
电动汽车BLDC中刚量自适应延时反馈混沌控制
2016-12-02 05:23乔永鸣瞿成明
四川轻化工大学学报(自然科学版) 2016年1期
乔永鸣, 瞿成明, 罗 瑞
(安徽工程大学电气工程学院, 安徽 芜湖 241000)
电动汽车BLDC中刚量自适应延时反馈混沌控制
乔永鸣, 瞿成明, 罗 瑞
(安徽工程大学电气工程学院, 安徽 芜湖 241000)
电机是电动汽车驱动系统的核心,无刷直流电机(BLDC)在运行过程中会产生非线性混沌运动,影响车辆的寿命以及给行车安全带来不利的因素。从基本的d-q轴无刷直流电机模型出发,建立一个只含有两个参数的无纲量混沌模型,分析混沌现象的产生机理。根据BLDC的d-q混沌模型,把其中的交、直轴电压作为系统的控制量,采用参数自适应延时反馈法来对BLDC混沌现象进行抑制或消除。理论分析与数值仿真表明,控制器的设计具有科学性,能有效抑制混沌。
无刷直流电动机;混沌;延时反馈控制;参数自适应
引 言
电动汽车因其有不同的能量来源、环保无污染、能量利用率高、以及在道路损耗和提高交通安全等问题上容易进行智能管理,已成为目前的研究热点。电机作为电动汽车驱动系统的心脏,要求其具有大的转速范围、快速的转矩响应特性、以及在转矩和转速特性较宽的范围内具有高的效率。但在实际运行中,无刷直流电机有时会发生不规则运动,表现为转矩忽大忽小,反馈电流波型间歇振荡,控制性能不稳定等[1-4]。而这些不规则运动与非线性中的混沌现象特性(对初值敏感性,运动不可预测性,运动轨迹有界性)极其类似[5-8],因此运用混沌来探索无刷直流电动机的不规则运动成为一个重要的研究课题。
对于无刷直流电机中出现混沌现象的探索中,文献[8]在探究了无刷直流电机物理模型之后,经过转换得到一个BLDC的混沌系统运动模型。目前对于电机中出现的混沌现象控制探索中,出现了不少混沌抑制或者消除的方法。文献[9]运用的是OGY法,理论分析全面,但在实际的电机运行系统中不容易找到一个控制混沌运动的调整量,即便是找到了也不一定能得到想要的结果。文献[10]运用纳入轨道和强迫迁徙法对电机中的混沌运动进行消除,此法是在电机的速度微分方程中另外加进一个输入,但是在速度微分方程中能够更改外部参数量的只有负载转矩,而负载转矩不是可以随便控制的,在实际中不易做到。文献[11]采用状态延迟反馈抑制无刷直流电机的混沌运动,该法只需进行一个延时时间再反馈到系统中就可得到效果。本文给出适应BLDC的参数自适应延时反馈控制,主要是通过参数自适应方法来取得控制刚量K的值,此方法在物理上易于实现。
1 无刷直流电机混沌特性分析
1.1 无刷直流电机混沌模型
在基本的d-q轴无刷直流电动机物理模型上,建立一个适合无刷直流电机混沌运动分析的模型[12]。在转子磁场定向坐标系d-q中,以d、q轴电流id、iq和转子角速度w为状态变量,无刷直流电机的模型可表示为:
(1)
其中:Ra为定子电阻,Lq、Ld为定子q、d轴的电感,n为极对数,ud、uq为定子电压矢量d、q轴的分量,φ为转子永磁磁链,TL为负载转矩,J为转动惯量,b为阻尼系数。
若考虑无刷直流电机气隙均匀,即有Lq=Ld=L,则式(1)可表示为:
(2)
对式(2)进行如下两个变换:
(1)线性仿射变换:
(3)
(2)时间尺度变换:
(4)
则可得到:
(5)
其中:
根据式(3)~式(5),得到含有两个无纲量的无刷直流电机混沌模型:
(6)
1.2 无刷直流电机混沌动态特性分析

(7)

在平衡点处的雅克比矩阵为:
其对应的特征方程为:

