
关于目标跟踪的信息共享策略研究*
2016-11-30 07:44文猛,刘行,李牧
通信技术 2016年8期
文 猛,刘 行,李 牧
(解放军理工大学,江苏 南京 210007)
关于目标跟踪的信息共享策略研究*
文 猛,刘 行,李 牧
(解放军理工大学,江苏 南京 210007)
数据融合即利用计算机在一定的准则下对获得的若干观测信息进行自动分析、综合,以实现所需的决策和评估任务而进行的信息处理。高速、低成本及高可靠性的数据融合技术,不仅在军事领域得到了广泛应用,而且在自动化制造领域、商业部门乃至家庭都有特别广阔的应用前景。重点对数据融合过程中的信息共享策略进行描述,将当前几种主流的分发策略进行分析比较,指出目前还存在的一些问题,得出结论:应用在具体场景中时,要视实际环境、现实需求来决定所应用的分发策略,而目前的几种分发策略应用局限性均较大,对实用性较强的信息共享策略的研究空间还很大。
数据融合;信息共享策略;抽取;目标跟踪
0 引 言
将表示相同真实对象的多个数据和知识集成为一致、准确和有用的信息的过程,即为数据融合。数据融合的概念最早是由美国海军提出并开展研究的,主要用于对敌潜艇的多声呐协同检测。随着时代的开放,战争立体化,战场环境复杂化,新型武器的应用,探测范围扩大化,传感器种类的多元化,人们对检测精度和实效性的要求不断提高,也使得数据融合的地位不断提升。目前,数据融合不再局限于军事应用,已逐渐发展为多学科、多部门、多领域共同关心的共性关键技术。关于数据融合的理论和应用研究十分活跃,该文重点讨论数据融合过程中的信息共享策略(Information Sharing Strategies,ISS)[1]。
研究信息共享策略的目的是为了确保分布式跟踪融合系统中各节点之间实现“无缝”的、自适应的、基于需求的信息共享。为了达到最优分布式信息融合性能,其必须确保最小化通信延迟及最大化信息吞吐量[2-4]。为了实现上述要求,需要考虑的主要因素包括:节点与目标之间的几何位置、单个节点内传感器的性能、信息时延的约束、通信速率或带宽约束、系统跟踪能力、避免冗余数据和乱序数据的产生等。
从多传感器的信息流动形式和综合处理层次上进行功能解构,数据融合有四种主要的实现结构:集中式、分布式、混合式和多级式结构[5]。在众多结构中,在不考虑硬件计算能力和数据传输带宽的情况下,集中式的处理最优,可获得全局最优估计。然而,实际应用中,存储空间、计算性能、传输带宽等硬件不能满足集中式的要求。同时,因为系统只有一个融合节点,路由单调,导致系统鲁棒性差,容易被破坏,在工程实现上比较困难。相对而言,分布式传感器系统有很多优势,包括更大的覆盖范围,鲁棒性好,协作感知能力强。本文主要讨论分布式系统中的信息共享策略。
