
室内可见光成像传感器定位系统的理论极限
2016-12-06 07:58:46林基明
西安电子科技大学学报 2016年4期
赵 响,林基明
(1.西安电子科技大学通信工程学院,陕西西安 710071;2.桂林电子科技大学广西无线宽带通信与信号处理重点实验室,广西桂林 541004;3.桂林电子科技大学广西信息科学实验中心,广西桂林541004)
室内可见光成像传感器定位系统的理论极限
赵 响1,2,林基明2,3
(1.西安电子科技大学通信工程学院,陕西西安 710071;2.桂林电子科技大学广西无线宽带通信与信号处理重点实验室,广西桂林 541004;3.桂林电子科技大学广西信息科学实验中心,广西桂林541004)
针对室内可见光定位系统的参数优化问题,计算了基于成像传感器接收的接收机位置的估计理论极限,求出了估计量的克拉美罗下界.对于室内典型的应用场景,当接收机的成像点测量值受高斯白噪声影响时,计算出接收机位置的最大似然估计量,并推出克拉美罗下界.采用LED发射机和成像传感器接收机的真实参数进行数值仿真,结果表明:可实现精确的定位估计,定位精度一般处于毫米量级.定位误差取决于接收机距房顶的垂直距离、透镜焦距、成像传感器的像素大小以及帧速率等参数.
可见光;室内定位系统;克拉美罗界;最大似然估计;成像传感器
随着固态照明技术的发展,发光二极管(Light Emitting Diode,LED)得到广泛应用[1-2].相比于白炽灯和荧光灯等光源,LED的寿命长、功耗低,是一种绿色能源.目前,基于LED的研究方向主要分为两大类:一是可见光通信,一是可见光定位.
对于可见光通信而言,LED的固有特点决定了其可以实现高速通信.首先,可见光通信是在照明的基础上实现通信的,要保证足够的光照强度,一般要求400~1 000 lx[3],从而保证通信过程中可以达到较高的信噪比.其次,LED的辐射光谱在400~790 THz,光谱宽度约390 THz,根据香农公式,可实现的信道容量非常大.目前,基于LED的可见光通信研究,围绕着提高系统传输速率的目标,研究方向主要集中在如何提高LED的调制带宽、复杂的调制技术[4]以及新型的复用技术[5]等方面.文献[6]利用Gallium Nitrideμ型LED,通过均衡和滤波技术提高调制带宽,以及正交频分复用(Orthogonal Frequency Division Multiplexing,OFDM)调制方式实现了3 Gbit/s的实验室通信速率,是迄今为止利用单个LED实现的最高速率.
对于可见光定位而言,根据接收端所采用器件的不同,分为基于光电二极管(Photo Diode,PD)的可见光定位和基于成像传感器(Image Sensor,IS)的可见光定位.基于光电二极管的可见光定位,对光束的方向性约束强,如果光电二极管离开白光LED的辐射范围,或者光电二极管翻转或移动,则可见光定位将失效,因此鲁棒性差.已有的基于光电二极管的可见光定位方法,首先获得与接收机位置有关的参数,如接收信号强度(Received Signal Strength,RSS)、到达时间(Time Of Arrival,TOA)、到达时间差(Time Difference Of Arrival,TDOA)、到达相位(Phase Of Arrival,POA)、到达相位差(Phase Difference Of Arrival,PDOA)或者其中两个或多个参数组合,然后利用这些参数,基于三边定位方法确定接收机位置.但是,对于在蓝光LED上覆淡黄色荧光粉的白光LED而言,定位精度受LED调制带宽的限制[7],淡黄色荧光粉涂层的响应速度慢,导致白光LED的调制带宽只有2 MHz.
由于光电二极管只能检测入射光的强度,而成像传感器除了可以检测入射光的强度外,还可以精确检测入射光的到达角(Angle Of Arrival,AOA).成像传感器由多个像素组成,每个像素可以看成一个光电二极管,因此成像传感器利用光源(如果进行可见光通信,则称为信源)成像点的不同可以空间分离多个不同的光源.到目前为止,基于成像传感器的可见光定位研究所发表的论文大多集中在应用研究领域,如用于智能交通系统[8]以及室内导航系统[9]等,这表明基于成像传感器实现精确的定位是可能的.但是,很少有文章分析基于成像传感器的可见光定位系统的理论极限,而该理论极限的确定将指引基于成像传感器的可见光定位系统的参数优化问题.
1 系统描述
图1所示的基于成像传感器的可见光定位系统模型中,存在3个坐标系,分别是三维的world坐标系、三维的camera坐标系以及二维的image sensor平面坐标系.室内房顶上任意LED光源Pi,i=1,2,…,N,经透镜中心在image sensor平面上成像,成像点为pi,i=1,2,…,N.
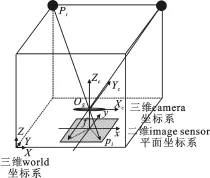
图1 基于成像传感器的可见光定位系统模型
LED光源的world坐标Pi=(Xi,Yi,Zi)T已知,光源在image sensor平面上的成像点pi=(xi,yi)T可测.但是,成像点的测量值受多种噪声影响[10].当散粒噪声和热噪声占主要地位时,可将系统噪声视为高斯白噪声.因此,笔者的目标是在成像点的观测值受高斯白噪声影响的情况下,对接收机(内置成像传感器)进行位置估计,并计算估计的克拉美罗下界(Cramer-Rao Lower Bound,CRLB).
假设接收机中心,即相机中心或透镜中心OS,在三维world坐标系中的坐标OS=(XS,YS,ZS)T,接收机距地板的垂直高度ZS保持不变,则接收机距房顶的垂直高度h=Zi-ZS可计算.对接收机中心在三维world坐标系中的坐标OS进行估计,并计算估计的克拉美罗下界.
光源Pi的坐标从world坐标系到camera坐标系的变换满足

