
汽车防撞系统中的非接触测距研究*
2016-12-02 02:37田海军赵杨辉
电子技术应用 2016年10期
田海军,杨 婷,赵杨辉
(东北电力大学 自动化工程学院,吉林 吉林 132000)
汽车防撞系统中的非接触测距研究*
田海军,杨婷,赵杨辉
(东北电力大学 自动化工程学院,吉林 吉林 132000)
以脉冲飞行时间为基础,根据其测量原理,提出了汽车防撞系统的整体方案。针对近距离低速行驶的车辆,设计了系统的硬件和软件部分。系统的总体结构由激光发射模块、激光接收模块、时刻鉴别单元组成。采用高精度时间数字转换芯片TDC-GP22、高性能STM32单片机作为主控器,SPLLL90_3半导体激光二极管、AD500-9作为接收的光电探测器,单片机通过SPI接口技术读取测量结果,经单片机处理后的数据传给LCD12864显示器。基于汽车的行驶方向,并根据激光测距返回的距离值计算出斥力的值,从而改变行车路径,有效地解决了汽车防撞及报警问题。
脉冲飞行时间;高精度;TDC-GP22;汽车防撞
0 引言
随着现代科技的进步和人类生活水平的不断提高,现代工业自动化的发展已不再停留在传统的接触式测距方法中。人们生活的各方面都涉及距离测量,如汽车防撞、航空遥控、数字检测通信等领域。据世界卫生局统计的伤亡事件报告中,交通事故的隐患与日剧增。因此为了减少交通事故的发生率,研究高性能配置的汽车防撞系统具有重要意义。空气测距、物体识别等方面主要采用的是非接触式测距。激光在空气中的传播速度较快且距离较远,因此用于汽车防撞系统中是较好的选择[1]。激光的方向性好、单色性强、亮度高的特点,使其测量精度优于一般仪器,且体积小,安装调整方便,故是目前测量距离中比较理想的仪器。所以本文采用激光非接触式的测量方法,防止汽车出现撞伤、划伤等事故,通过模拟实验得到了良好的监测效果。
1 总体设计
激光测距系统由电源系统、发送和接收模块、时刻鉴别电路、显示单元、STM32F103C8T6单片机、光学元件等组成。激光测距系统结构框图如图1所示。
单片机上电后,由I/O口产生占空比一定的脉冲信号,驱动电路触发半导体激光器发出脉冲信号,一部分信号经分束镜反射到光电探测器上,此信号为脉冲初始时刻t1,另一部分信号经目标物漫反射到达光电探测器,将接收的光信号转换成电信号,放大电路对信号放大后进入时刻鉴别电路,此信号为脉冲结束时刻 t2,t1、t2的时刻差值由 TDC-GP22记录下来[2]。STM32单片机通过SPI接口通信方式读取测量结果,经数据处理后,发射端到目标物的距离显示到 LCD12864,此距离就是车与障碍物之间的距离(安装有激光雷达的汽车)[3]。由距离信息即可通过软件获得车与障碍物之间的距离、相对速度及方位信息。

图1 激光测距系统结构框图
2 控制系统硬件设计
2.1激光发射电路设计
激光发射电路由555定时器、三极管2N1711、半导体激光器SPLLL90和 74LS112组成,采用脉冲式测距的方法。激光发射电路原理即由555定时器产生一个脉冲信号,74LS112使此脉冲信号的电平发生变化,通过改变电容和电阻值的大小,使脉冲占空比发生一定的变化,最终产生 25 ns的脉冲峰值[4]。激光发射电路如图2所示。

图2 激光发射电路
2.2激光接收电路及时刻鉴别电路设计
接收电路功能是滤除噪音和干扰信号,TDC-GP22芯片是接收电路的核心器件。带有单片机处理单元的TDC-GP22芯片是一款专门进行时间测量的时间数字转换芯片。激光接收电路和时刻鉴别电路如图3所示。
接收模块的光电探测器 AD500-9将光脉冲信号转换成电脉冲信号,更好地滤除噪音和毛刺[5]。测量的精确性与光电探测器的稳定性、响应时间以及灵敏度有着直接的影响。选用UA733放大器,它具有较高的增益稳定性和快速的处理能力,可将信号放大 10~300倍[6]。为了提高信噪比,采用 MAX913比较器,它是一款高速低耗的电平输出比较器,通过设定电平值滤波,使测量更加准确。时间数字转换芯片TDC-GP22利用ACAM公司专利的测量原理[7]。通过测量2个或多个脉冲之间的时间间隔完成时间测量。