1 跟踪原理
1.1传输数据类型
在目标跟踪领域,各节点之间交换的数据类型主要包括相关量测报告(Associated Measurement Report,AMR)和相关航迹报告(Associated Track Report,ATR)。前者是传感器原始量测经过点迹与点迹关联、点迹与航迹相关等预处理后的相关量测数据,也称之为目标点迹数据,主要包含传感器量测值信息、量测时戳值信息、传感器偏差值信息和传感器坐标位置信息等;而后者是在前者的基础上做了滤波等相关处理后的目标状态估计,也称之为目标航迹数据,主要包含目标状态估计值信息、目标状态估计误差协方差阵信息、状态估计质量信息、状态估计时戳信息和传感器坐标位置信息等(不做特殊说明,以下信息格式均为AMR)。
利用前次融合时刻至今的所有传感器量测数据序列来产生新的目标状态估计和误差协方差矩阵,称为子航迹(Tracklet)[6],能有效减小信息共享时所需的通信带宽。假设产生每个Tracklet信息中所包含量测的个数为n,那么传输Tracklet信息所需的通信速率是广播航迹信息方式所需通信速率的1/n。
1.2卡尔曼滤波方程
在分布式系统中,对于收到信息的节点,处理信息时均使用卡尔曼滤波的方法。卡尔曼(Kalman)滤波[7]可以利用线性系统状态方程,通过系统输入输出观测数据,对系统的状态进行最优估计,下面简单的展示信息滤波的方式和每一个节点需要处理的信息。
目标状态矢量是一个3D位置和速度:x=[ px, py, pz, vx, vy, vz]T,F(k)是状态转移矩阵,有一个0均值高斯噪声wk,因此xk=Fkxk-1+wk。因为多数雷达不擅长速度测量,观察矢量仅仅是位置:z=[ px, py, pz]T,zk=Hkxk+vk。这里zk是时刻k的观察值,Hk是观察矩阵,vk是观察噪声。Rk是观察噪声协方差。这些方程通过不同Hk和Fk的参数使用,公平地应用在线性和非线性方式。目标状态估计是被给出所有过去观察的x的期望这里协方差被称为P(k | k)。
每一个节点i通过合成每一个节点j的贡献,维持一个全局滤波器:

信息矩阵表示为:

信息共享策略需要每一个节点掌握全局滤波器和本地自己的滤波器。每一个节点将量测加入基于所有或者一些当地航迹的一部分的子航迹量测报告中。这样,设定一定的阈值,判断全局过滤器的协方差是否优于新的本地状态协方差,然后决定是否发送子航迹。
2 分布式传感器信息共享策略
在当前目标跟踪的研究中,分布式信息共享策略主要有广播式、分配报告责任式、节点抽取方式以及基于马尔科夫决策的数据流控制方法。
2.1广播式
