基于电流滞环的开关磁阻电动机控制方法
2016-11-30 02:17:33程宁宁赵德勇王永生
微特电机 2016年2期
黄 辉,程宁宁,胡 杨,赵德勇,汪 磊,王永生
(1.合肥工业大学,合肥 230009;2.国网安徽省电力公司 宣城供电公司,宣城 242000)
基于电流滞环的开关磁阻电动机控制方法
黄 辉1,程宁宁2,胡 杨1,赵德勇1,汪 磊1,王永生1
(1.合肥工业大学,合肥 230009;2.国网安徽省电力公司 宣城供电公司,宣城 242000)
在开关磁阻电动机系统中电流斩波控制和角位置控制是最常用的主要有两种控制方式。介绍了一种电流内环采用滞环控制的开关磁阻电动机控制方法。通过设定滞环环宽,将电机相电流控制在给定电流上、下一个环宽内,这样既可及时迅速地跟踪给定的电流,避免电机起动过程中的电流过大现象,又能快速地响应外环转速的变化,实现快速稳定的控制电机。内环采用新型的滞环电流控制后,简单有效地解决了传统控制策略中电流斩波动态响应慢、角位置控制复杂的弊端。
开关磁阻电动机;电流滞环;控制策略
0 引 言
开关磁阻电动机控制系统兼具传统交、直流调速系统各自的优点,是继交流变频调速系统、直流无刷电机调速系统后的一种新型无级调速系统[1]。开关磁阻电动机(以下简称SRM)的定子和转子都是凸极形式,转子上既无绕组又无永磁体,通过硅钢片叠压而成,绕有简单的集中式绕组的叠压而成硅钢片构成了定子。因此,SRM在结构上具有简单牢固的特性,运行可靠、维护方便,对环境要求低且成本低廉;控制上具有较广调速范围、较大的起动转矩、较小的起动电流等,这些优势决定了SRM在各个领域都有着广泛的运用。
