0.2°内,具有很好的控制效果,实现了爬楼过程中的自动控制.
履带轮椅机器人;爬楼姿态控制;模糊PID
1 引言
对有行动障碍需要使用轮椅的人群来说,生活中的楼梯成为一大障碍,传统轮椅已经无法满足要求,为了使其生活更加便利,设计出了能够爬楼梯的轮椅机器人.
在现有的研究成果中,有多种类型的爬楼机器,例如轨道式、行星轮式[1]、踏步式[2]、履带式等等,其中,行星轮式和踏步式均需要专人辅助才能完成正常爬楼动作,而轨道式和履带式能够自主运行.轨道式爬楼装置,需要预先安装固定轨道,灵活性差,适用范围窄.履带式爬楼轮椅[3]是目前应用较多的方案,其重心波动小,传动效率高,能沿着与楼梯台阶直角顶端连线相平行的直线运动,虽然其在爬楼时无需人为操控,但不加反馈的开环动力输出存在着很大的安全隐患,因为楼梯存在倾角,如果轮椅运动方向与楼梯延伸方向之间的夹角过大,会有倾覆的危险,也会因为偏离轨迹方向而撞到护栏,因此,迫切需要对其爬楼时的姿态进行控制.
针对这些问题,采用传感器获取轮椅机器人的运行姿态和位置,结合模糊控制与PID控制的优点,利用模糊PID自适应算法对其进行实时控制,使其运行方向与楼梯延伸方向保持相同,且维持其左右两侧的空隙处于一个安全的范围内,最终使轮椅机器人在楼梯上自动、安全、稳定的运行.
2 轮椅机器人的结构
结合现有各种轮椅的优缺点,提出一种履带结构的轮椅机器人方案,结构如图1所示,图中1为车架,履带机构由主履带5、副摆臂履带4组成,副履带作为摆臂,在爬楼时伸出,增加与楼梯面的接触面积.机器人在平地行走时只依靠驱动轮2、万向轮3,轮子由连杆机构带动与地面接触.爬楼时依靠轮、履的协同工作,履带接触楼梯的同时保持后驱动轮也接触台阶面,给底盘一个支撑力,可以防止由于重心不均导致底盘倾覆,此结构可以减少履带的长度,使得机器人的底盘更加小巧.
由于机器人底盘工作在非常态的环境,会产生一些固有的不稳定性因素[4]:履带速度差;重力不均;台阶面形状缺陷;外界干扰等,上述因素都会导致机器人底盘在行驶方向上产生较大的随机偏差以及累积误差,导致其可靠性、安全性能下降,发生危险.

图1 轮椅底盘结构图Fig.1Structure diagram of wheelchair chassis
当机器人底盘完全处于楼梯面上时,其姿态如图2所示,主、副履带与后驱动轮保持平直,均与台阶接触,在行进方向上增大了接触面积.在楼梯上移动过程中,系统使用MPU6050来解算其姿态,MPU6050是整合性6轴运动处理组件,可以实时检测底盘的角速度和加速度,由于MPU6050数据具有漂移的特征,所以加速度数据用来作为矫正,保证角速度数据稳定可靠.

图2 轮椅底盘爬楼状态图(a)二维示意图;(b)三维示意图Fig.2Climbing state diagram of wheelchair chassis(a)2D sketch;(b)3D sketch
三维状态下,机器人底盘的运动状态如图2(b)所示,φ、θ、ψ表示X、Y、Z三轴的转角,在三维空间中可以由四元数[5]来描述,通过角速度的转换得到四元数,微分方程如式(1)所示:
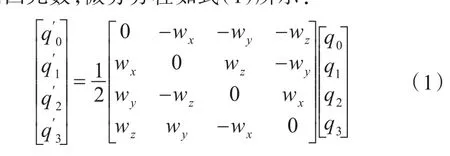
其中q0、q1、q2、q3为四元数的参数,ωx、ωy、ωz为角速度,将上式转化为角度关系式:

由式(2)可以确定轮椅底盘在楼梯面爬行时的姿态角度数据,φ和θ不参与控制,而对ψ进行模糊PID控制,一方面观察角度控制与否对最终效果的影响,另一方面从φ和θ可以看出机体运行的平稳性,观察干扰因素的存在情况.
3 PID控制器硬件设计
本文搭建了一套基于STM32的嵌入式控制系统[6],为了调试方便,采用无线的方式将PC机与嵌入式系统相连,形成一套完整的试验平台,该平台能实时获取轮椅底盘的运行数据,并在线修改参数,使得控制效果能同步反映,其结构如图3所示.