目标位置的最优估计是可以实现的。如果我们采用的信息共享方式是广播式,即每一个传感器节点将自身的数据发送给所有网内的节点,那么简单而言,系统中的每一个节点均为集中式系统中的融合中心,理论上每一个节点均得到了所有网内传感器探测到的原始量测数据。美军CEC系统即采用这样的结构,在全部成员间共享原始量测信息,通信带宽约为2~5 Mb/s,能提高对整个作战区域全面、精确的态势感知能力。由于通信带宽的局限,该类系统的节点数较少。CEC系统目前只能容纳20~30个成员。
广播式信息共享是最为原始、最为简单的信息共享方式。虽然可以得到目标位置的最优估计,但在实际系统的应用中,随着节点数和目标数的增多,若采用简单的广播式共享方式,一方面会导致系统通信需求的剧增,在通信瓶颈的约束下不可能实现,另一方面会产生大量的冗余信息,若重复使用这些冗余信息,系统内不同节点产生的融合估计值就会相互干扰,并使得融合跟踪精度下降剧烈。此外,它还直接决定着各节点全局融合中心融合算法的适用性和性能。
采用子航迹的数据格式能大大降低通信带宽的要求,解决带宽的部分问题,但是会导致信息的延时、战场态势图等作战信息显示不及时,从而影响使用效能。
2.2分配报告责任式
研究较早且得到广泛应用的成果是基于网络中心跟踪形式下分配报告责任式的信息共享策略[8]。它是为了最小化通信带宽的需求,以跟踪精度为依据分配报告责任。主要思想:如果一个节点将本节点探测的某一目标估计数据通过通信链路发送给其他节点,则该节点对该目标的估计信息具有报告责任。为了减小通信网络的通信量,降低系统结构的复杂度,一般情况下,每个目标估计只有一个网内成员(节点)具有报告责任。是否具有报告责任是以跟踪精度为依据的。当多个节点成员同时跟踪到一个目标时,则跟踪精度高者具有报告责任。由于该策略在共享信息过程中,采用对比跟踪精度来决定报告责任方,而不需要传送目标估计误差方差阵,使得通信量大大减少,即其最大的优势在于最小化通信需求以及在网络内各节点间形成对所有目标的共同感知。由于没有综合多个节点数据进行融合处理,所以其不足在于精确性和实时性不能满足对一些特定目标的跟踪。
在Link16中,航迹质量TQ是参与单元确定报告职责的重要依据[9]。TQ用0-15的数字表示,数值0表示非实时报告值,1-15表示位置数据可信度的不同程度。数值越高,表示可信度越高,数值15表示可信度最高。在Link16中,确定TQ值的方法如下:假设S为航迹0.95的概率落入地理位置面积的大小,目标位置投影到本地切平面的二维笛卡尔坐标为(x,y),位置协方差为互协方差则:

其中:
利用以上公式可得到S,然后根据表1即可确认TQ值。因为雷达本地球坐标变化为直角坐标实际上是非线性的,计算时使用正态假设是否合适,其可信度是值得商榷的。
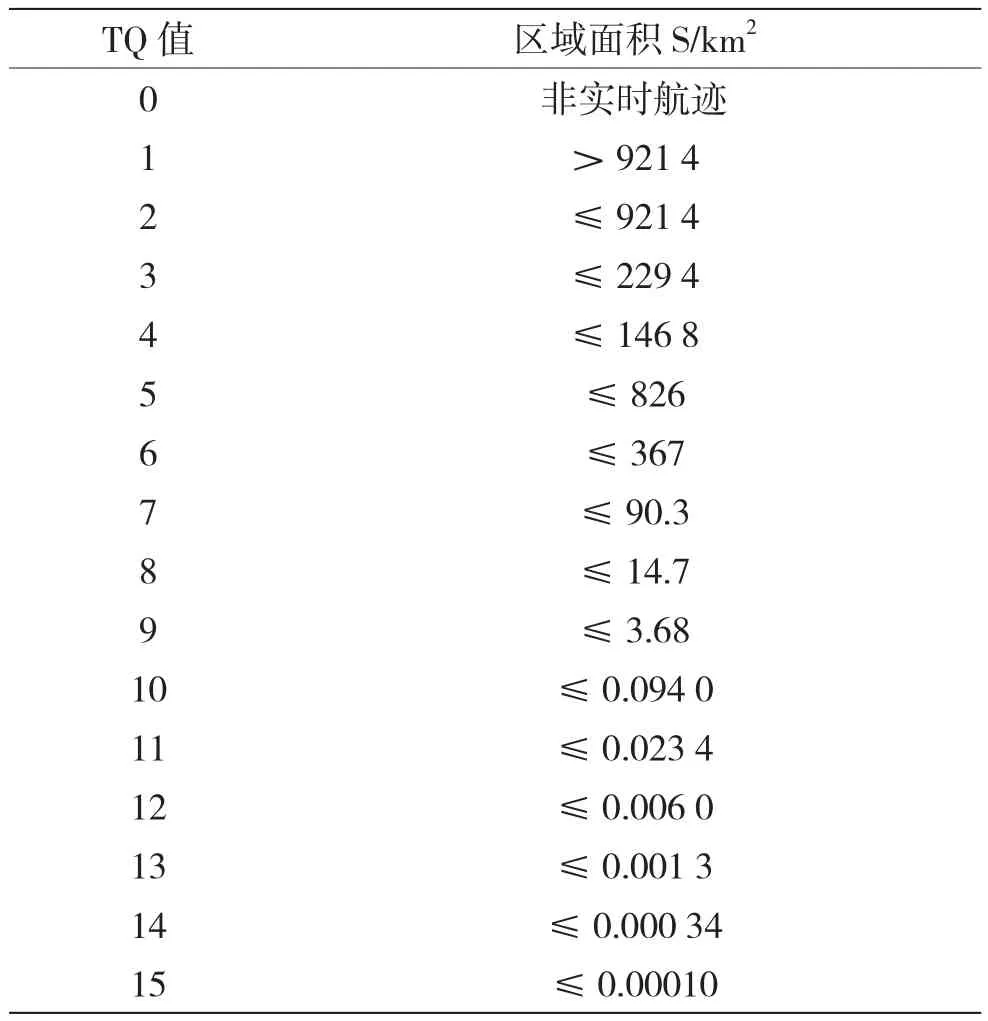
表1 航迹质量分级表
