
双轴跟踪系统在光伏电站的应用
2016-12-01 08:04:39白云舟
自动化仪表 2016年1期
关键词:光伏电站
李 洁 孔 浩 张 飞 刘 雅 白云舟
(内蒙古科技大学信息工程学院,内蒙古 包头 014010)
双轴跟踪系统在光伏电站的应用
李 洁 孔 浩 张 飞 刘 雅 白云舟
(内蒙古科技大学信息工程学院,内蒙古 包头 014010)
光伏电站组件多为固定角度安装,很大程度上制约了整个电站的发电效率。为提高电站整体发电效率,提出将双轴跟踪系统应用于光伏电站。采用时控法与反馈修正法相结合的追踪方式,主从控制器相配合的分散式与集中式相结合的控制方式,工业以太网与工业级无线相结合的综合式通信方式。理论分析和设计表明,该方法在保证最大发电效率的同时,减少了能量消耗,易于电站推广应用。关键词: 光伏电站 双轴跟踪系统 主从控制器 工业以太网 时控法 反馈修正法
Feedback correction method
0 引言
目前,化石能源日益紧缩,太阳能的利用越来越受关注[1],国内外加大了光伏电站的建设,然而绝大部分电站中光伏组件都是以最佳角度固定安装,虽然这种安装方式较其他角度安装发电效率有所提高,但是光伏方阵总体发电量的提高还受太阳光入射角的制约,从而制约整个光伏电站的发电效率[2-3]。为了提高电站发电效率,本文提出了将双轴跟踪系统应用于光伏电站,控制过程中采用主从控制器相互配合的集中式与分散式相结合的控制方式,提高了整个系统运行的稳定性。采用工业级以太网与无线网络相结合的通信方式,不仅提高了整个系统的灵活性,而且大大减小了施工过程中的条件制约性,具有稳定性好、灵活性强等优点,适合在电站建设中大范围推广。
1 系统总体设计
1.1 天文算法的选择
时控跟踪法的跟踪精度很大程度上取决于天文算法的选择[4],综合比较各种算法后,采用王炳忠提出的太阳赤纬角和Lamm提出的时差算法完成太阳位置的计算。
(1) 太阳高度角计算公式:
sinh=sinφsinδ+cosφcosδcosω
(1)
式中:φ为系统所在地的地理纬度;δ为计算时刻的太阳赤纬角;ω为计算时刻的太阳时角。
王炳忠提出的赤纬角的计算公式[5-6]:
δ=0.372 3+23.256 7sinθ+0.114 9sin2θ-
0.171 2sin3θ-0.758cosθ+
0.365 6cos2θ+0.020 1cos3θ
(2)
式中:θ为日角,由式(3)求得。
θ=2π(N-N0)/365.242 2
(3)
式中:N为积日,从历年的第一天起连续累计的日数,N0由式(4)求得。
N0=79.676 4+0.242 2(year-1985)-
INT(year-1985)/4
(4)
式(1)中还涉及另一个参数ω,单位时间内地球自转的角度为时角,即15°/h,由式(5)求得。
ω=15°×(t-12)
(5)
由式(5)可以看出,12点时刻时角为0°,这就意味着中午12点为太阳高度角最大时刻,但是各个经线上不同地区的地方时各异,计算当地时间时,必须经过精度修正[7]。由于2个区时相差1 h,经度相差15°,所以经度每差1°时差就是4 min[8]。除了经度修正外,还需时差修正,时差的计算y由Lamm提出的计算公式[9],由式(6)求得。
(6)
由此某地的地方时可由式(7)求得。
t=t当地+Et
(7)
综上所述,可求出任意纬度、任意时刻的太阳高度角。
(2) 太阳方位角计算公式:
(8)
由式(8)可以看出,此式有两个解:正解意味着太阳方位角位于正南以西,负解意味着太阳方位角位于正南以东。
结合以上公式及地平坐标系下太阳运动轨迹模型,可以计算出地球上任意位置、任意时刻太阳位置。
1.2 跟踪方案选择
本系统采用时控法与反馈修正法相结合的控制方式,开始时,由当地经纬度、实时时间,通过天文算法计算出当前太阳的高度角h及方位角γ。从控制器根据此信息通过程序处理后发出相应的脉冲、方向信号,驱动执行机构,使光伏组件快速对准太阳的理论位置,完成初步跟踪。由于跟踪过程中存在误差,倾角仪采集光伏组件跟踪后的角度并反馈给从控制器,然后从控制器判断角度偏差是否在允许范围内,如果超出该范围,控制器输出相应的脉冲完成微调,使偏差角度达到偏差要求,偏差在允许范围内系统重复上述过程,完成整个跟踪过程。
1.3 控制方式的选择
目前主流的控制方式主要分为:集中式控制、分散式控制、集中式与分散式相结合的控制方式[10],综合比较以上种方法优缺点及电站运行特点后,该系统采用主从控制器相互配合集中式与分散式相结合的控制方式。控制方式拓扑图如图1所示。
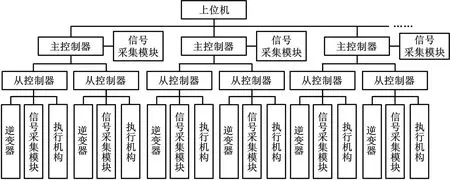
图1 控制方式拓扑图