SRM的控制策略大多采用角位置控制和电流斩波控制[2]。角位置控制不足之处在于低速性能不好,当转速减小时,感应电动势会因为电感的变化而减少,因此电流的峰值会增大,需要进行限流处理。角位置控制过程中,开关元器件在导通期间会一直处于导通状态,相电流大小是不可以调控的,相应的电流变化率很大,对开通角和关断角的变化影响较大,同样在控制上存在一定的困难。同时,针对转速与转矩所确定的某一运行时刻,开通角和关断角的组合形式是多种多样,不同的组合形式对应着不同的特性,具体控制起来相对复杂,且结果很难达到预定的效果。因此,角位置控制更适合在短时间内电流快速达到给定值[3-5]。
对于电流斩波控制,电流是锯齿状,当速度降低时,功率开关器件的开关频率将会随之增大,转矩脉动也会随着增大,造成的振动与噪声也会变得严重。除此之外,还存在着动态响应慢的问题,输出转矩因电流限幅而受限,无法快速的响应扰动带来的转速突变[6-7]。
本文介绍一种电流内环采用滞环控制的SRM控制方法。这种控制方式具有以下优势:1)起动时能限流起动,减小由于起动电流过大对控制器及电机造成的冲击;2)缩短了起动、停车时间,起动时采用大电流起动,停车时同样也采用大电流停车;这样实现了快速的起动、停车; 3)采用内环电流滞环后,使得电机相电流能够快速地跟随电流给定值,可以得到平稳的电流波形,电流平稳,缩小控制器的容量,提高电机的效率;4)有效地降低SRM的噪声。
1 数学模型
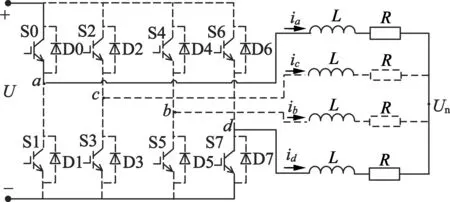
图1是SRM的控制系统的硬件架构图,它包括主电路和控制电路两部分。
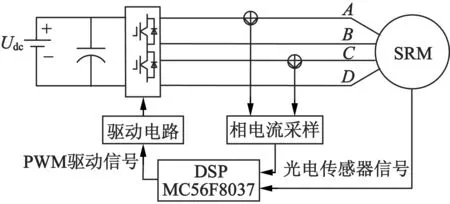
图1 SRM控制系统的硬件架构图
在忽略漏磁的情况下,磁通全部由气隙进入转子,由于铁心磁导率可视为无穷大,铁心表面可视为等磁位面,故气隙磁通与定、转子极弧表面垂直,在这种情况下,气隙磁导仅由定转子相互重叠部分的弧角度大小所决定,是转子位置角θ的函数[8]。如图2所示,可看出电感也是转子位置角θ的函数,因为电感与磁导成正比。