2.3节点抽取式
节点抽取式[10]是为了解决广播式的通信需求而产生的一种信息共享策略。主要思想:依据节点目标数据质量在系统网络内抽取一部分节点作为目标数据的提供方,其余节点均为数据的接收方,各节点仍然采用相同的融合算法用以实现整个系统内产生的目标航迹图像一致性。如图1所示,目标刚进入观测区,抽取出实线连接的四个点进行探测,目标移动到新位置后,重新选取虚线连接的四个点进行观测。移动后,观测节点这也是通过良好的报告来减少带宽需求的一种合理方法。相对广播模式,传输的数据量有一定的下降,且形成了全局统一的目标航迹图像,但随着节点数和目标数的增加,其通信需求仍然较大,实际系统中难以实现。
因此,在节点抽取策略的基础上进行拓展,提出了一种新的策略。主要思想:一个传感器联合一部分传感器节点合作跟踪一个目标。这是一个抽取方式,但是实际上只有检测节点的一部分发送一个报告,而非传播他们的AMRs给所有节点。协同节点只传播AMRs给其他联合节点,然后发送一个更新的子航迹(一个联合的AMRs的集合)给其他非联合节点。这种新策略也称之为联合(Coalition)[11]。
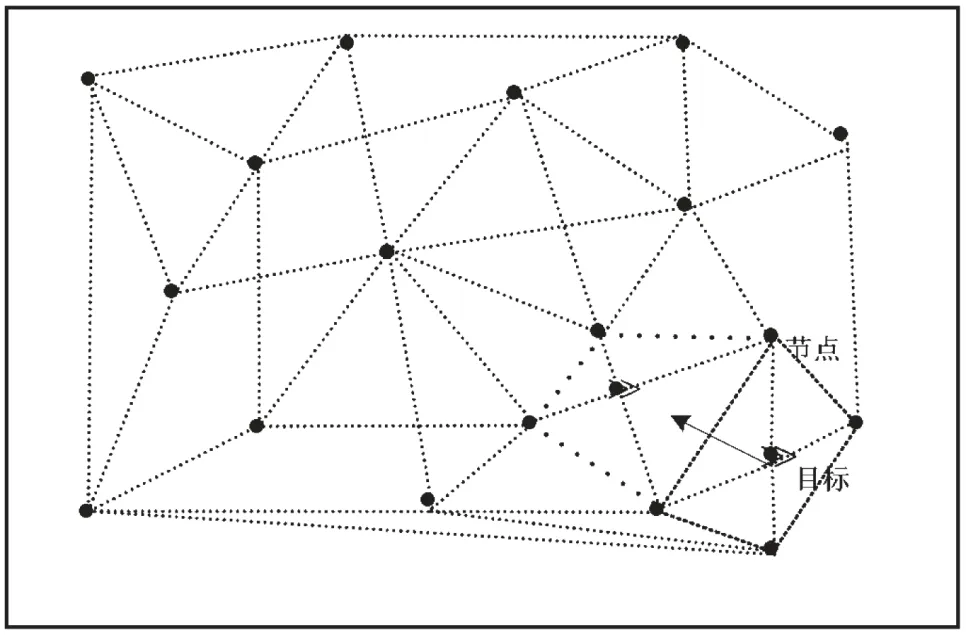
图1 节点抽取方式策略
因为非联合节点只有在联合节点更新后才能更新,所以联合方法没有实现每一个节点一个共同的战术图。再与抽取方法比较,联合节点抽取节点有一样的误差。但是,非联合节点得到的信息是延时的,延迟时间为收集联合AMRs到一个子航迹然后发送的时间。在这个方法中,需要最准确的数据节点(例如,武器系统),必须至少是联合的静默成员之一。
这里提到的传感器联合是一个非常短暂的组织。它的生存时间限制为一个飞机或者导弹穿过一个目标区域的时间。成员可能是动态的,因为作为一个移动目标,在不同位置的不同类型的传感器的遮蔽和反射率水平会产生变化。多主体系统研究已经提出将产生和最优化主体结构的协议,称之为联合编队。但是,因为严格的时间限制,需要谈判和一致性的协议不适合多传感器跟踪领域。
对协同节点选择的考虑不仅限于质量的高低和数量的多少,在一个极端情况下,能探测到目标的节点均为跟踪目标的联合成员。在另一个极端,可能只有一个节点跟踪目标和周期性更新剩下的节点。设置选入准则的目标是通过找到主要基于能提供独特目标信息的节点集合来达到一个平衡。准则允许一个非成员节点通过比较自身能力与设定的阈值来减少位置的不确定。如果通过这个标准,则加入联合,开始给联合节点传输AMRs。具体是否加入联合也取决于网络。例如,如果类似于多路广播式允许的情况,它能简单通过记录在联合节点发出的最后一个子航迹中的广播地址来加入联合节点。