其中,R为从world坐标系到camera坐标系的旋转矩阵,是3×3的正交单位矩阵;Pci=(Xci,Yci,Zci)T,i=1,2,…,N,是光源Pi在三维camera坐标系中的坐标.
在camera坐标系下,光源Pi与其对应的成像点pi之间满足透镜成像的牛顿公式:

其中,f为透镜的焦距.整理式(1)和(2),并考虑高斯白噪声的影响,且world坐标系与camera坐标系方向相同(即旋转矩阵R=E,E为单位阵),从而得出LED光源及其成像点观测值之间的数学关系为

2 最大似然估计

对数似然函数关于参数XS的一阶偏导数为

令∂ln(XS,YS)∂XS=0,可求出参数XS的最大似然估计值为

同理,对数似然函数关于参数YS的一阶偏导数为

令∂ln(XS,YS)∂YS=0,可求出参数YS的最大似然估计值为

3 克拉美罗下界
克拉美罗下界提供了无偏估计的均方误差所能达到的绝对下限.为了更好地说明估计方法的性能,可将其与克拉美罗下界进行比较.由式(5)和(7)知,对数似然函数一阶偏导的数学期望等于零,因此满足克拉美罗下界存在的“正则”条件[11],所以最大似然估计是最小方差无偏估计,且是有效的.
要得到参数矢量r=(XS,YS)T的克拉美罗下界,首先需计算2×2的Fisher信息矩阵I(r).求对数似然函数关于参数XS、YS的二阶偏导数,并取负的数学期望,从而求出I(r):

然后,对Fisher信息矩阵I(r)求逆,得I-1(r).未知参数的克拉美罗下界分别对应I-1(r)的对角元素,即var(ri)≥[I-1(r)]ii,i=1,2.因此,在成像点的观测值受高斯白噪声影响的情况下,参数矢量r=(XS, YS)T的克拉美罗下界分别为

由式(11)知,接收机位置的克拉美罗下界与所用LED光源个数N、透镜焦距f、接收机距房顶的垂直高度h以及高斯白噪声的方差σ2有关.对基于成像传感器的室内可见光定位系统而言,噪声方差σ2受多种因素的影响,如总接收光功率、成像传感器的像素大小以及帧速率等.
下面,重点分析影响噪声方差σ2的各个参数.
3.1成像传感器的总接收光功率

