
汽车前照灯自适应控制系统设计
2016-12-01 21:20王文建王鑫惠金粤飞黄志涛
科学与财富 2016年26期
王文建+王鑫惠+金粤飞+黄志涛
摘 要:本文设计了汽车前照灯自适应控制系统,该系统根据车辆行驶状态、速度变化以及天气环境等因素,自动控制前照灯进行实时动态的光照调节,实现前照灯自适应照明,从而提供最佳道路照明效果,保障行车安全。汽车前照灯自适应照明系统是利用传感器,根据道路的状况、时段以及天气变化等因素,对车辆行驶中的任何变化,自动做出反应,进行自动调节,并采取有效措施,确保行车安全,控制系统从车内的电子系统和传感器获得信息,由传感器来辨识各种照明状况。根据传感器传过来的信息可以对各种驾驶情况进行反馈从而实现多种照明分布。
关键词:汽车前照灯;自适应控制系统;自适应照明;亮度感应调节
引言
随着汽车电子技术的发展,人们对汽车的安全、舒适和人性化要求越来越高,而传统的前照灯系统存在照明光光型单一、近距离照明效果不好、弯道照明有暗区、照明有炫光等问题,严重影响了行车的安全。随着汽车的安全技术越来越受到人们的重视,而由于汽车的普通前照灯具有固定的照射范围,当驾驶者在夜间弯道行驶时,普通前照灯无法改变、调节照明角度的方向,常常会在弯道内侧出现盲区,驾驶者的视线被限制在大灯光束照射的直线范围内,这对于夜间弯道行驶非常危险,极大地影响了夜间行车的安全性。汽车前照灯的亮度和照射方向对于行车安全是至关重要的,前照灯的发光强度不足或者照射方向不合适,汽车前方的情况就不能清晰看见,存在安全隐患。在此基础上,设计安全的照明系统是有必要的,相对于传统的前照灯系统更能适应道路的实际情况,运行成本低,并能够显著提高驾驶者夜间行车的安全性和舒适性,能够大大减少夜间眩目导致的交通事故,极大满足了人们对行车安全驾驶和舒适性的要求,随着汽车工业的发展,其功能将会越来越完善,影响也将会越来越深远,具有重要的现实意义。
1 系统原理
汽车前照灯亮度感应调节及远近光灯自动切换系统可在车灯开启的情况下根据外界光线影响自动切换远近光,在车辆行驶过程中,驾驶者不再需要人为干预车辆灯光,自动切换远近光也不会对会车车辆驾驶员的视野造成影响,并且在远近光确定的情况下根据外界光线影响自动调节灯光亮度。