(σ+2)λ2+(γ+σ)λ+2σ(γ-1)=0
(8)

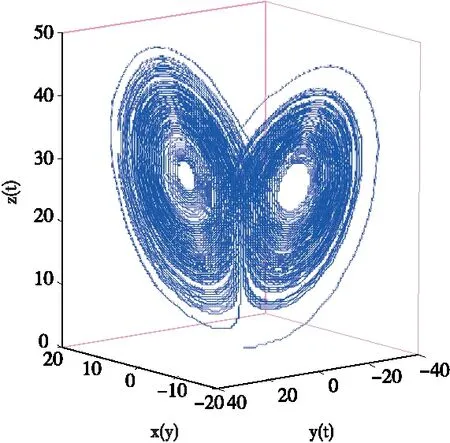
图1 转速与d、q轴电流相轨迹

图2 d、q轴电流相轨迹
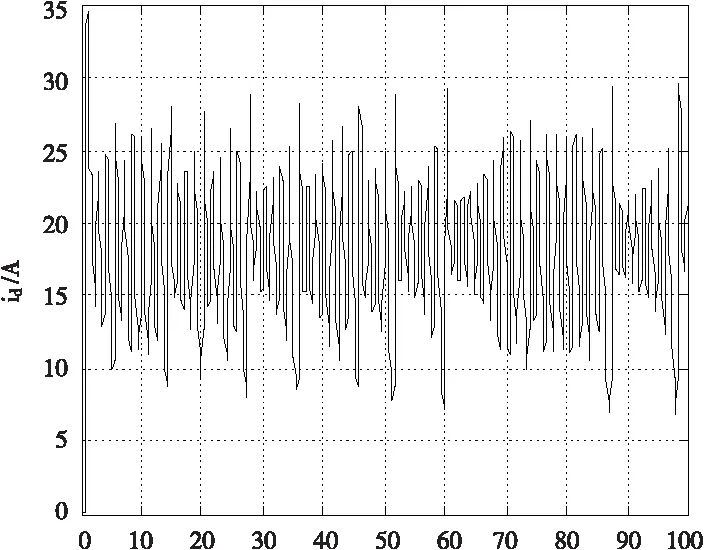
图3 d轴电流时间状态曲线
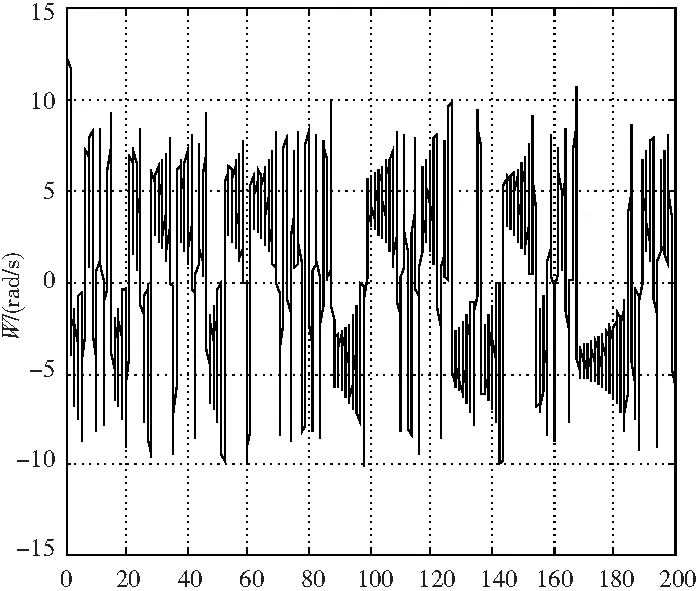
图4 转速的时间状态曲线
图1~图4分别表示无刷直流电动机的相轨迹和时间状态响应曲线。可以看出,在一定参数范围内,曲线的行为极其不规则,既不是稳定状态又不是周期状态,但似乎又不是完全没有规律。从相轨迹曲线看,呈现出蝴蝶一样的形状,这是混沌系统特有的现象,说明此时无刷直流电机处于混沌运动状态。
2 混沌现象的状态延时反馈控制
针对式(7)表示的混沌模型,以无刷直流电机的交轴电压iq和直轴电压id为控制量,利用电流的延时反馈实现对无刷直流电机混沌现象的抑制。采用状态延时反馈的系统方程:
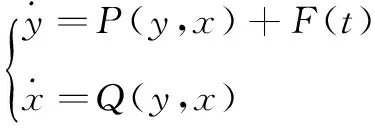
其中,F(t)为控制信号,取状态延时反馈控制形式为F(t)=k(y(t-τ)-y(t)),式中k为控制尺度,当F(t)=0时,系统处于混沌状态。
当y(t-τ)≈y(t)时,控制F(t)=0,表示当输出值与控制目标相同时,控制量基本等于0。采用上述的F(t)控制形式,控制结构比较简单,只需进行一个延时处理就可以控制混沌,且可以在任意时刻进行控制。
为了抑制无刷直流电机中混沌运动,使电机的转速为固定值,需要取得合理的延时时间τ和控制刚量k。
2.1 延时时间的取值
延时时间τ的取值方法有两种:(1)延时时间τ与第n个不确定周期轨迹的周期时间相等,则当系统的输出周期时间与第n个不确定周期轨迹的周期时间大小一样时,系统的扰动输出为0,这就表示没有扰动会改变第n个不确定周期轨迹的解。但是第n个不确定周期轨迹的周期不容易获取。(2)使延时时间τ取输出系统的前一个极大值与后一个极大值之间的时间差,即:
2.2 控制刚量k的确定
一般情况下,控制刚量k的确定,是通过使系统中Lyapunov指数小于0来确定k的取值范围,但Lyapunov指数的获得需要预先确定系统的模型。本文运用参数自适应方法来调整控制刚量k,此方法不用知道系统的模型且容易实现。k的调整如下:
kn+1=kn+Δk
Δk=k0[y(t-τ)-y(t)]Δt
其中:k0为权重系数,Δt为时间步长。