3.2成像传感器的接收面积
考虑一个LED经透镜在成像传感器上的成像问题,如图2所示.如果一个LED直径为L,其成像直径为l,透镜焦距为f,LED与透镜之间的垂直距离(物距)为h,则根据牛顿公式,有l=fLh.当LED距透镜某个距离dc时,LED的成像刚好落在一个像素内,称该距离为临界距离dc.如果h≥dc,LED的成像在且只能在一个像素内,设一个像素宽度为w,则此时成像传感器的接收面积A=w2;如果h<dc,则LED的成像将落在多个像素内,此时接收面积A=l2=(f Lh)2.
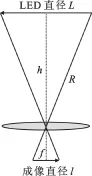
图2 一个LED在成像传感器上的成像
3.3噪声方差
成像传感器的噪声[10]主要分为两大类:一类是随机噪声,一类是固定模式噪声.固定模式噪声通过人眼可以直接在图像上观察到,是一种空间噪声分布形式,不随图像每帧的变化而变化.固定模式噪声对图像质量的影响远远大于随机噪声,但可以通过相关双采样技术、平场校正技术等有效地抑制和消除,因此笔者将不再考虑固定模式噪声对可见光定位系统的影响.随机噪声的量化值随图像每帧的变化而变化,遵循统计学上的分布,通常利用连续帧取平均的算法来减小,但因无法实现连续取无穷帧,因此并不能完全消除.随机噪声主要包括感光像素噪声和读取电路噪声.感光像素噪声主要是因入射光引起的散粒噪声;感光信息读取电路噪声主要包括复位噪声、放大器噪声等与入射光无关的电子噪声,属于热噪声.当散粒噪声和热噪声占主要地位时,可将系统噪声视为高斯白噪声.因此,笔者重点考虑散粒噪声和热噪声,忽略其他噪声,此时系统噪声方差
3.3.1散粒噪声
散粒噪声是由入射光引起半导体中载流子的随机变化而产生的.当光生载流子数量较大时,散粒噪声可视为高斯白噪声.基于成像传感器的可见光定位系统中,散粒噪声主要由3部分构成:观测点LED在接收机处产生的量子噪声;②干扰光源(其他LED光源)产生的量子噪声;③其他背景光源(荧光灯、白炽灯或太阳等)产生的噪声.与基于光电二极管的可见光定位不同的是,房顶上多个LED光源在成像传感器接收机上的成像是可分辨的,即干扰光源产生的噪声很小,因此,可以将其他LED光源产生的噪声视为背景噪声.散粒噪声的方差表示为