图2 SRM线性电感特性
当转子极运转到定子两极中间时,此时有最小的气隙磁导,最小的电感值Lmin;转子极运转到转子极弧与定子极弧重合的过程中,绕组电感值随着转子位置角θ的增加而线性增大;当完全重合时,电感有最大值Lmax。在重合区间,电感保持最大值不变。当转子极继续运转,位置角θ继续增大,定子极弧与转子极弧的重叠部分将逐渐地线性减小,对应的电感也将随之减小。此过程,电感值L(θ)和位置角θ的变化关系如图2所示,则理想电感可表示:
(1)
式中:k为一系数。
设SRM的相电压为u,相电阻为R,相电流为i,则相电压方程:

(2)
(3)
式中:ψ为磁链;e为相电动势。
每相绕组的电磁功率:
(4)
根据量纲关系易知:
(5)
2 换流模式分析
实验中以四相8/6极SRM为平台,现就此平台分析换流模式。采用两相导通星形两相四状态控制模式,每一时刻都有两相导通。以A,D相导通为例进行环流模式分析,A相桥臂处于调制状态,D相下管处于常通状态,C相上下管全部关断。
图3为电机电动状态下采用滞环控制的瞬时电流波形。ih为滞环环宽,iref为电流给定值。t0时刻,ia达到滞环的下限值,S0导通,ia逐渐增大。当ia=iref时,滞环控制器HBC仍输出高电平,S0持续导通,ia继续增大,直到t1时刻,ia=iref+ih/2,滞环输出发生翻转,S0关断;由于电机绕组的存在,电流通过D1续流,ia逐渐减小。直到t2时刻,ia=iref-ih/2,滞环输出再次发生翻转,再次使S0导通。这样S0与D1交替导通,S3处于常通状态,使输出电流ia与给定值iref的差值保持在±ih/2范围内。
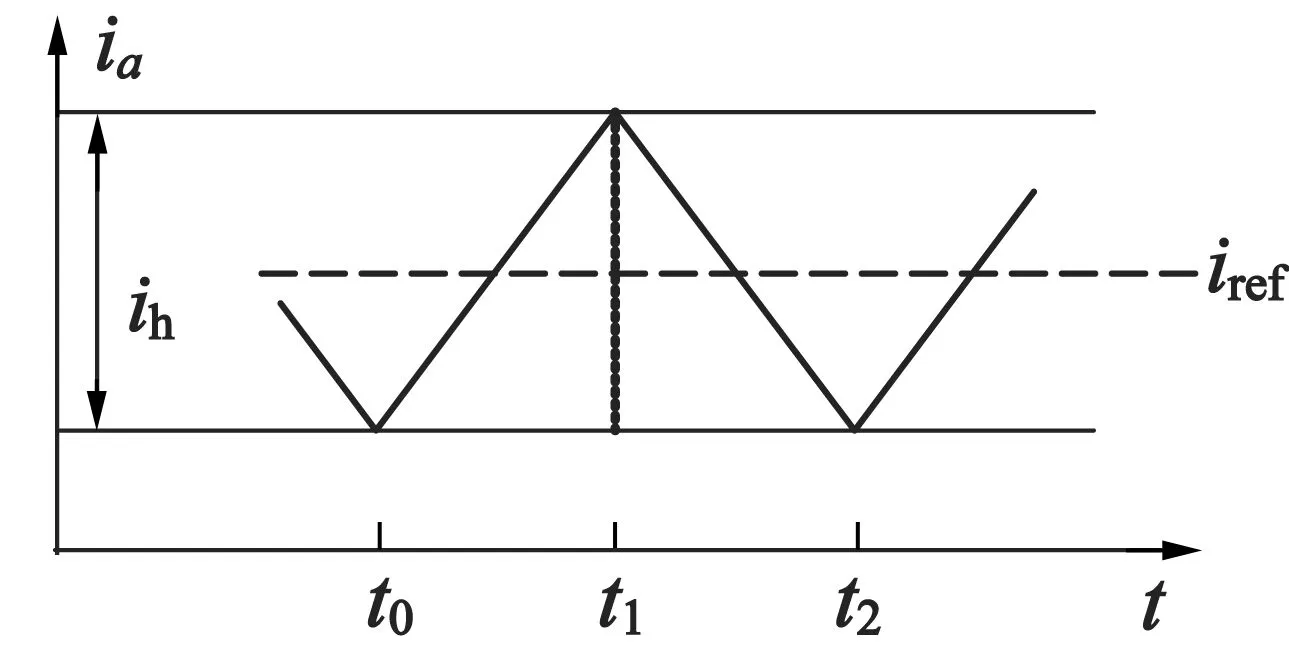
图3 电动状态下滞环控制的瞬时电流波形
图4(a)为电动状态下A上D下导通状态的环流模式。电动势平衡方程:
(6)