跟踪准则是完全基于当前数据的,这个当前数据包括全局滤波的当前状态和最新的本地估计。以下提出的三个其他条款,可能提高联合成员的选择效率。但是,这三个条款的价值还需要在未来进一步做研究。准则将成为所有条款的加权和,权重值需要一个特定网络的一些试验和专家意见确定。
第一条准则,在任何时候,如果两个节点能提供相同信息,贡献处于增加状态的节点是首选节点。
第二条准则,因为目标反射率在不同的角度是不同的,考虑目标的当前和预测位置,传感器的地理位置将会被加入准则。直观地,我们将选择能从不同角度观测的节点的集合。其中,一个实现方式是德洛内三角算法(Delaunay Triangulation)[12]。
第三条准则,需要考虑当前联合成员的能力。例如,相位阵列传感器和旋转体有不同的范围和报告频率。甚至在相同类型的传感器中间,他们也能得出目标运动的不同假定,一个可能侦查到一个机动,或者在很短的时间内丢失一个航迹。
2.4基于马尔科夫决策的数据流控制方法
当前研究的一种利用马尔科夫决策机制进行数据流控制,可以有效通过控制平台间的信息流来减小通信链接中的冗余路径[13]。例如,当平台1数据已发送到平台2和平台3,而与平台1距离较远且与平台2距离较近的平台4也需要平台1的数据时,则不需要从平台1直接获取,而只需在平台2或平台3将平台1的数据进行转发即可,从而有效减少了冗余的链接路径。由于信息流的控制与协调只与本时刻各平台所处的状态有关,与历史状态无关,故可将其构造成无限阶段折扣马尔科夫决策过程(Markov Decision Process,MDP)模型,并采用动态规划理论和分布式数据查找方法相结合的方式进行处理。该策略不包括信息类型的选择,且只是针对冗余信息问题对通信链接路径进行动态优化。
3 通信需求分析
通信(AMR,Decimation,子航迹和联合)的带宽需求是分析计算获得的。为简单分析和阐明这个问题,我们假设所有节点任何时间均能看到所有航迹。但实际上因为地球的曲率,所有节点中只有部分节点在一个时间点能看到目标。分析中,假设有一个满足带宽需求的完美网络,同时也不考虑真实世界部署中系统传输安全性放在首要位置的军事系统的限制。基于此,分析中,AMR和子航迹带宽存在一个上界,基于AMR的抽取和联合节约的带宽也有一个上限值。
我们假设一个CCS目标,使用一个噪声为18 m/sec3/2的随机微分方程。如果m个节点以速率v(报告/每分钟)发送AMRs给其他所有节点,则时间T内广播方法的带宽需求为:

在一个AMR抽取方法中,每一个报告时间,m个节点中只有一个集合n将传输一个AMR给m-1个节点。发送的准则应该选择有最优质量的节点。它提供的信息比广播方法少,跟踪误差将会提高。如果抽取被仔细的完成,准确性的丢失将会被缩小。使用抽取方法带宽为:

注意带宽计算,联合方法带宽也是理想型的。如果报告与否的决定是基于目标评估值在每一个时刻都变化的准则,这样n会改变。为了便于比较,我们认为n为常数。
在子航迹方法中,m节点间的每一个周期(每t时间步骤)发送一个子航迹给其他节点。对一个机动目标,子航迹只要更少的信息,因为一个机动目标的速率在估计状态时基本没有价值。为了简化,限定相同的带宽在一个比一个CCS目标更高的速率发送机动目标的子航迹。这样使用子航迹带宽为:

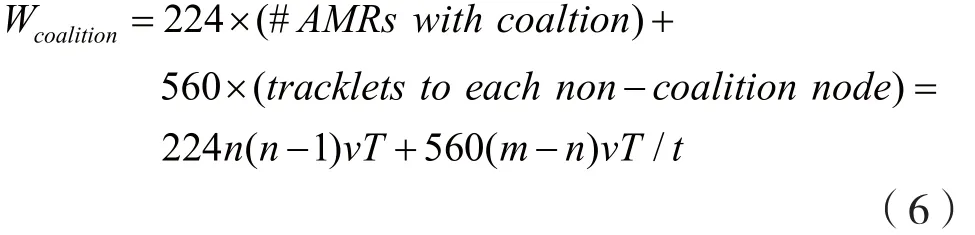
联合方法是抽取和子航迹的结合,节点中只有一部分决定发送AMR给其他联合节点,联合的一个节点周期内,发送子航迹给其他非联合节点。将假设条件简单化,机动目标的子航迹发送速率是CCS目标的2倍,且在相同带宽上。这样在一个时期T,如果每一个传感器产生量测在速率v(报告/每分钟),联合使用的带宽是:
几种通信管理策略以报告数为变量,所需通信速率情况如图2所示。从图2中可以看出,同为广播时,发送AMR信息格式所需速率远高于子航迹速率。当时子航迹信息有延时,所以应用模式不一样。由于广播方式始终是所有节点之间相互共享,所以一直保持最大通信速率需求。当其他两种策略的协同节点为系统全部节点时,三种策略的需求保持一致。而在抽取与联合之间,由于前者模式中,非协同节点也同样接收所有协同节点的量测数据,而对后者非联合节点间是子航迹的方式共享目标航迹数据,所以前者通信速率需求要明显高于后者。

图2 各种策略通信所需带宽比较
4 结 语
本文在简述分布式跟踪原理的基础上,重点对数据融合过程中的信息共享策略进行了系统整理,总结了几种分发策略如广播、抽取、联合、马尔科夫决策等的特点,并对不同的策略进行了优缺点的比较。同时,对他们的数据带宽要求进行简单比较分析,利用仿真图直观表明几种策略的通信需求。目前,实际应用在系统中的策略主要为广播式和报告责任式,其他几种策略还在测试研究中。在构建网络中心战作战体系过程中,“网络化”不仅意味着提供部队各组成部分之间的连通性,更关键的是实现完全分布式多平台之间全面的信息共享和灵活的行动协同,从而确保指挥员能够掌握所有相应的武器装备、全面的敌情等信息,以高效地实施精确交战、全维防护等作战行动。因此,对信息分发策略值得更进一步的研究,以提高系统作战效能。
[1] James Llinas,Christopher Bowman,Galina Rogova,et al.Revisiting the JDL Data Fusion Model II[C].Proc. of the 7th International Conference on Information Fusion,S tockholm,Sweden,2004:1218-1230.