图3 激光接收电路和时刻鉴别电路
文中选用 STM32F103C8T6单片机,Flash存储器为64 bit,具有高达32 bit的SRAM,工作频率最高为72 MHz,由2个SPI接口和2个I2C接口组成[8]。支持2种调试模式,即单线调试和JTAG接口。该单片机具有很宽的温度范围且能保证低功耗的应用要求。单片机复位电路由电容和VCC串联电阻构成[9]。引脚PA4~PA7分别与TDCGP22芯片的SSN、SI、SO、SCK引脚连接,使用SPI1接口进行通信。TDC-GP22芯片的stop1和stop2端口分别控制脉冲接收和发射信号。引脚 EN_START、EN_STOP1、EN_STOP2分别与单片机PB8—PB10引脚相连。可以作为JTAG的引脚有JTDI、RET、JNRST、JTCK、JTMS、JTDO,用来下载程序和调试单片机。STM32单片机的VSS引脚必须接地,VDD必须接VCC。
3 软件设计
软件使用C语言编写,编写程序代码运用Keil软件编译。开发单片机系统软件使用C语言编写的优点是软件易调试、升级维护方便、代码使用率高、便于跨平台的代码移植等,因此在单片机系统设计中得到了广泛的应用。
系统软件程序流程图如图4所示,系统软件设计包括串口初始化、定时器初始化、TDC-GP22初始化、单片机初始化等。单片机初始化包括时钟、IO口外设、设置SPI1和SURT1通信参数等。软件工作过程:单片机分别初始化配置串口、定时器、TDC-GP22;然后,单片机给TDC-GP22时间间隔模块发出一个Start信号,使其进入测量状态;与此同时,单片机控制激光驱动电路,使半导体激光器发射激光脉冲,将此信号送入时间测量模块的Stop1-1和Stop1-2通道并开始计数;同时,光脉冲遇到目标物后经光学系统聚焦后,光电探测器将光学信号A1、A2转换成电信号 B1、B1;B1、B2分别经信号处理后,C1、C2作为回波的脉冲信号送人Stop2-1和Stop2-2通道,此时TDC-GP22芯片停止计数并将采集的时间间隔D1、D2送给单片机;由时间间隔 D1和 D2,单片机计算出车与障碍物之间的距离、方位和相对速度[10];最后,单片机根据上述信息即可判断车与障碍物之间的安全状态,若车处于危险状态,则单片机发出报警信号提醒驾驶员采取措施避免发生交通事故,ECU接收该报警信号用于车辆的紧急制动。系统的探测频率为100 Hz,则相邻两次距离检测的时间间隔是0.02 s。

图4 系统软件程序流程图
4 实验与结果分析
测量过程中分别将障碍物放在距实验平台的左前方和右前方,探测器探测到车与障碍物之间的距离分别用d1、d2表示,障碍物与车的垂直距离用 d表示,d1、d2对应的时间测量结果为 t1、t2。测量结果如表1、表2所示。
本系统的误差包括脉冲的上升时间、峰值功率、光折射率、对激光光强的吸收率等。由表1、2可知,随着测量距离的增大,误差也会逐渐增加。当探测距离小于3 m时,两路探测器的距离较近,即使回波能量较强、测量精度再高,也无法分辨障碍物距车的位置。本研究的汽车防撞系统中的非接触测距,实验表明:测量误差小于20 cm,满足技术实用要求。电路结构简单,可靠性高,成本低,达到了预定的效果。