(9)
在延时反馈的基础上增加自适应方法,可以使反馈控制刚量在控制过程中自动的被选择,避免了事先确定这些控制参数的繁琐过程,操作简单,易于实现。
3 数值仿真与分析
上述的无刷直流电机延时反馈控制系统中,电机参数[13]:L=14.25 mH,Ra=0.9 Ω,φ=0.031 N·m/A,J=4.7×10-5kg·m2,b=0.0162 N·m(rad·s-1),初始状态为id(0)=iq(0)=w(0)=0.01,通过简单的计算σ=5.46,γ=14.93,进而取kd=kq=5,τ=0.42,k0=0.5,在t=30 s时加入延时反馈信号,控制结果如图5~图7所示。由图5可以看出,在施加了延时反馈控制信号之后,BLDC的转速迅速稳定到一个恒值。从图7可以看出,控制量在加入控制后有稍微的波动之后恢复到控制前的状态。

图5 加入控制后d轴电流的时间状态曲线
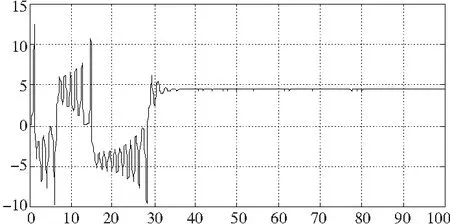
图6 加入控制后的转速时间状态曲线


4 结束语
针对电动汽车驱动系统中BLDC运行过程存在的混沌运动,利用一个电流的参数自适应延时反馈对其进行控制,施行起来简单,易于得到预期结果,控制结果是将转速控制到系统的一个不动点上。同时,提出的自适应反馈方法不论对系统状态变量还是对系统的参数进行控制都是有效的,反馈控制刚量在控制过程中随着系统的动力学变化而选择,避免了原始方法中事先选取的繁杂。大量的仿真结果,证实了此控制方法的可行性,同时为无刷直流电机混沌运动的控制研究提供一种新的途径。
[1] 杨志红,姚琼荟.无刷直流电机系统非线性研究[J].动力学与控制学报,2006,4(1):59-62.
[2] LI Zicheng,CHENG Shanmei,QIN Yi,et al.A novel line-to-line back EMF calculation for sensorless brushless DC motor drives[C]//Proceedings of International Conference on Electrical Machine and Systems,ICEMS 2008,Wuhan,China,October 17-20,2008:1406-1411.
[3] 王勇.永磁无刷直流电机的应用与发展[J].科技资讯,2008,22(1):27-128.
[4] 张深.直流无刷电动机原理及应用[M].2版.北京:机械工业出版社,2004:1-13.
[5] 张琪昌,王洪礼,竺致文,等.分岔与混沌理论及应用[M].天津:天津大学出版社,2005:58-60.
[6] 王文.混沌系统控制方法研究[D].大连:大连交通大学,2009.
[7] 姚广路.车辆动力驱动系统电机混沌特性及实 验研究[D].北京:北京交通大学,2012.
[8] 梁建华.非线性电路混沌现象的分析与控制及 电路设计[D].南宁:广西大学,2013.
[9] DADRAS S,MOTALLEBZADEH F,OZGOLI S,et al.Control of Chaotic uncertain brushless DC motors[C]//Proceeding of International Conference on Control and Automation,ICCA 2009, Christchurch,December 9-11,2009:9-11.
[10] UYAROGLU Y,CEVHER B.Chaos control of time-scale brushless DC motor with sliding mode control method[J].Turkish Journal of Electrical Engineering & Computer Sciences,2013,21(3):649-655.
[11] LIU Lidong.The Chaos research on Anti-control of BLDCM of electrical vehicle[C]//Proceeding of 2014 17th International Conference on Electrical Machines and Systems (ICEMS),Hangzhou,China,October 22-25,2014:22-25.
