
基于超声波的车辆倒车防撞告警器的设计
2016-12-01 03:04:12
传感器世界 2016年2期
北京信息科技大学信息获取与检测实验室,北京 100101
一、引言
经济的快速发展,导致人们对汽车的需求量越来越大,特别是近年以来人口大量的向大中城市流动,造成城市车流量大幅度增加,交通也越来越拥挤。驾驶员的视线由于各种各样的原因受到限制,给其倒车、转弯带来极大的不便,撞车和刮擦的事故时有发生。为此,设计一款能够提前提醒驾驶员规避障碍物的汽车防撞告警系统对于驾驶员安全驾驶具有重要意义。
本文所设计的系统,利用单片机及超声波测距仪实现了测距及告警,并引入蓝牙无线通信技术实现了移动端的监控。通过比较汽车尾部与障碍物之间的距离数值与预先设置好的报警距离阈值,进行距离提示与报警,当障碍物的距离小于设定的阈值时,告警器开始报警,并根据距离的远近发出不同频率的报警声,同时通过蓝牙上传至移动端,便于实时查看并及时做出反应,为驾驶员提供更高的安全保障。结果表明该设计完全满足车辆倒车防撞告警需求,具有较高的实际应用价值和市场应用前景。
二、基本原理
1、车辆倒车防撞告警系统原理
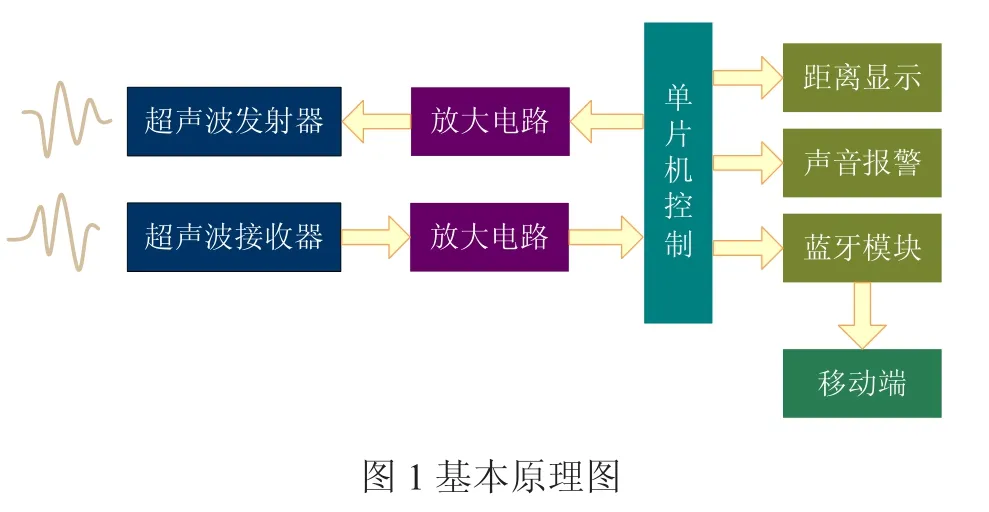
由装在汽车后部的超声波测距传感器发射信号,当信号遇到障碍物后,反射回测距传感器,然后由已编好程序的单片机记录测距传感器的发射和返回信号,接收电路接收到信号之后送入单片机进行处理,并计算出车辆与障碍物之间的距离[1],随后将结果送入显示电路进行显示,同时通过蓝牙把数据传输到移动端,接着再按照技术指标的要求进行报警。
2、超声波测距的工作原理
超声波测距的原理是利用超声波发射器向某一方向发射超声波,在发射时刻的同时开始计时,超声波在空气中传播, 途中碰到障碍物就立即返回来,超声波接收器收到反射波就立即停止计时[2]。超声波在空气中的传播速度为340m/s, 根据计时器记录的时间t,就可以计算出发射点距障碍物的距离(s),即:s=340t/2。
超声波测距的工作方式有三种:相位检测法、声波幅值检测法、渡越时间检测法。本设计采用的即是渡越时间检测法。
渡越时间检测法的原理是在车辆移动的过程中利用超声波在空气中的定向传播和固体反射特性(纵波),通过接收自身发射的超声波信号,根据超声波发出及回波接收的时间差和传播速度,计算传播距离,从而得到障碍物到车辆的距离[3]。其中,从发射传感器发射超声波,经气体介质传播到接收传感器的时间就是渡越时间。渡越时间检测法的工作方式简单,直观,在硬件控制和软件设计上都非常容易实现。