式中:U为直流侧电压,对应图3中t2~t3时段,S0导通,电流增大。
图4(b)为电动状态下A下D下导通状态的环流模式。电动势平衡方程:
(7)
对应图3中t3~t4时段,D1导通,电流减小。
图4(c)为电动状态下A下D下导通状态的环流模式。电动势平衡方程:
(8)
这种模式工作在换相的过程,目的是快速减小换相电流,抑制电磁转矩波动,从而达到降低开关磁阻电动机噪声。
(a) 电动状态下S0,S7导通拓扑

(b) 电动状态下D1,S7导通拓扑
(c) 电动状态下D1,D6导通拓扑
图4 电动状态下的电流换相模式
3 控制策略
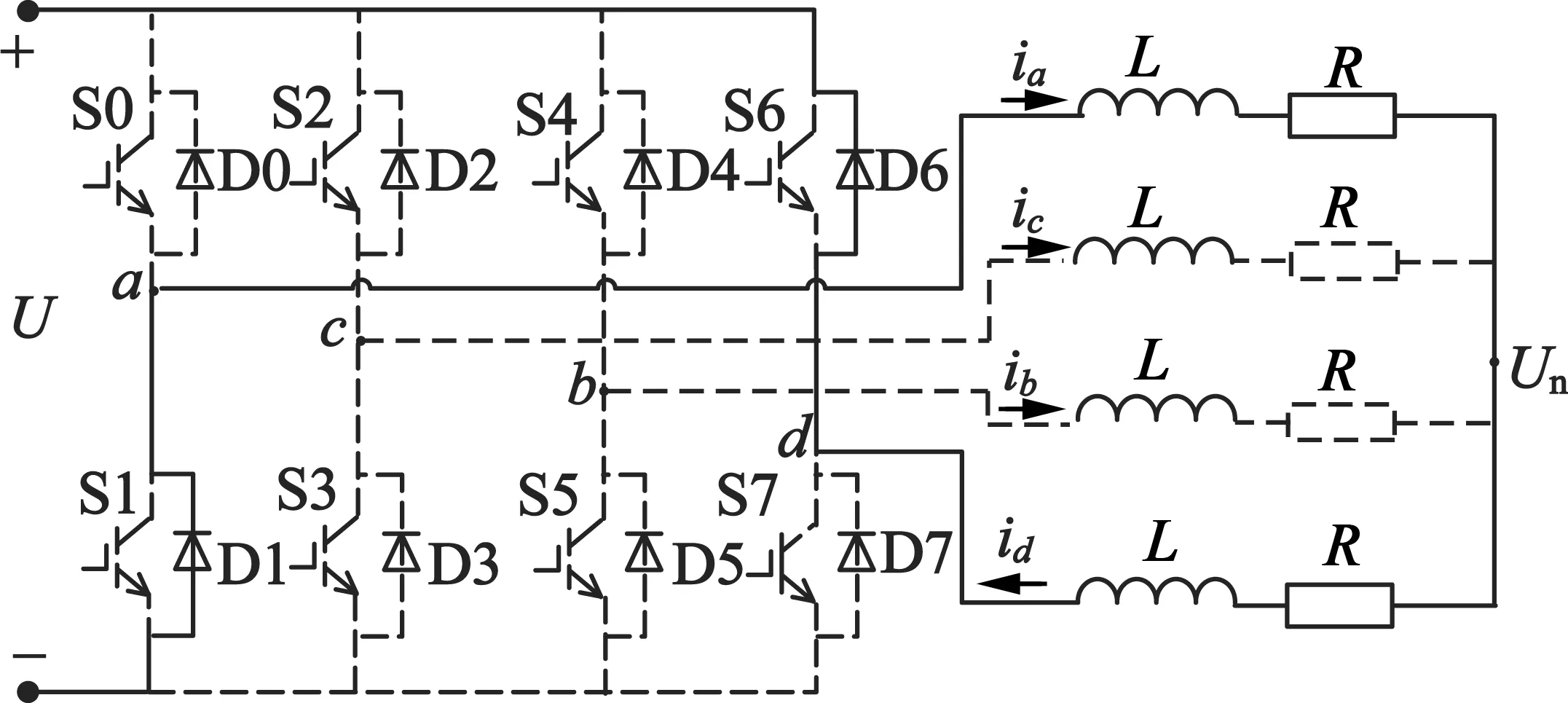
图5是内环采用电流滞环控制双闭环结构图[9],KT为电机转矩系数,J为转动惯量。
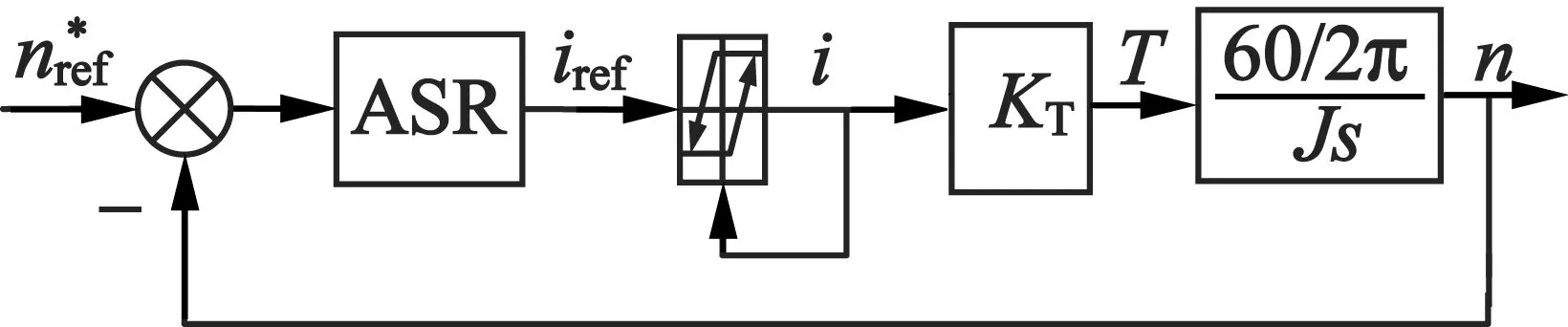
图5 电流滞环控制的双闭环结构图
图5的双闭环系统中,转速外环调节器ASR应具有良好的抗干扰能力,则按照典型Ⅱ系统设计,选择PI调节器[10-12],外环控制规律:
(9)
式中:Knp,Kni分别为转速外环比例、积分系数。
电流内环采用滞环控制。将实际转速与给定转速的差值送入转速调节器ASR,得到电流的给定值iref,通过对电流进行比较,系统直接输出高电平或低电平,使电流迅速跟踪给定电流。电流内环采用滞环控制的双闭环控制系统如图5所示。电流滞环控制的A相原理图如图6所示。
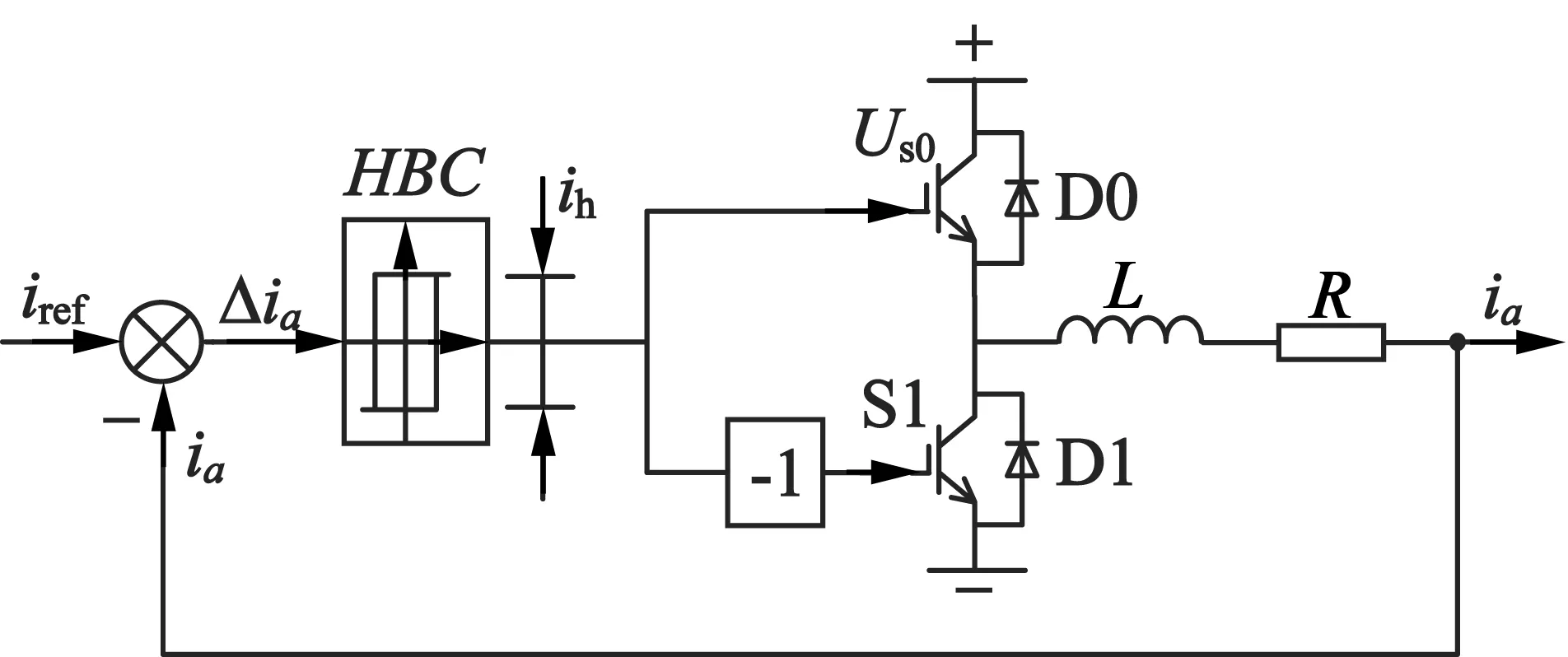
图6 电流滞环控制的A相原理图
4 实验结果与分析
实验中用到的控制芯片是Freescale的DSPMC56F8037;电机是四相8/6极SRM,电机参数如表1所示。
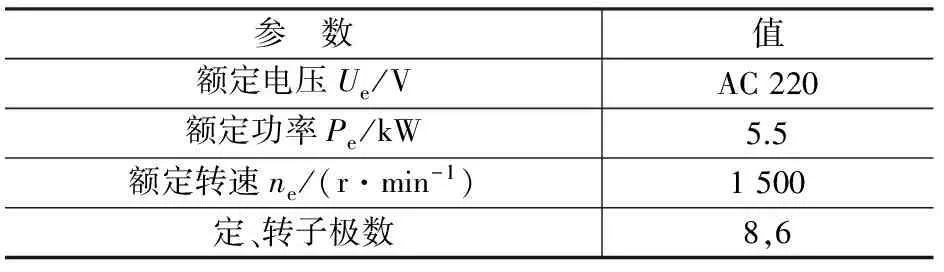
表1 电机参数