[12] JIAN Jigui,SHEN Yanjun.Estimations of bounds for brushless direct current motor system and application in Chaos synchronization[C]//Proceeding of 2012 IEEE International Conference on Automation and Logistics,Zhengzhou,Augest 15-17,2012:145-149.
[13] ROY P,RAY S,BHATTACHARYA S.Control of Chaos in brushless DC motor design of adaptive controller following back-stepping method[C]//Proceeding of 2014 International Conference on Control,Instrumentation,Energy and Communication(CIEC),Calcutta,January 31-February 2,2014:41-45.
Stiffness Adaptive Delayed Feedback Chaos Control of BLDC in Electric Vehicle
QIAOYongming,QUChengming,LUORui
(College of Electrical Engineering, Anhui Polytechnic University, Wuhu 241000,China)
Motor is the core of electric vehicle propulsion system, and nonlinear chaotic motion is appeared in the working condition of brushless DC motor, which will bring bad influence on the life of vehicle and the safety of driving adverse factors. In this paper, from the basic d-q axis brushless DC motor model, a chaotic model containing only non-dimensioral parameters is astablished, and the generating mechanism of chaotic phenomena is analysed. According to the d-q chaotic model, the direct-axis and quadrature-axis voltage is used as manipulated variable, and the adaptive parameters delay feedback is used to restrain or eliminate BLDC chaos phenomenon of motors. Theoretical analysis and numerical simulation show that the design of controller is scientific and can effectively restrain the chaos.
brushless DC motor; chaos; delay feedback control; adaptive parameters
2015-11-15
安徽省检测技术与节能装置省级实验室开放基金项目(1506C085002)
乔永鸣(1989-),男,河南南阳人,硕士生,主要从事电机控制系统方面的研究,(E-mail)1039965672@qq.com
1673-1549(2016)01-0054-05
10.11863/j.suse.2016.01.12
TM301.3
A
猜你喜欢
大电机技术(2022年5期)2022-11-17
自动化仪表(2020年10期)2020-11-13
四川冶金(2018年1期)2018-09-25
电子制作(2017年1期)2017-05-17
通信电源技术(2016年1期)2016-04-16
船舶力学(2015年6期)2015-12-12
淮南师范学院学报(2015年3期)2015-03-22
电机与控制应用(2015年3期)2015-03-01
电机与控制应用(2015年1期)2015-03-01
汽车维护与修理(2014年10期)2014-02-28