三、硬件选取与设计
1、单片机控制模块
本设计使用的是STC公司推出的新一代高速低功耗超强抗干扰的单片机STC89C52RC,其优点是:指令代码完全兼容传统8051单片机,12时钟机器周期和6时钟机器周期可以任意选择。ISP(在系统可编程)/IAP(在应用可编程),无需专用编程器,无需专用仿真器,可通过串口(RxD/P3.0,TxD/P3.1)直接下载用户程序,数秒即可完成一片。具有EEPROM功能,具有看门狗功能,共3个16位定时器/计数器,即定时器T0,T1,T2。外部中断4路,下降沿中断或低电平触发电路,Power Down模式可由外部中断低电平触发中断方式唤醒,通用异步串行口(UART),还可用定时器软件实现多个UART。
2、超声波测距模块
根据系统要求,选用HC-SR04超声波测距模块,该模块的主要特点是体积小,测距精度高,HC-SR04超声波测距模块可提供2cm~400cm的非接触式距离感测功能,测距精度可达到3mm;反应速度快,10ms的测量周期,不容易丢失高速目标;发射头和接收头紧靠,和被测目标基本呈直线关系;模块上有LED指示,偏于观察和确认。
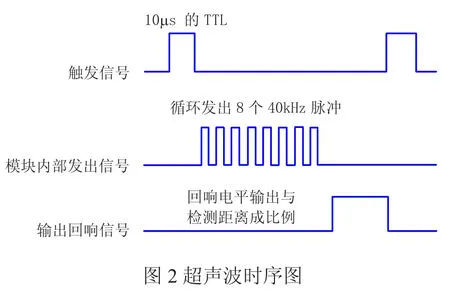
HC-SR04模块的工作原理:采用I/O触发测距,根据超声波时序图可知:只要给TRIG提供一个至少10μs的高电平信号,模块会自动发送8个40kHz的方波,并自动检测回波;有信号返回,则通过I/O口ECHO输出一个高电平信号,高电平持续的时间就是超声波从发射到返回的时间。测试距离= (高电平时间*声速(340m/s))/2。超声波的时序图如图2所示。
3、蓝牙模块
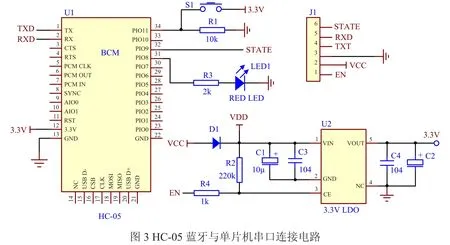
无线蓝牙通信采用HC-05嵌入式蓝牙串口通讯模块,具有两种工作模式:命令响应工作模式和自动连接工作模式,在自动连接工作模式下模块又可分为主(Master)、从(Slave)和回环(Loopback)三种工作角色。在这里我们采用自动连接模式,当模块处于自动连接工作模式时,将自动根据事先设定的方式连接的数据传输。其电路结构如图3所示。
4、显示模块
显示电路采用4位共阴极LED数码管进行动态显示。
四、系统软件设计
开发环境选用Keilμ Vision4 IDE集成开发环境,根据车辆倒车防撞告警器的功能,系统软件部分要实现的功能如下:
