
基于无线通讯的物体运动轨迹测量仪的设计
2016-12-06 08:43杨利容
电子测试 2016年21期
唐 峰,杨利容,高 旺
(1.衡阳师范学院南岳学院物理与电子信息科学系,湖南衡阳,421008;2.衡阳师范学院物理与电子工程学院,湖南衡阳,421008)
基于无线通讯的物体运动轨迹测量仪的设计
唐 峰1,杨利容2,高旺1
(1.衡阳师范学院南岳学院物理与电子信息科学系,湖南衡阳,421008;2.衡阳师范学院物理与电子工程学院,湖南衡阳,421008)
运动轨迹检测仪在行走距离估计、导航系统、人机交互等领域具有广泛的应用。该论文以STM32F103单片机、NRF24L01无线通讯模块、MPU-6050运动传感器、HMC5883电子罗盘、TFTLCD液晶屏等模块,设计一种可无线测量物体运动轨迹的仪器。通过运动传感器采集的加速度和偏转角度α,以及电子罗盘采集的偏转角度θ,利用无线模块传递采集数据,然后将数据进行角度修正,采用适当的数据融合算法,欧拉角法描述物体坐标系相对于地理坐标系的空间角位置关系,能精准计算物体每一时刻的速度和位移,然后通过液晶显示,可观察到物体每一时刻的运动状态。将获取的运动状态数据通过串口发送至PC机,用Matlab仿真软件获取物体的运动轨迹图形。
陀螺仪;加速度传感器;电子罗盘;无线轨迹测量仪
0 引言
对运动轨迹测量系统来说,采用外部检测的方法精度很高,但是成本也相对较高,而且通常受制于外部条件,如GPS不能在室内使用,图像视觉技术需要良好的拍摄角度、充足的光线等。本文研究的无线物体运动轨迹测量系统与外部观测系统相比,本文具有不依赖于各种外部检测系统,也不受任何外部条件的影响。采集数据较为简单,不需要用户参与,也不需要任何其他设备配合,具有完全的自主性。且成本廉价,体积小巧,可以集成到手机、平板电脑等小型设备中,对于普通用户来说非常方便。本轨迹测量系统在计算机科学领域有着广泛的应用,3D游戏手柄、空中手写笔、三维无线鼠标、导航系统、运动轨迹测量、振动检测、弹道检测、步态识别、手势识别等。
1 硬件电路设计
轨迹测量仪分下位机和上位机两部分,硬件结构如图1所示,下位机主要包括单片机、运动传感器、电子罗盘、无线收发、液晶显示、存储单元;上位机为PC机。运动传感器包括陀螺仪和加速度传感器,分别对物体运动过程中产生的角速度信号和加速度信号采集;电子罗盘负责角度采集,对物体定位航行方向;运动传感器和电子罗盘将获取的信号传送给单片机并经无线发送模块发送;无线接收模块接收到信号后传送至主控单片机,并将数据存储于存储单元,单片机获取信息后由软件实现数据的处理和图像轨迹的绘制并将其传送给PC机。
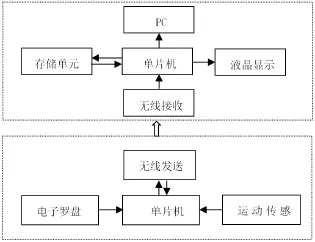
图1 整体结构框图

图2 运动传感器电路

图3 电子罗盘电路
1.1单片机控制电路
采用STM32系列单片机作为系统的主控制器,STM32具有高速、低功耗、超强抗干扰优点,内部主系统时钟72MHz,相比其他单片机处理数据要快很多。由于STM32内部集成很多硬件功能,例如本系统将会用到STM32内部SPI和IIC硬件接口以及FSMC静态存储器功能,因此可以加快数据通信速度,还可以省去很多外围硬件电路,使得电路简单易行。
1.2传感器模块
MPU6050是全国首列9轴运动处理传感器。它集成了3轴MEMS陀螺仪,3轴MEMS加速度计,以一个可扩展的数字运动处理器DMP(Digital Motion Processor),可用I2C连接一个第三方向的数字传感器。扩展后可以通过其I2C或SPI接口输出9轴信号。MPU6050也可通过其I2C接口连接非惯性的数字传感器。MPU6050对陀螺仪和加速度计分别用三个16位的ADC,将其测量的模拟量转化为可输出的数字量。为了精确跟踪快速和慢速的运动,传感器的测量范围都是用户可控的,陀螺仪可测量范围为±250,±500,±1000,±2000°/秒(dps),加速度计可测量范围为±2,±4,±8,±16g,MPU6050运动传感器电路如图2所示。MPU-6050运动传感器外部扩展一个三维的HMC5883电子罗盘,构成一个9轴运动传感器。HMC5883是一种表面贴装的高集成模块,并带有数字接口的弱磁传感器芯片,应用于低成本罗盘和磁场检测领域。HMC5883L包括最先进的高分辨率 HMC118X 系列磁阻传感器,并附带霍尼韦尔专利的集成电路包括放大 器、自动消磁驱动器、偏差校准、能使罗盘精度控制在1°~2°的12位AD转换器,简易的I2C系列总线接口。HMC5883电子罗盘电路如图3所示。
1.3NRF24L01无线收发电路
NRF24L01是NORDIC公司生产的一款无线通讯芯片,采用FSK调制,内部集成 NORDIC自己的 Enhanced Short Burst协议。该模块既可以作为发送数据又可以作为接收数据,作为接收数据时,可以分为6个接收通道,通过写不同的命令可以分别接收任意通道数据。还有两种工作模式,一种是增强型 ShockBurst TM,另一种是ShockBurst TM 模式。NRF24L01支持SPI通信操作,NRF24L01无线收发电路如图4所示。
1.4上位机串口电路
串口电路采用的是CH340的USB总线转接芯片,它能实现USB转串口、USB转IrDA红外或者USB转打印口。 在串口方式下,CH340提供常用的MODEM联络信号,用于为计算机扩展异步串口,或者将普通的串口设备直接升级到USB总线。本电路采用CH340G作为单片机的RS232串口通信,该电路外围电路简单,供电电压3.3V-5V,单片机供电电源使用的是USB供电,以及程序下载也可以使用串口下载。USB串口电路如图5所示。该芯片支持RS232通信,在本电路中芯片的3、4引脚是是连接单片机的串口,5、6引脚连接是电脑的USB串口。