图3 试验平台结构框图Fig.3Structure diagram of test platform
控制器的硬件部分如表1所示,其中包括以STM32F4为核心的控制板,检测姿态、速度等信息的各类型传感器,2.4 GHz无线网络通讯模块.
设计的试验样机包括轮椅机器人底盘的机械结构与电气控制装置,该试验样机模型整备质量为4 kg,额定负载为20 kg.
图4为轮椅机器人底盘控制硬件结构图,主控芯片通过I2C总线、SPI总线、I/O口与外部传感器和模块相连.系统采集姿态检测传感器MPU6050与电子罗盘、编码器、超声测距仪3部分数据,分别形成3路闭环控制,如图5所示,与传统的单环控制相比较,多路闭环控制能保证更加精确的控制效果,抗干扰能力强,避免某个传感器出现问题后失去控制能力,提升了系统可靠性.

表1 控制器的硬件组成Tab.1Hardware components of controller

图4 硬件结构框图Fig.4Structure diagram of hardware framework
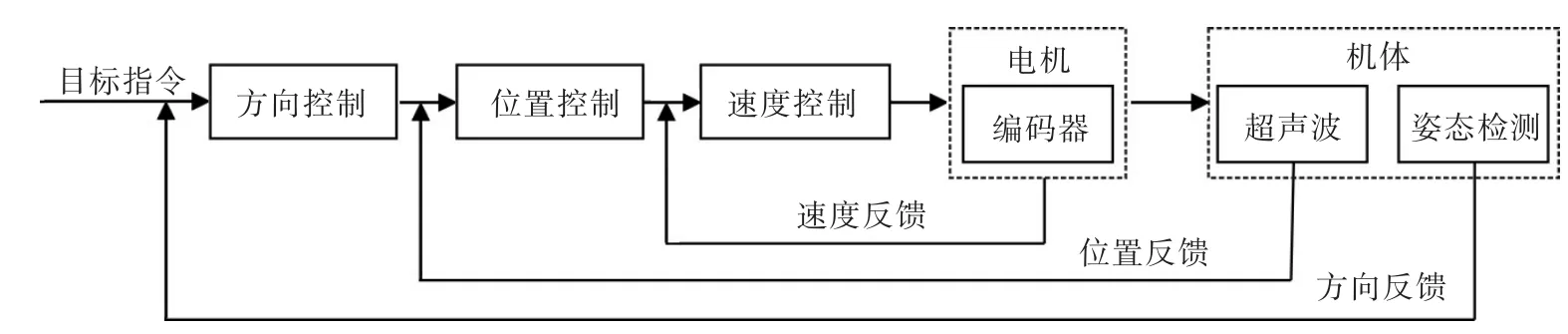
图5 闭环控制原理图Fig.5Principle diagram of closed-loop control
4 PID控制器算法设计
4.1模糊PID控制器设计
在方向导航的应用中,移动物体需要对实时的航向数据与目标之间的偏差E进行纠正.对于处在楼梯面上,依靠履带面接触的轮椅机器人底盘来说,建立精确的数学模型较为困难,无法抑制由于不稳定因素所带来的系统误差,抗干扰性差,而结合现代控制理论中的模糊自适应控制,能够在线识别姿态的特征参数,实时改变控制策略,使参数保持在合理的范围内.
控制器采用两输入,三输出的方式,规定机体的行走方向后,将当前方向与目标方向的误差E与误差变化率Ec为输入,经过控制器一系列的模糊化,去模糊化[7]之后,实时输出PID的3个参数,根据机体当前的姿态数据做出最合适的控制.
系统在不同的误差E和误差率Ec的值时,通过一系列模糊规则的处理,最终得出相应的修正系数kp,ki,kd,加入到当前的PID控制中,由于系统在运行过程中始终参与检查与运算,可以对参数进行在线修改[8],以满足不同的误差E和误差率Ec对控制参数的不同要求.本文对误差E的计算样本是来自多个传感器的值,根据不同值的稳定性情况设计不同的动态权重值,若是传感器发生故障,跳动较大,则相应减小其权重,维持计算值处于正常范围.
设系统中输入输出参数E、Ec、kp,ki,kd的模糊子集均为{NB,NM,NS,ZO,PS,PM,PB},子集中的7个元素分别表示负大、负中、负小、零、正小、正中、正大.5个输入输出参数论域均为[-3,3],其中{-3、-2、-1、0、1、2、3}7个点与模糊子集中的元素一一对应.取输入输出参数的隶属度函数均为三角形曲线.
模糊PID控制[9]的核心是根据相关的技术要求和实际操作经验,建立相应的模糊规则表,按照MATLAB格式转换成模糊规则,形式如下:
If(E is NB)and(Ecis NB)then(kp is PB)(ki is NB)(kd is PS)(1)
If(E is NB)and(Ecis NM)then(kp is PB)(ki is NB)(kd is NS)(1)
……
If(E is PB)and(Ecis PB)then(kp is NB)(ki is PB)(kd is PB)(1)
末尾的“1”为每条规则的权重值,根据模糊规则建立E,Ec两项输入,kp,ki,kd三输出的模糊控制器.
4.2模糊PID控制器仿真
在MATLAB中,SIMULINK工具箱[10]和模糊逻辑工具箱具有组件式的功能块,根据上述的控制原理,构建仿真模型系统.系统包含两大部分,分别是模糊处理部分和PID处理部分,结合传统PID和模糊控制,对系统进行动态仿真,如图6所示.