其中,q是电荷数,ρ是光电转换系数,Pr是成像传感器的总接收光功率,Pn是成像传感器单位面积上的背景光噪声功率;Atotal是成像传感器的总接收面积,Atotal=NA,N是所用光源个数,A对应单个LED的成像传感器接收面积;I2是噪声带宽因子,一般I2=0.562;Rb是数据速率.
3.3.2热噪声
热噪声是由带电粒子的布朗运动引起的.成像传感器光电二极管的复位噪声以及像素输出到位线上的输出噪声都可以概括为热噪声.热噪声也可视为高斯白噪声,方差,其中ia为像素单元后的列放大器电流,Ba为放大器的等效带宽.
4 仿真实验和结果
LED参数设置如下:LED直径L=6 mm,单个LED发送光功率Pt=100 m W.成像传感器采用Basler Pilot piA640,相关参数的标称值设置如下:帧速率fs=1 000帧/秒(fps),透镜焦距f=21 mm,像素宽度w=7.1μm,分辨率为640×480像素,接收机视场为70°.此外,假设光电转换系数ρ=0.4 m A/m W,像素单元后的列放大器电流ia=20×10-6m A,放大器的等效带宽Ba=4.5×106Hz.
首先,分析物距h对克拉美罗下界的影响.当LED直径L=6 mm,相机焦距f=21 mm,像素宽度w=7.1μm时,临界距离dc=17.7 m.改变物距的大小,观察克拉美罗下界的变化趋势.如图3所示,随着物距h的增大,克拉美罗下界越来越高,定位精度越来越差.当物距小于临界距离时,随着物距的增大,克拉美罗下界曲线急剧恶化,这是因为此时克拉美罗下界受物距的影响较大;当物距超过临界距离后,克拉美罗下界曲线变化幅度较小,这是因为此时克拉美罗下界受像素大小的影响较大.即使是最坏的情况,当物距h=25 m时,其定位误差也只有2.8 mm,因此定位精度非常高.
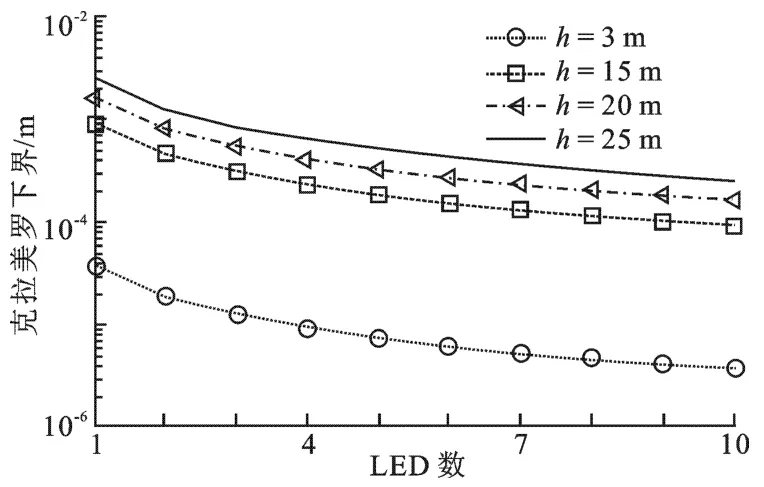
图3 物距对克拉美罗下界的影响
图4 像素宽度对克拉美罗下界的影响
然后,分析像素大小对克拉美罗下界的影响.当成像传感器的焦距f=21 mm且固定的情况下,依次改变像素宽度w的大小,观察克拉美罗下界随成像传感器分辨率变化的情况.如图4所示,随着像素宽度w的增大,克拉美罗下界越来越高,定位精度越来越差.也就是说,随着成像传感器分辨率的增加,定位精度越来越高.
最后,分析成像传感器的帧速率对克拉美罗下界的影响.可见光通信系统中接收机的采样速率fs=2Rb,即采样速率等于成像传感器的帧速率.成像传感器的帧速率一般约30帧/秒,从而限制了数据传输速率;另一方面,成像传感器的帧速率越低,噪声功率越小,定位精度也越高.如图5所示,随着成像传感器的帧速率的降低,克拉美罗下界曲线越来越低,定位精度越来越高.但是,帧速率的降低,限制了可达到的数据传输速率.
5 总 结
针对室内典型场景,计算了基于成像传感器的接收机位置估计的理论极限,求出了估计量的克拉美罗下界.当接收机的成像点测量值受高斯白噪声的影响时,求出接收机位置的最大似然估计量,推出估计量的克拉美罗下界,从而为可见光定位系统的参数优化问题奠定基础.采用典型LED发射机和成像传感器接收机的真实参数进行数值仿真,结果表明:可实现非常精确的定位估计,定位误差一般处于毫米量级.定位误差与所用发射机数目、透镜焦距、接收机距房顶的垂直距离、成像传感器的像素大小以及帧速率等参数有关.