图7是SRM空载起动的波形。从图7中可以看出,电机空载时以最大电流起动,转速迅速达到设定的给定值,随后电流、转速达到稳定。
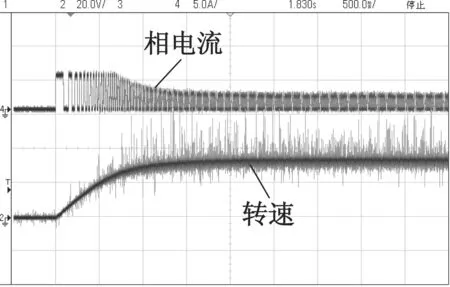
图7 电流滞环控制下SRM空载起动波形(截图)
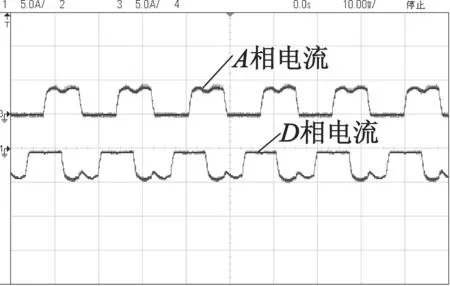
图8是在40%的额定负载下,电流滞环控制模式下不同转速对应电机相电流波形。从图8可以看出,随着给定转速的增大,由于采用转速外环、电流内环的控制方法,电机相电流幅值随着增大。在电机从C,D相导通切换到A,D相导通的换相过程中,为了快速使换相电流降低,减少转矩波动,采用了图4(c)的拓扑,但这种方法对D相的电流造成波动。从图中可以看出,随着电机相电流的增大,这种波动越来越明显。
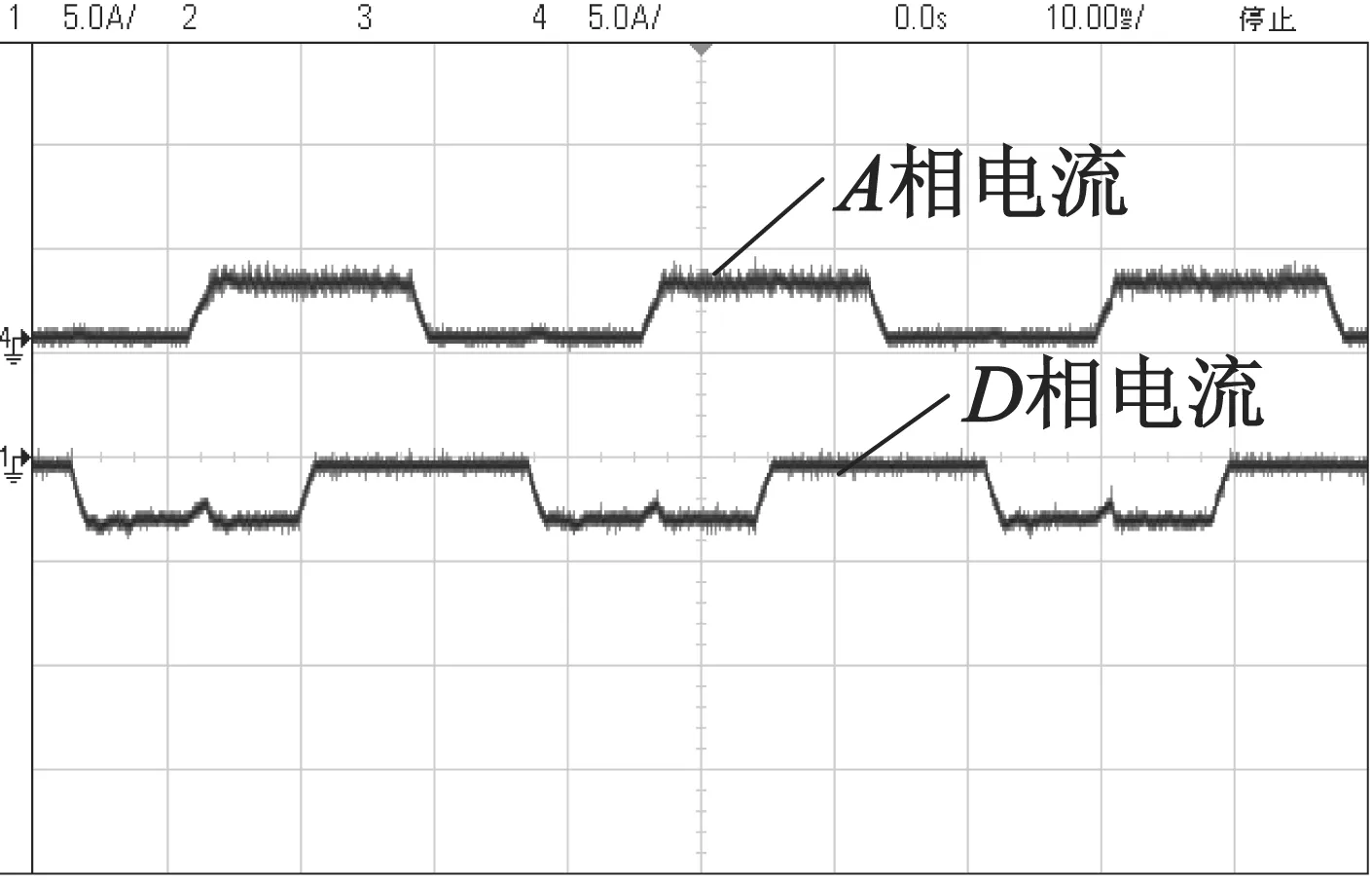
(a) n=300 r/min

(b) n=600 r/min

(c) n=1 000 r/min
图9是北京某公司生产的SRM控制器,在40%的额定负载下,角位置控制模式下不同转速对应电机相电流波形。从图9中可以看出,在换相的过程中,随着转速的增加,相电流的波动会越来越明显,造成了转矩的波动,产生较大的噪声污染。
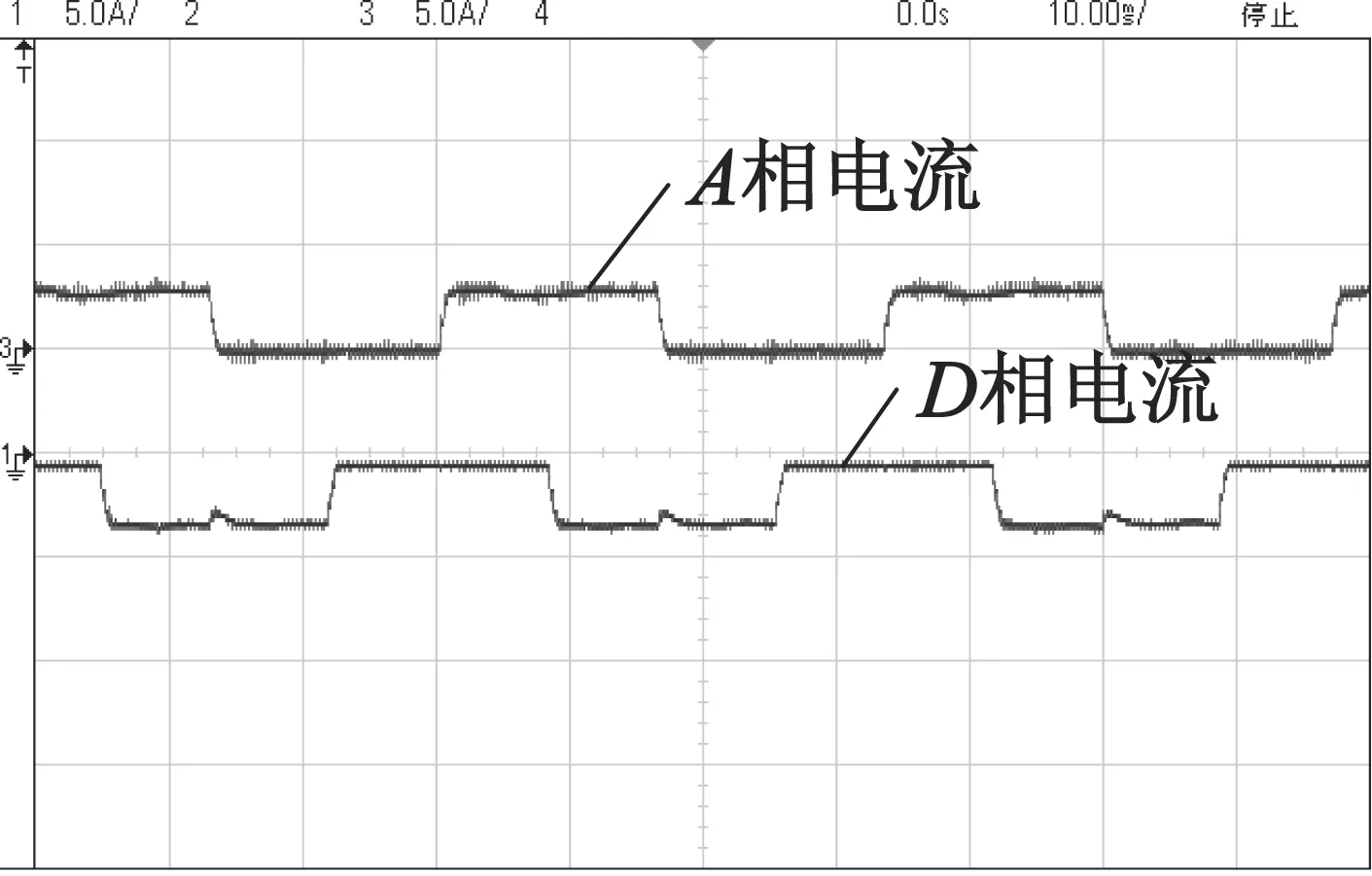
(a) n=300 r/min
(b) n=600 r/min
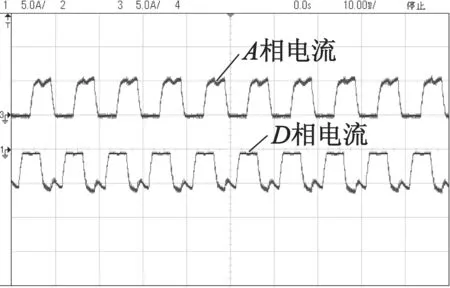
(c) n=1 000 r/min

表1 噪声对比实验
表1中,控制器1是本实验设计用到的,控制器2是北京某公司生产的,如图10所示。实验中负载为40%的额定负载,硬件实验平台如图11所示。

图10 北京某公司生产的SRM控制器