图6 SIMULINK仿真系统Fig.6SIMULINK simulation system
如图7、图8所示,采样时间定为1 ms,在控制系统开始后,能够在0.17 s内完成调节,最大超调量为7.2%,速度较快,反应迅速.

图7 控制系统阶跃响应曲线Fig.7Step response curve of control system

图8 控制器输出状态曲线Fig.8Output state curve of controller
为验证系统的抗干扰性能,在0.3 s时刻对系统施加1.0的干扰,如图7、图8所示,系统能迅速对干扰进行调节,将时间控制在0.8 s内,超调量小于3.3%,满足预期目标.
5 试验与结果分析
爬楼试验环境为一段两侧均有墙体的楼梯,具体相关的参数如表2所示.

表2 楼梯参数Tab.2Stairs parameters
试验的基本过程为:将轮椅机器人轮子收起,放在楼梯底端,只靠履带接触台阶凸起部分,通过2.4 GHz无线模块与PC上位机连接,发送运行指令后,轮椅机器人在楼梯上爬行,左右放置的超声波传感器实时检测两侧的距离,此数据作为MPU6050数据的参考值带入控制系统进行计算,机体运行到楼梯顶端时停止,记录并保存相关的数据,便于后期的分析.
图9所示为轮椅机器人在X,Y,Z轴方向上的姿态角数据,其中翻滚角φ和俯仰角θ不由系统所直接控制,反映的是轮椅机器人在运行状态时的平稳性,由图9可以看出图9(a)、(b)的跳动较小,不超过±0.35°.方向角ψ为机体的行进方向,由模糊PID控制算法控制,图9(c)所示,最大偏差不超过±0.2°,与图9(a)、(b)中不加控制的随机跳动相比,在行进方向上具有较好的控制效果.
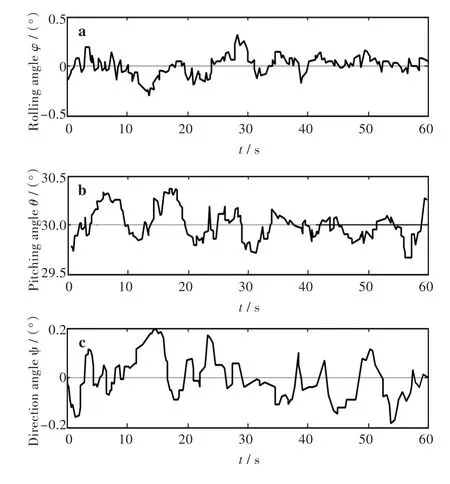
图9 机体姿态曲线(a)翻滚角;(b)俯仰角;(c)方向角Fig.9Posture curves of chassis(a)Rolling angle;(b)Pitching angle;(c)Direction angle
如图10所示,行进方向的垂直方向用X轴表示,图10中显示了轮椅机器人在运行时X轴上的位置误差以及控制结果,其中误差大部分落在(-0.02,0.02)范围内,最大不超过±0.3 m,控制效果较好.
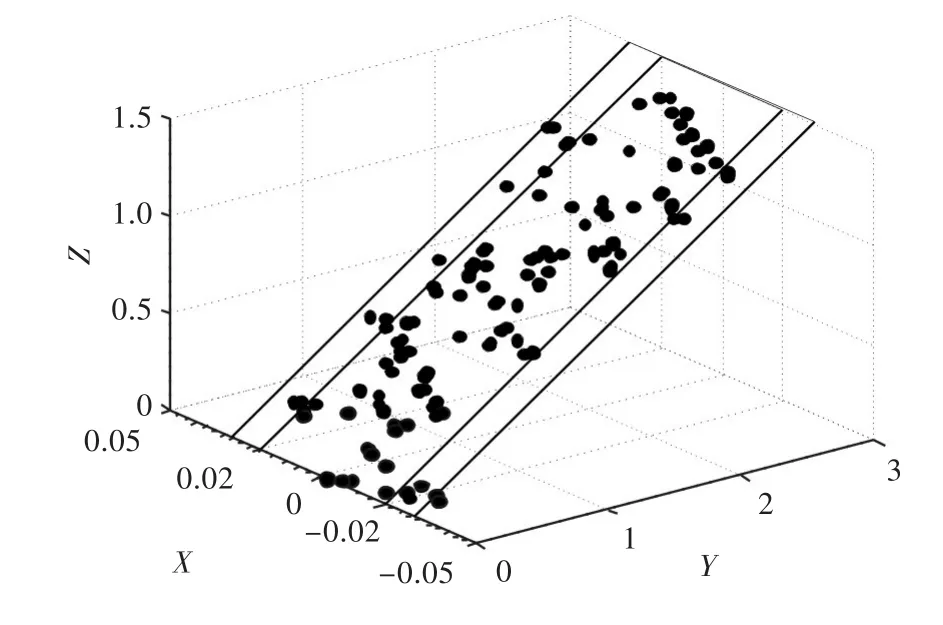
图10 x方向位移误差Fig.10Error of x direction displacement
为了验证该轮椅机器人能适应非直线型楼梯,设计了圆形楼梯模型,让其运行在带弧度的台阶上.
设计弧度值从0°到80°均匀增加,如图11所示,直线代表预期的方向变化,折线代表底盘实际运行时的方向变化,从图11(a)中可以看出,整个60 s的运行过程中,折线跳动较小,基本与直线重合,图11(b)为20 s到34 s内方向变化的局部放大图,图11中显示折线在基准直线上下振幅较小,实际运行效果与数据显示相符.
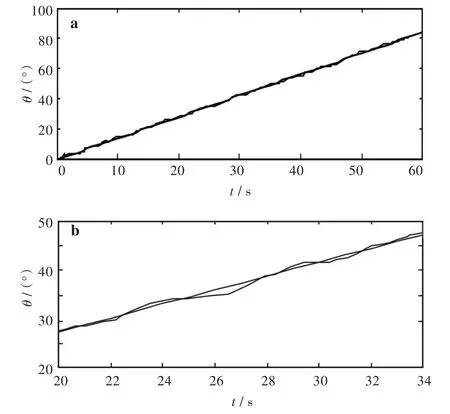
图11 弧形台阶运行曲线(a)完整曲线;(b)局部放大图Fig.11Performance curves of arc stair(a)Complete curve;(b)Magnification curve
6 结语
以上通过对轮椅底盘在爬楼状态情况下的运动分析,总结了对姿态影响的因素,设计了嵌入式控制平台,根据运动处理组件MPU6050与其他辅助传感器的实时数据,运用模糊PID算法对输出进行控制.搭建实验平台,通过MATLAB进行模糊PID算法的仿真实验,并在自行研制的轮椅底盘模型上进行了运动控制实验,能将方向偏差控制在±0.2°内,位移偏差稳定在±0.02 m范围内,控制效果优于常规的PID系统[11],验证了MATLAB下的仿真结论,具有较小的稳态误差,且能适应不同类型的楼梯面,通用性好.
[1]CHARLES J M.Robotic lifesaver-vecna's humanoid robot can walk,run,lift heavy objects,and climb stairs on its track-powered,jointed legs[J].Design news,2006,61(16):46-48,50.