图5 成像传感器的帧速率对克拉美罗下界的影响
[1]赵小明,周筱媛,张建奇,等.LED显示屏虚拟组合像素的分析[J].西安电子科技大学学报,2012,39(4):178-183. ZHAO Xiaoming,ZHOU Xiaoyuan,ZHANG Jianqi,et al.Analysis of the Combined-virtual Pixels in LED Displays [J].Journal of Xidian University,2012,39(4):178-183.
[2]段猛,郝跃.Ga N基蓝色LED的研究进展[J].西安电子科技大学学报,2003,30(1):60-65. DUAN Meng,HAO Yue.The State of Arts for Ga N-based Blue-light-emitting Diodes[J].Journal of Xidian University, 2003,30(1):60-65.
[3]KARUNATILAKA D,ZAFAR F,KALAVALLY V,et al.LED Based Indoor Visible Light Communications:State of the Art[J].IEEE Communications Surveys&Tutorials,2015,17(3):1649-1678.
[4]GAO Q,WANG R,XU Z Y,et al.DC-informative Joint Color-frequency Modulation for Visible Light Communications [J].Journal of Lightwave Technology,2015,33(11):2181-2188.
[5]HUANG W,GONG C,XU Z Y.System and Waveform Design for Wavelet Packet Division Multiplexing-based Visible Light Communications[J].Journal of Lightwave Technology,2015,33(14):3041-3051.
[6]TSONEV D,CHUN H,RAJBHANDARI S,et al.A 3Gb/s Single-LED OFDM-based Wireless VLC Link Using a Gallium NitrideμLED[J].IEEE Photonics Technology Letters,2014,26(7):637-640.
[7]WANG T Q,SEKERCIOGLU Y A,NEILD A,et al.Position Accuracy of Time-of-Arrival Based Ranging Using Visible Light With Application in Indoor Localization Systems[J].Journal of Lightwave Technology,2013,31(20): 3302-3308
[8]TAKAI I,HARADA T,ANDOH M,et al.Optical Vehicle-to-Vehicle Communication System Using LED Transmitter and Camera Receiver[J].IEEE Photonics Journal,2014,6(5):7902513.
[9]HARUYAMA S.Advances in Visible Light Communication Technologies[C]//2012 38th European Conference and Exhibition on Optical Communications.Piscataway:IEEE,2012:1-3.
[10]GOW R D,RENSHAW D,FINDLATER K,et al.A Comprehensive Tool for Modeling CMOS Image-sensor-noise Performance[J].IEEE Transactions on Electron Devices,2007,54(6):1321-1329.
[11]KAY S M.Fundamentals of Statistical Signal Processing,Volume I:Estimation Theory[M].Englewood Cliffs: Prentice-Hall,1993.
(编辑:郭 华)
Theoretical limit of the indoor visible light-image sensor positioning system
ZHAO Xiang1,2,LIN Jiming2,3
(1.School of Telecommunication Engineering,Xidian Univ.,Xi’an 710071,China;2.Guangxi Key Lab.of Wireless Wideband Communication and Signal Processing,Guilin Univ.of Electronic Technology, Guilin 541004,China;3.Guangxi Experiment Center of Information Science,Guilin Univ.of Electronic Technology,Guilin 541004,China)
To guide the optimization problem of the parameters in the image sensor-based visible light positioning system,theoretical limits on the location estimation of the receiver are calculated by deriving the Cramer-Rao Lower Bound(CRLB).For typical indoor scenes,the observations of the image points at the receiver are affected by the Gaussian white noise,the maximum likelihood estimation(MLE)for the location of the receiver is calculated,and the CRLB for the MLE is derived.By using the real parameters of the location are achievable,with positioning error usually in the order of millimeters.The positioning error depends on the number of transmitters,the focal length of the lens,the vertical distance from roof to receiver,the pixel size and the frame rate of the image sensor.
visible light;indoor positioning systems;Cramer-Rao bounds;maximum likelihood estimation;image sensor
TN911
A
1001-2400(2016)04-0063-06
10.3969/j.issn.1001-2400.2016.04.012
2015-05-06 网络出版时间:2015-10-21
国家自然科学基金资助项目(61362006,61371107,61172054);广西自然科学基金资助项目(2014GXNSFAA1183 87);广西信息科学实验中心资助项目(KF1408);广西无线宽带通信与信号处理重点实验室基金资助项目(GXKL061501);广西精密导航技术与应用重点实验室基金资助项目(DH201508)
赵 响(1979-),女,讲师,西安电子科技大学博士研究生,E-mail:zhxiang@guet.edu.cn.
网络出版地址:http://www.cnki.net/kcms/detail/61.1076.TN.20151021.1046.024.html
猜你喜欢
中国宝玉石(2021年5期)2021-11-18 07:42:26
Atmospheric and Oceanic Science Letters(2018年5期)2018-12-07 09:28:10
测控技术(2018年6期)2018-11-25 09:50:18
电子制作(2018年19期)2018-11-14 02:36:40
大众电视(蓝天下)(2018年8期)2018-10-26 01:00:48
电子制作(2016年1期)2016-11-07 08:42:41
系统工程与电子技术(2016年4期)2016-08-24 07:46:04
超硬材料工程(2016年1期)2016-02-28 22:20:07
哈尔滨师范大学自然科学学报(2015年6期)2015-04-23 08:20:39
哈尔滨师范大学自然科学学报(2015年1期)2015-04-19 06:55:29