(1)控制超声波的发射与接收;
(2)计算超声波往返时间差,进而计算出汽车尾部与障碍物之间的距离;
(3)进行数据处理,比较汽车尾部与障碍物之间的距离数值与预先设置好的报警距离阈值;
(4)进行距离提示与报警,根据距离的远近发出不同频率的报警声;
(5)向移动端上传数据。
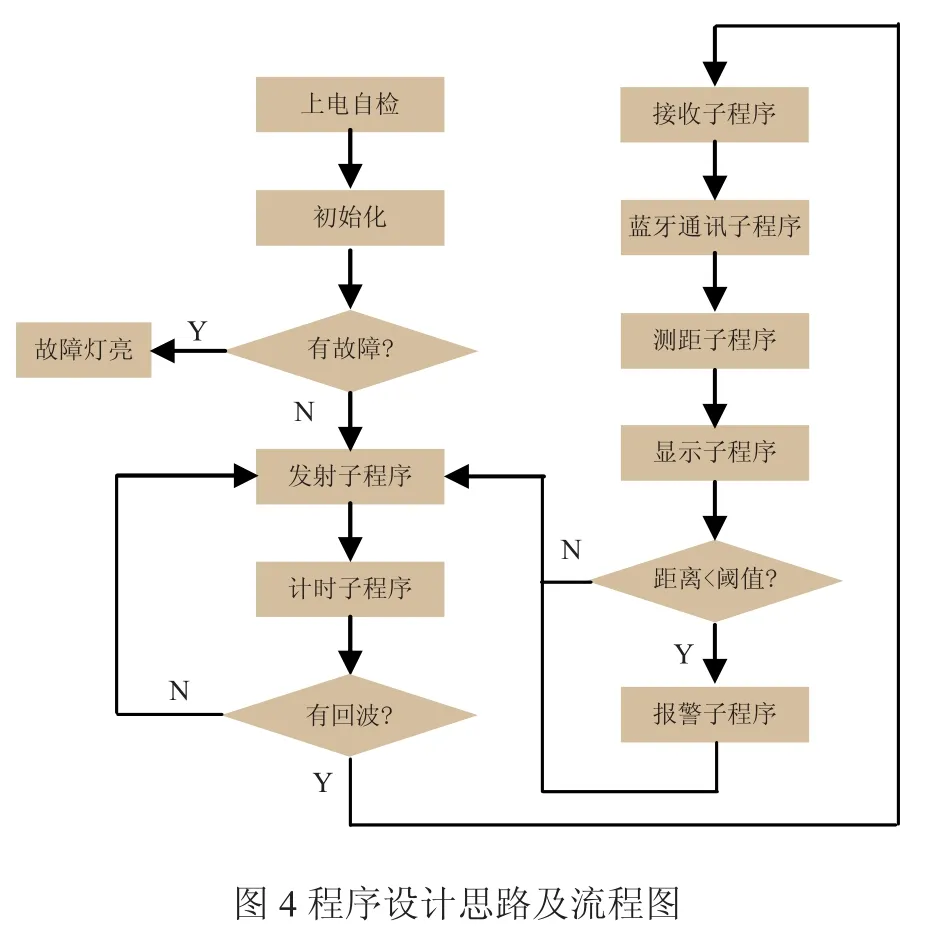
系统软件采用面向对象的模块化编程思想。整个系统软件包括发射子程序、接收子程序、计时子程序、测距子程序、显示子程序、蓝牙通讯子程序、报警子程序等模块,其程序流程如图4所示。
五、系统性能及可行性测试情况
经过实验模拟测试,当障碍物距离小于设定的阈值时,告警器开始报警,随着障碍物的距离越来越近,报警频率不断提高,当远离障碍物时,告警频率便会随之下降,直到障碍物距离超出设定阈值,即认为车辆在安全范围之内,告警器不再报警,此时移动端正常显示距离测量数据,当障碍物距离超出400cm(即HC-SR04模块最大感测范围)时,停止刷新数据。实验测试结果证明设计满足实际应用需求。
六、结论
本设计硬件简单,成本较低,易于实现,报警阈值可以自行调整,读数直观,超声波测距显示单元和移动端实时监控部分相互独立,可同时进行,保证了测距数据的实时性。
测试过程中会有3~5cm左右的误差,主要原因有:超声波回波强弱与障碍物的距离远近有直接关系;超声波波束对探测目标角度范围产生的影响;媒质温度变化对测量精度造成的影响。可采用精度更高的测距传感器进行改进。但在汽车防撞告警系统中,此误差基本满足使用要求。
猜你喜欢
科学(2020年3期)2020-01-06 04:02:51
电子制作(2017年7期)2017-06-05 09:36:13
当代医药论丛(2017年22期)2017-04-12 06:30:22
中国科技纵横(2015年2期)2015-11-05 02:30:11
电源技术(2015年2期)2015-08-22 11:28:14
浙江理工大学学报(自然科学版)(2015年5期)2015-03-01 02:53:55
科学中国人(2014年16期)2014-11-20 02:50:00
太空探索(2014年1期)2014-07-10 13:41:50
电测与仪表(2014年6期)2014-04-04 11:59:46
电测与仪表(2014年17期)2014-04-04 11:56:54