根据道路环境状况和车辆行驶状态的变化而自动进行灯光调整的前照灯智能控制系统,能够改善夜间和恶劣条件下的照明效果,提高行车的安全性,降低交通事故的发生率。汽车前照灯系统通过综合利用各种传感器技术,采集路面上的各种信息,以便感知驾驶员操作。根据车辆行驶状态、速度变化以及天气环境等因素,自动控制前照灯进行实时动态的光照调节,实现前照灯自适应照明,从而提供最佳道路照明效果,保障行车安全。汽车前照灯自适应照明系统是利用传感器,根据道路的状况、时段以及天气变化等因素,对车辆行驶中的任何变化,自动做出反应,进行自动调节,并采取有效措施,确保行车安全,控制系统从车内的电子系统和传感器获得信息,由传感器来辨识各种照明状况。根据传感器传过来的信息可以对各种驾驶情况进行反馈从而实现多种照明分布。
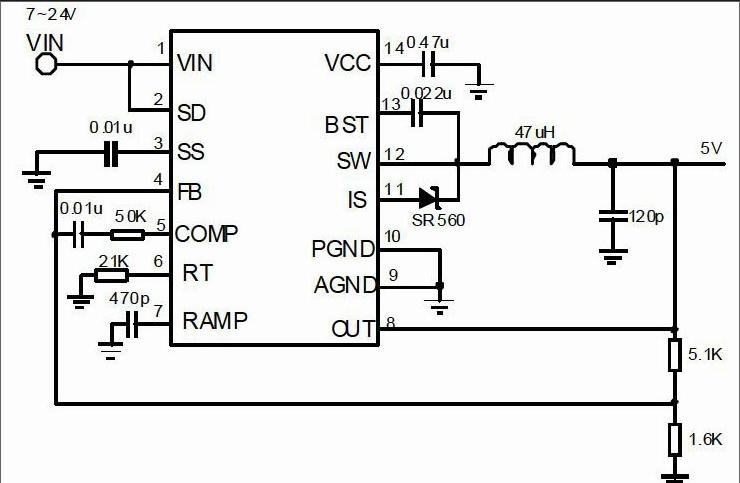
2 主电路设计
3 线性二自由度汽车模型
汽车在水平路面上等速行驶时的操纵稳定性主要是通过转向盘角输入或力输人的响应来研究,作为刚体它具有6个自由度。为了获得满意的计算精度,通常利用4、5个自由度非线性数学模型来模拟,即横摆角速度、质心的侧偏角、车身侧倾角、前轮转角和转向盘转角为自由度,并考虑轮胎侧偏的非线性特性。但是这样的模拟计算特别复杂,为了便于理解,需要简化模型,把多自由度简化为只有横摆角速度和质心侧偏角的二自由度模型。对汽车模型做如下假设:第一、汽车只做平行于地面的平面运动,无垂直方向运动,也无俯仰和侧倾运动。第二、忽略悬架作用及转向系影响,直接以前轮转角作为输入。第三、忽略左右轮轮胎由于载荷的变化而引起轮胎特性的变化以及轮胎回正力矩的作用。第四、汽车沿 轴方向做等速运动,不考虑地面切向力和空气阻力作用。这样实际汽车就简化为两轮摩托车模型。在上述情况下二自由度汽车模型精度足够。
4 两相混合式步进电机模型
步进电机是一种将电脉冲信号转换为相应角位移或线位移的执行器,可以直接实现数字控制。它的机械角位移与输入的数字脉冲信号有着严格的对应关系:即一个脉冲信号可以使步进电动机前进一步,是一种比较理想的执行元件。
在AFS系统中,MCU将采集到的车速信号、方向盘转角信号和位置传感器信号通过一定的公式计算,将计算出的角度通过A/D转换,转换成脉冲信号,然后通过总线传送到步进电机驱动执行单元,通过驱动执行单元将左右两个弯道照明步进电机转动至相应位置,以适应弯道照明,可见建立步进电机模型为AFS仿真奠定基础。