图4 NRF24L01无线收发电路

图5 上位机串口电路
2 软件设计
整个系统软件部分分为下位机和上位机两部分。下位机程序流程主要包含单片机功能模式配置、运动传感器的数据采集、数据的处理、无线传输、数据存储、液晶显示;上位机程序流程主要包括MATLAB的GUI串口界面设计、串口通信、数据处理、图像绘制。下位机初始化程序主要包括各模块的初始化,单片机初始化I/O口初始化、中断初始化、内部硬件SPI和IIC通讯初始化、FSMC初始化等;上位机初始化程序包括MATLAB串口的窗口界面初始化和串口通信初始化。
3 总结
通过实验验证,该无线轨迹测量仪能还原物体运动轨迹,并可观察到物体每时刻的运动状态。将运动轨迹测量的理论更多与实际应用结合,如人体运动测量,三维无线鼠标、振动检测、弹道检测、步态识别等。由于测量精度往往与成本成反比,而实际应用中对精度和成本的要求不尽不同,可以充分的挖掘其中蕴藏的实际价值。
[1] 杨续伟.基于微惯性组合的嵌入式航姿参考系统研究[D].上海交通大学,2012.
[2] 杨业飞,申文涛.惯性稳定平台中陀螺技术的发展现状和应用研究[J].飞航导弹,2011,(02):72-79.
[3] 孙书鹰,陈志佳,寇超.新一代嵌入式微控制器STM32F103开发与应用[J].微型计算机应用,2010,31(12):59-63.
[4] 周红进,钟云海,易成涛.MEMS惯性导航传感器[J].舰船科学术,2014,(1):122-126.
[5] 林乾浩,钱正洪,龚天平等.基于GMR传感器的三轴电子罗盘[J].机电工程,2013,(05):55-59.
[6] 余星.基于捷联惯性的水下载体姿态检测系统研制[D].杭州电子科技大学,2013.
[7] 李莎,谭永丽.,基于NRF24L01的无线数据传输系统设计[J].湖北第二师范学院学报,2011,28(2) : 109-111.
[8] 兰红莉,基于MATLAB的PC机与单片机串行通信实现[J]计算机应用与软件.2006.23(6):73-76
the Design of Object Trajectory Measuring Instrument Based on Wireless Communication
Tang Feng1,Yang Lirong2, Gao wang1
(1.Department of Physics and Electronics Information Science,Hengyang Normal University School of Nanyue,Hengyang Hunan,421008,China;2.Institute of Physics and Electronic Engineering,Hengyang Normal University,Hengyang Hunan,421008,China)
The trajectory measuring instrument in walking distance estimation,navigation systems, humancomputer interaction and other fields has wide applications.This paper with STM32F103 microcontroller, wireless NRF24L01 wireless communication module,the MPU - 6050 motion sensors,HMC5883 electronic compass and TFTLCD LCD modules,designs a kind of instrument which has the function of wireless measurement object vtrajectory.The measuring instrument by motion sensors and electronic compass for the acceleration of the object,the deflection Angle information,transfer data through wireless module,then to amend the data ,using the appropriate data fusion algorithm and euler angles method to describe the object coordinate system relative to the geographical coordinate system angular position in the relationship,The instrument can accurately calculate the object speed and displacement and,the state of objects in the liquid crystal display (LCD)that can be observed each time.After the data of motion state are sent to the PC in the serial port, the object trajectory graphics are depicted with the MATLAB simulation software.
Gyroscope;Acceleration sensor;Electronic compass;Wireless trajectory measuring instrument
湖南省大学生研究性学习和创新性实验计划项目NYD201502衡阳市科技局科技计划项目2014KG83湖南省大学生研究性学习和创新性实验计划项目cx1508衡阳师范学院省级平台开放基金项目GD14K17
杨利容(1974-),女,湖南常德人,衡阳师范学院物理与电子工程学院,讲师,硕士,主要从事网络滤波器理论与应用研究
猜你喜欢
科技进步与对策(2022年16期)2022-08-30
装备制造技术(2020年11期)2021-01-26
衡阳师范学院学报(2020年1期)2020-05-18
音乐教育与创作(2019年8期)2019-05-16
电子制作(2018年19期)2018-11-14
作文·初中版(2017年2期)2017-03-06
通信电源技术(2016年4期)2016-04-04
通信电源技术(2016年5期)2016-03-22
职业技术(2015年8期)2016-01-05
新闻传播(2015年9期)2015-07-18