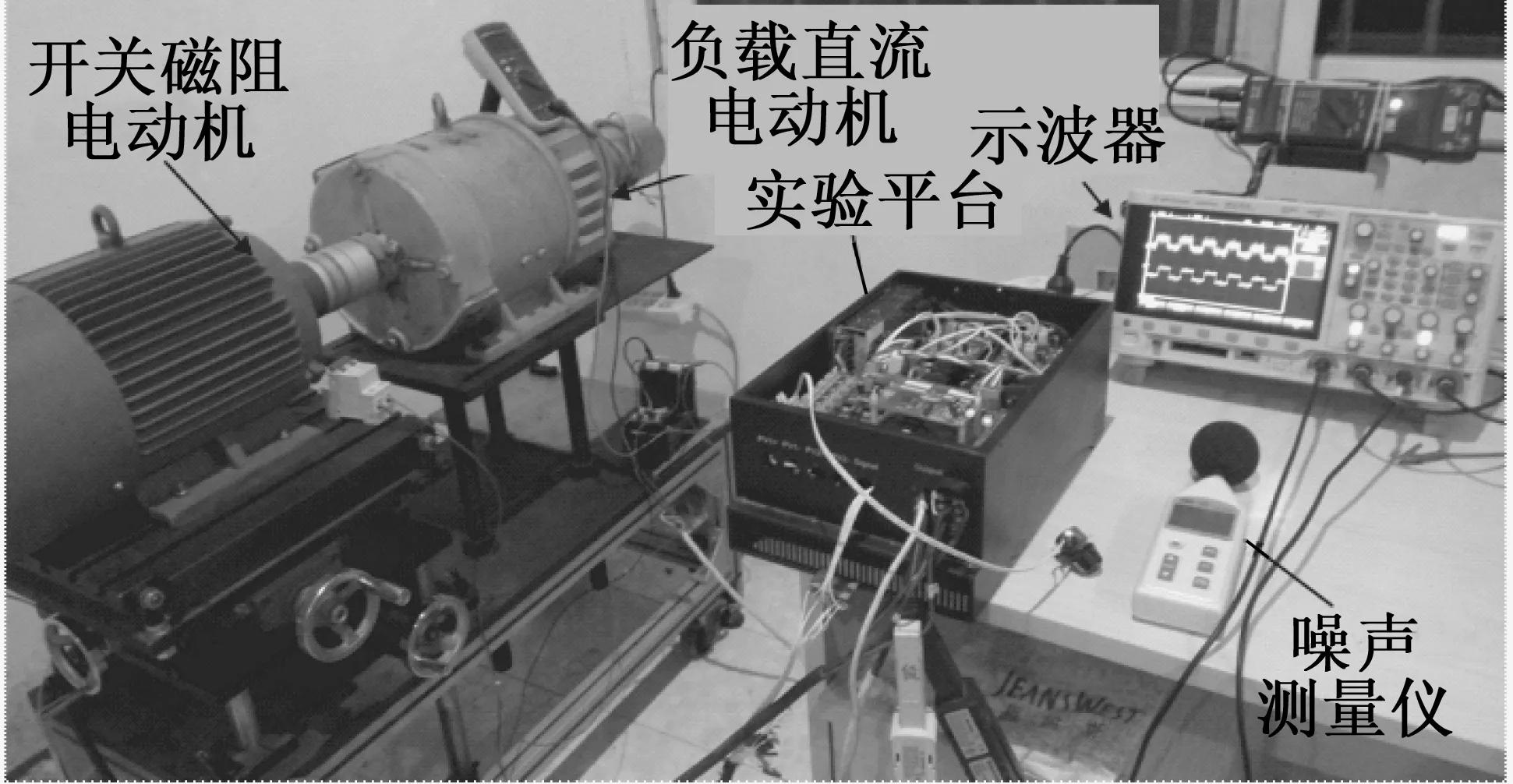
图11 硬件实验平台
5 结 语
本文将滞环控制应用于SRM调速系统的内环控制上,结合转速外环的PI调节控制,构成双闭环调速系统。得出以下结论:
(1)在电机起动过程中,能保持较大电流快速起动;在电机空载和带载情况下,能保持转速稳态无静差;在电机调速过程中,能够更迅速地完成调速过程,达到稳态。
(2)整个实验过程中,采用内环电流滞环后,使得电机相电流能够快速地跟随电流给定值,得到平稳的电流波形。
(3)SRM一直存在噪声的问题,通过噪声的对比试验,这种控制策略在降低SRM的噪声有了很好的效果。
[1] 李安来.开关磁阻电动机控制系统的设计[D].西安:西安科技大学,2012.
[2] 刘迪吉.开关磁阻调速电动机[M]北京:机械工业出版社,1994.
[3] 詹琼华.开关磁阻电动机[M].武汉:华中理工大学出版社,1992.
[4] 吴建华.开关磁阻电动机设计与应用[M].北京:机械工业出版社,2000.
[5] 王宏华.开关型磁阻电动机调试控制技术[M].北京:机械工业出版社,1995.
[6] 候栋,李江,王世山.基于开关磁阻电动机的角度斩波控制研究[J].微特电机,2012,40(12):49-52.
[7] 聂兵.开关磁阻电动机的工作原理分析[J].工业控制计算机,2011,(5):5-6.
[8] 程明.微特电机及系统[M].北京:中国电力出版社,2008.
[9] 许晓峰.电机与拖动[M].北京:高等教育出版社,2009.
[10] 王孝武.现代控制理论基础[M].北京:机械工业出版社,1998.
[11] 陈伯时.电力拖动自动控制系统[M].北京:机械工业出版社,2003.
[12] 王成元,夏加宽,孙宜标.现代电机控制技术[M].北京:机械工业出版社,2008:104-139.