5 参数设计
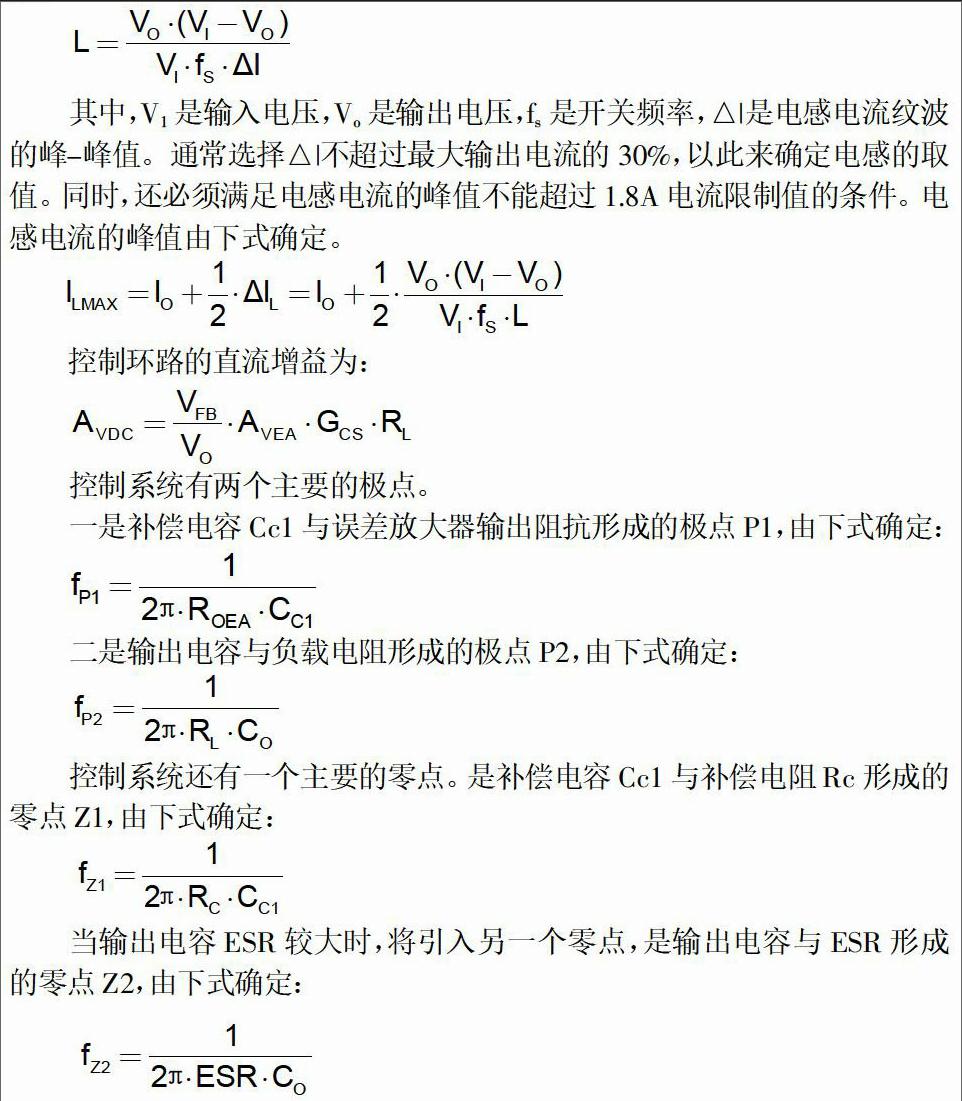
当输出电流较大时,转换器工作在连续传导模式,即电感电流连续,不会降至0。电感的取值会影响到电感电流的纹波,两者之间的关系由下式确定。
结束语
该系统能够根据不同的行车环境自动调整前照灯的角度和强度,从而不仅提高了汽车夜间驾驶的安全性,也提高了光源的利用率,这对现阶段的汽车车灯智能控制系统的研究具有一定的参考价值。设计的汽车前照灯自适应照明系统能够商品化,相对于传统的前照灯系统更能适应道路的实际情况,运行成本低,并能够显著提高驾驶者夜间行车的安全性和舒适性,具有重要的现实意义,项目的研究会产生不同程度的经济效益和社会效益。
随着汽车拥有量的增多,驾驶员不正确使用灯光或者长时间使用远光灯,会车时也不按规定转换灯光,导致道路违法行为频发所引发的交通事故呈上升趋势。这是由于部分驾驶员根本不知道如何正确使用远近光灯;或者驾驶员的安全意识淡薄。而远光灯的光柱位置较高,与前车或对面来车的视线基本平齐,夜间行使时遇远光灯刺激,直接影响对面驾驶员的视线,造成短时视觉盲区,即造成眩光,极易引发交通事故。所设计的汽车前照灯自适应照明系统能够显著提高驾驶者夜间行车的安全性和舒适性,能够大大减少夜间眩目导致的交通事故。
参考文献
[1]张昌钱,李宏建,徐仁伯.一种基于APFC的大功率LED驱动电路的研究[J].宇航计测技术,2013(4):45-49.
[2]白晨光,杨茜,刘宗昂.有源功率因数校正技术在AC/DC恒流源中的应用[J].信息技术,2010(8):204-206.
[3]孟凡菲.一种功率因数校正电路的研究与设计[D].沈阳工业大学,2013.
[4]段建华.照明用大功率LED恒流驱动技术研究[D].哈尔滨工业大学,2010.
[5]方宇.高功率因数可逆PWM变换器及其数字控制研究[D].南京航空航天大学,2008.
[6]杨倩.单级功率因数校正AC/DC变换器的研究[D].贵州大学,2008.
作者简介:王文建(1973-),男,硕士,高级工程师,从事电子技术研究及教学。