[2]DONGKYUC,JONGKYUNO,JONGWONK. Analysis method of climbing stairs with the rocker-bogie mechanism[J].Journal of mechanical science and technology,2013,27(9):2783-2788.
[3]孟晓东.轮履组合式电动爬楼轮椅的研究[D].长春:长春理工大学,2013.
[4]莫海军,朱文坚.履带式移动机器人越障稳定性分析[J].机械科学与技术,2007,26(1):65-67. MO H J,ZHU W J.Analysis of the stability of a crawler-typemobilerobotcrossingoverobstacles[J].Mechanical science and technology for aerospace engineering,2007,26(1):65-67.
[5]王茂永.下肢康复机器人感知系统设计与研究[D].成都:电子科技大学,2014.
[6]廖煜雷,万磊,庄佳园.喷水推进型无人水面艇的嵌入式运动控制系统研究[J].高技术通讯,2012,22(4):416-422. LIAO Y L,WAN L,ZHUANG J Y.An embedded motion control system for water-jet-propelled unmanned surface vehicles[J].Chinese high technology letters,2012,22(4):416-422.
[7]刘渊,周旺平.基于DSP的斜轴式望远镜机架控制系统设计[J].计算机测量与控制,2014,22(11):3572-3575. LIU Y,ZHOU W P.Design of oblique axis telescope mount system controller based on DSP[J].Computer measurement&control,2014,22(11):3572-3575,3580.
[8]尤洋,文小玲,邹艳华.一种无线温度监控系统的设计与实现[J].武汉工程大学学报,2015,37(1):30-34. YOU Y,WEN X L,ZHOU Y H.Design of wireless temperature monitoring system based on zigbee[J]. Journal of Wuhan institute of technology,2015,37(1):30-34.
[9]储岳中,陶永华.基于MATLAB的自适应模糊PID控制系统计算机仿真[J].安徽工业大学学报(自然科学版),2004,21(1):49-52. CHU Y Z,TAO Y H.Computer simulation of the self-adaptive fuzzy PID control system based on matlab[J].Journal of Anhui university of technology(Natural Science),2004,21(1):49-52.
[10]侯喜茹,柳贡慧,梁景伟.基于Matlab/Simulink模糊工具箱的井眼轨迹模糊控制仿真[J].石油学报,2006,27(3):108-111. HOU X R,LIU G H,LIANG J W.Fuzzy control simulation of wellbore trajectory based on matlab/ simulink fuzzy tool box[J].Acta petrolei sinica,2006,27(3):108-111.
[11]杨世勇,徐国林.模糊控制与PID控制的对比及其复合控制[J].自动化技术与应用,2011,30(11):21-25. YANG S Y,XU G L.Comparison and composite of fuzzy control and PID control[J].Techniques of automation and applications,2011,30(11):21-25.