表1 障碍物在实验平台左前方
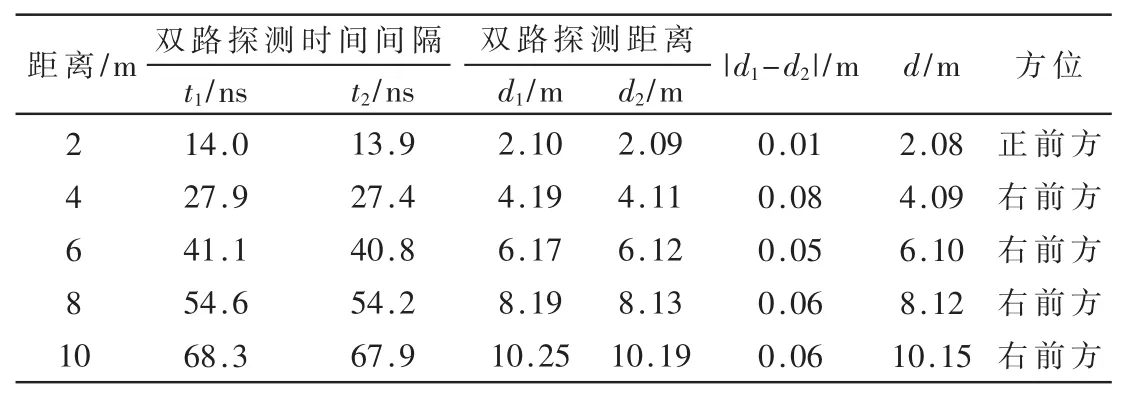
表2 障碍物在实验平台右前方
[1]吕德深,梁承权.一种汽车防撞报警系统的设计与仿真[J].制造业自动化,2013,35(11):150-154.
[2]霍玉晶,陈千颂,潘志文.脉冲激光雷达的时间间隔测量综述[J].激光与红外,2001,31(3):136-139.
[3]HSIAO M J,HUANG J R,CHANG T Y.A built in parametric timing measurement unit[J].IEEE Design and Test of Computers,2004,21(4):312-320.
[4]施智勇,潘晓声,张谦利.用延时法进行高精度脉冲激光测距[J].光学精密工程,2014,22(2):253-258.
[5]万小强.基于 AD500型 APD的激光测距硬件电路的研究[D].武汉:武汉理工大学,2012.
[6]Huang Zhen,Liu Bin.New method to measure the time-offlight in pulse laser ranging[J].Journal of Optoelectronics Laser,2006,17(9):1153-1155.
[7]岱钦,耿岳,李业秋,等.利用 TDC-GP21的高精度激光脉冲飞行时间测量技术[J].红外与激光工程,2013,42(7):1706-1709.
[8]金湘亮,曾云,陈迪平.红外线测距系统的建立及其在汽车防撞系统中的应用[J].红外技术,2001,23(3):43-45.
[9]周刚,吴杰.汽车防撞毫米波雷达系统参数优化设计[J].电讯技术,2011,51(7):77-80.
[10]贺大松.汽车纵向防撞报警系统开发[D].成都:电子科技大学,2008.
Non-contact location study of automotive collision avoidance system
Tian Haijun,Yang Ting,Zhao Yanghui
(School of Automation Engineering,Northeast Dianli University,Jilin 132000,China)
Whole design of automotive collision avoidance system is presented by this article based on pulsed flying time according to its measurement mechanism.The hardware and software on vehicles is designed with low speed and close range.The overall structure of the system is composed of laser emission module,laser receiving module and time discrimination unit,by which high precision time digital conversion chip TDC-GP22,high performance STM32 microcontroller as the main controller,SPLLL90_3 semiconductor laser diode and AD500-9 as a receiving photoelectric detector are adopted.Measurement results are read by microcontroller though SPI Interface technology then transmitted to the LCD12864 indicator until they are processed by microcontroller.Based on the driving direction of the car,repulsive force is calculated to change plan path according to range value
by laser range,by which automotive collision avoidance and alarm problems have been solved effectively.
pulsed flying time;high precision;TDC-GP22;automotive collision avoidance
TP311
A
10.16157/j.issn.0258-7998.2016.10.020
国家自然科学基金资助项目(61304015)
2016-04-26)
田海军(1971-),男,副教授,主要研究方向:过程检测技术及层析成像技术。
杨婷(1991-),女,硕士研究生,主要研究方向:检测技术及自动化装置。
赵杨辉(1989-),男,硕士研究生,主要研究方向:嵌入式系统设计。
中文引用格式:田海军,杨婷,赵杨辉.汽车防撞系统中的非接触测距研究[J].电子技术应用,2016,42(10):80-82.
英文引用格式:Tian Haijun,Yang Ting,Zhao Yanghui.Non-contact location study of automotive collision avoidance system[J].Application of Electronic Technique,2016,42(10):80-82.
猜你喜欢
数学物理学报(2022年3期)2022-05-25
动漫界·幼教365(中班)(2020年3期)2020-04-20
铁道通信信号(2020年9期)2020-02-06
数学物理学报(2019年5期)2019-11-29
创新作文(1-2年级)(2019年4期)2019-10-15
小哥白尼(趣味科学)(2018年12期)2018-12-18
汽车工程师(2018年1期)2018-07-13
中成药(2017年12期)2018-01-19
中国公路(2017年13期)2017-02-06
民用飞机设计与研究(2015年3期)2015-12-07