如图1所示,主从控制器相互配合组成了整个控制系统,主控制器采用比从控制器运算速度快、处理信息量大的CPU,主要完成对从控制器信息的传输,信号模块信息采集,特殊天气下的集控;每个从控制器完成太阳位置计算,逆变器发电量信息采集,响应反馈信息发出相应脉冲完成对执行机构的驱动,从而实现对太阳的追踪。
1.4 通信方式的选择
考虑到光伏电站面积大、布线比较困难的特点,本系统采用性价比较高的综合式通信接入方案,采用无线和硬线结合的方式。
信号采集模块与从控制器之间为硬线连接,逆变器与从控制器通过工业总线连接,从控制器之间的通信方式为硬线连接的Profinet网络。主控制器之间、主控制器与上位机之间采用西门子工业级无线通信网络。综合式通信方式既可以减少有线式连接的施工费用,也可以灵活地确立通信方案,性价比较高。
2 系统的硬件设计
本系统硬件主要由远程监控模块、现场HMI模块、跟踪控制系统、无线通信模块、信号采集模块、驱动模块及外围电路组成。
远程监控模块,完成对整个系统电能质量及运行状态的远程实时监控;现场HMI模块,实现对支架运行状况进行本地组态显示;跟踪控制系统,由主从控制器组成,主控制器为西门子S7-1200CPU1217C,从控制器为CPU1214C,两者相互配合保证了整个系统稳定运行;无线通信模块,采用西门子SCALANCEW系列产品,是连接控制系统与远程监控系统的桥梁;信号采集模块,主要由总辐射传感器、温度传感器、风速传感器、倾角仪组成,协助控制系统完成相应的控制策略;驱动模块,为直流电机与减速器组成的推杆,带动跟踪支架转动完成追踪。
3 系统软件设计
系统的软件结构设计主要分为两个部分:自动跟踪主程序、HMI程序设计。
3.1 自动跟踪主程序设计
自动跟踪主程序是在从控制器内用SCL语言编写并实现,完成太阳高度角及方位角的计算以及根据采集模块采集到信息制定相应的控制策略,跟踪流程图如图2所示。

图2 主程序流程图
如图2所示,开始时从控制器根据所在地地理信息计算出当天的日出日落时间,将该时间段做为设定值,然后读取实时时间,判断该时间是否在该时间段内,如果不在则系统复位回到初始位置;若时间在该时间段内,进一步读取总辐射传感器测得的总辐射值。当辐射值大于设定值(阴雨天辐射值)时,系统开始启动追踪,计算出太阳高度角及方位角,然后根据时间所处的时间段,按照方位角和高度角各自的跟踪间隔模式来调整太阳能电池板阵列的位置。该动作完成后接收来自倾角仪的反馈值,将反馈值与理论值做差,判断差值是否在允许的范围内,如果在范围内则重复上述过程,如果不在范围内系统做出微调后回到正常的跟踪模式下。如果辐射值小于设定值,系统延时后再判断,当控制器接收到的辐射信号满足要求时,系统重复上述过程。所有从控制器的控制策略相同,彼此相互独立,保证整个系统的稳定工作。
特殊天气下,通过远程或本地监控向主控制器发出相应命令,使光伏组件处于最佳受保护角度,减少整个电站光伏组件的损坏率。
3.2 HMI程序设计
随着科技的飞速发展, 越来越多的机器与现场操作都趋向于使用人机界面[11],本系统通过HMI程序设计完成对电站运行情况及发电量信息的远程及本地监控。监控画面涉及的信息比较全面,包括了某个支架运行情况、使用地的地理信息及该地实时太阳高度角及方位角、支架的实时发电量及总发电量、节能减排的效果等。HMI除具有实时监测功能外,还可以实现简单控制,包括顺时针及逆时针对跟踪角度的校正以及以任意角度进行手动调节。
4 运行结果分析
抽取某日某个时间段跟踪数据,观察跟踪效果,理论值为计算公式计算所得值,实际值为跟踪后倾角仪反馈值,运行结果如表1所示。

表1 运行结果
通过该时间段内运行结果表明,高精度倾角仪及控制算法的应用使跟踪精度稳定在10%之内,在保证跟踪精度的前提下很大程度上提高整个电站的发电效率。
5 结束语
时控法与反馈修正法相结合的追踪方式,实现了系统的闭环控制,高精度的太阳位置算法与倾角仪相互配合保证了整个系统跟踪的精确度;主从控制器相配合的分散式与集中式相结合的控制方式,具备了开发成本低、开发周期短、稳定性强的优点,很大程度上增加了整个系统运行的稳定性;工业以太网与工业级无线相结合的综合式通信方式,在减少前期施工量的同时增加了系统通信方案的灵活性。综上所述,该系统非常适合在光伏电站内大范围推广。
[1] 于静,车俊铁,张吉月.太阳能发电综述[J].世界科技研究与发展,2008,30(2):56-59.
[2] Banat F,Jumah R,Garaibeh M.Exploitation of solar energy collected by solar stills for desalination by membrane distillation[J].Renewable
Energy,2005,32(3):425-434.