本文编辑:陈小平
Stair-Climbing Attitude Control of Tracked Wheelchair Robot
CAO Pengbin,ZHAO Jianyu,TANG Xuqing
School of Mechanical and Electrical Engineering,Wuhan Institute of Technology,Wuhan 430205,China
A structural scheme of tracked robot was proposed and the control method of the stair-climbing attitude was studied.A 6-axis motion sensor was employed to acquire the attitude data of the robot in the process of climbing stairs.In addition,supersonic sensors were installed to acquire the distance data on both sides of the robot body.According to the robot characteristics and practical experience,a kind of fuzzy self-tuning proportion integration differentiation(PID)controller was devised using fuzzy PID algorithm.A simulation by the tool of MATLAB/SIMULINK was performed,in which the controller could be stabilized at a predetermined angle in 0.17 s and the maximum overshoot was less than 7.2%.The direction angle was keeping with in±0.2° of the preset value and the automatic control of the tracked wheel chair robot climbing stairs was realized with good effect in the practical experiments
tracked wheelchair robot;stair-climbing attitude control;fuzzy-PID
TP242.6
A
10.3969/j.issn.1674⁃2869.2016.05.014
1674-2869(2016)05-0484-06
2016-03-06
湖北省教育厅科学技术研究项目(D20141502);武汉工程大学研究生教育创新基金(CX2014035)
曹鹏彬,博士,副教授.E-mail:caopengbin@wit.edu.cn
猜你喜欢
祝您健康(2024年3期)2024-03-03 13:27:39
中学生数理化·八年级物理人教版(2023年4期)2023-05-05 07:29:32
中国石油石化(2021年8期)2021-03-30 12:39:14
石油化工建设(2019年6期)2020-01-16 08:03:42
机械设计与制造(2018年2期)2018-03-05 12:33:02
青岛画报(2018年1期)2018-02-23 12:07:50
方圆(2017年24期)2018-01-17 20:55:33
学习月刊(2016年19期)2016-07-11 01:59:38
专用汽车(2016年4期)2016-03-01 04:14:20
汽车维修与保养(2015年6期)2015-04-17 03:31:48