The Method of Switched Reluctance Motor Based on The Current Hysteresis Control
HUANG Hui1,CHENG Ning-ning2,HU Yang1,ZHAO De-yong1,WANG Lei1,WANG Yong-sheng1
(1.Hefei University of Technology,Hefei 230009,China;2.State Grid Electric Power Company of Anhui Xuancheng Power Supply Company,Xuangcheng 318020,China)
There are two most common methods, current chopping control and angular position control in the switched reluctance motor control system. The control method of switched reluctance motor with a current hysteresis control was introduced. Compared with a given current, the motor phase current wias controlled within a certain ring width by setting the hysteresis loop width. It can quickly track the given current to avoid that electrical current during startup is too large, and can quickly respond to changes in the rotational speed of the outer ring to achieve fast and stable control of the motor. After using the new inner hysteresis current control, it is a simple and effective solution for problems of the traditional control strategy such as slow chopping current dynamic response and complicated angular position control drawbacks.
switched reluctance motor; current hysteresis; control strategy
2015-02-04
TM352
A
1004-7018(2016)02-0071-04
猜你喜欢
包装工程(2023年16期)2023-08-25 11:39:16
防爆电机(2021年4期)2021-07-28 07:42:46
测控技术(2018年2期)2018-12-09 09:00:56
电子设计工程(2017年20期)2017-02-10 03:40:05
腹腔镜外科杂志(2016年12期)2016-06-01 12:10:09
腹腔镜外科杂志(2016年11期)2016-06-01 12:10:09
电测与仪表(2016年6期)2016-04-11 12:07:58
电机与控制应用(2015年7期)2015-03-01 03:50:12
电机与控制应用(2015年1期)2015-03-01 03:49:08
上海电机学院学报(2013年3期)2013-03-11 18:07:59