[3] Eke R,Senturk A. Performance comparison of a double-axis sun tracking versus fixed PV system[J]. Solar Energy,2012,86(9):2665-2672.
[4] Clifford M,Eastwood J.Designed of a novel passive solar tracker[J].Solar Energy,2004,77(3):269-280.
[5] 王炳忠,刘庚山.日射观测中常用天文参数的再计算[J].太阳能学报,1991,12(1):27-32.
[6] 吕芳,江燕兴,刘莉敏,等.太阳能发电[M].北京:化学工业出版社,2009.
[7] 张瑜,路博.一种高精度的太阳跟踪方法[J].可再生能源,2012,30(2):103-106.
[8] 谈小生,葛成辉.太阳角的计算方法及其在遥感中的应用[J].国土资源遥感,1995,6(2):48-57.
[9] 刘四洋,伍春生,彭燕昌,等.主动式双轴太阳跟踪控制器[J].可再生能源,2007,25(6):69-72.
[10]刘丽红,白建云,孔祥杰.DOAS在大气环境质量监测中的应用[J].电力学报,2012,27(3): 221-223,226.
[11]吕品.PLC和触摸屏组合控制系统的应用[J].自动化仪表,2010,31(8):45-51.
Application of the Dual-axis Tracking System in Photovoltaic Power Station
The subassemblies in photovoltaic (PV) power station are mostly installed in fix angle, this largely restricts the power generation efficiency; in order to increase the overall generation efficiency of the power station, the application of dual-axis tracking system in PV power station is proposed. In the system, the tracking mode of combining time-control method and feedback correction method is used; and the master-slave decentralized and centralized control mode is adopted; as well as the combination of industrial Ethernet and industrial wireless communication mode is selected. The theoretical analysis and design show that this method can ensure the maximum generation efficiency and reduce the energy consumption at the same time, so it is easy to be promoted in application of power stations.
Photovoltaic power station Axis tracking system Master-slave controller Industrial Etherret Time-control method
李洁(1965-),女,1994年毕业于北京科技大学自动化专业,获硕士学位,副教授;主要从事新能源、工业过程控制的研究。
TP273;TH86
A
10.16086/j.cnki.issn1000-0380.201601014
修改稿收到日期:2014-12-10。
猜你喜欢
科技与创新(2016年24期)2017-03-30 15:40:52
电子技术与软件工程(2017年1期)2017-03-06 20:35:15
中国科技博览(2016年24期)2016-12-28 23:18:09
中国科技纵横(2016年20期)2016-12-28 16:50:32
中国科技纵横(2016年20期)2016-12-28 16:46:09
科技创新与应用(2016年34期)2016-12-23 19:55:03
中国集体经济(2016年27期)2016-11-19 12:50:23
科技传播(2016年7期)2016-04-28 00:07:11
科技视界(2016年9期)2016-04-26 01:00:50
科技与创新(2015年19期)2015-10-14 04:56:29