[2] Kadar I,Blasch E,Yang C.Network and Service Management Effects on Distributed Net-centric Fusion Data Quality[C]. Proc. of the 11th International Conference on Information Fusion,Cologne,Germany,2008:1458-1465.
[3] Kadar I.Issues and Challenges in Distributed Sensor Fusion:Connection-resource Management Aspects[J]. Proceeding of the 7th International Conference on Information Fusion,Stockholm,Sweden,2004:56-65.
[4] Kadar I.Distributed Multisensor Fusion with Network Connection Management[J].Signal Processing Sensor Fusion Taget Recognition XIV. Proc. Of SPIE,2005(5809):86-92.
[5] 简小刚,贾鸿盛,石来德.多传感器信息融合技术的研究进展[J].中国工程机械学报,2009,7(02):227-232. JIAN Xiao-gang,JIA Hong-sheng,SHI Lai-de.Advances on Multi-sensor Information Fusion Technologies[J].Chinese Journal of Construction Machinery,2009,7(02):227-232.
[6] Bar-Shalom Y,Fortman T.E.Tracking and Data Association[M].Orlando.FL:Academic Press,1988.
[7] 杨永建,樊晓光,王晟达等.基于修正卡尔曼滤波的目标跟踪[J].系统工程与电子技术,2014,36(05):846-851. YANG Yong-jian,FAN Xiao-guang,WANG Sheng-da,Zet al.Target Tracking based on Amendatory Kalman Filter[J]. Systems Engineering and Electronics,2014,36(05):846-851.
[8] Martin E L,Hall D L,Jame Llinas.Handbook of Multisensor Data Fusion-Theory and Practice (Second Edition)[M]. Boston:Artech House,2008.
[9] 周春福,黄鹍.多数据链综合组网应用及其信息分发与处理[J].舰船电子工程,2010,30(07):11-13. ZHOU Chun-fu,HUANG Kun.Information Distribution and Processing in Comprehensive Application of Multi-data Link[J].Ship Electronic Engineering,2010,30(07):11-13.
[10] Barker W H,Nichols T S,Eck C R,et aL.A Tradeoff Analysis of Bandwidth Utilization Strategies in Distributed Sensor Networks[J].In Proceedings of National Fire Control Symposium,2001:24-31.
[11] Howard M,Payton D,Estkowski R.Coalitions for Distributed Sensor Fusion[J].In Proceeding of the Fifth International Conference,2002(01):636-642.
[12] Buneman P,Jajodia S.The Spanning Ratio of the Delaunay Triangulation is Greater Than π/2[C]// Canadian Conference on Computational Geometry,Vancouver,British Columbia,Canada,2009:165-167.
[13] Akselrod D,Sinha A,Kirubarajan T.Information Flow Control for Collaborative Distributed Data Fusion and Multisensory Multitarget Tracking[J].Man and Cybernetics–Part C:Application and Reviews,2012,4(42):501-517.

文 猛(1988—),男,硕士,工程师,主要研究方向为装备军事学;
刘 行(1991—),女,硕士,工程师,主要研究方向为无线通信;
李 牧(1990—),男,硕士,工程师,主要研究方向为无线网络传输与优化。
Information Sharing Strategy for Target Tracking
WEN Meng, LIU Xing, LI Mu
(PLA University of Science and Technology,Nanjing Jiangsu 210007,China)
Data fusion is the process for integating multiple data and knowledge representing the same realworld object as a consistent, accurate, and useful representation. Data fusion technology with high speed, low cost and high reliability is widely applied in the military field,and also has specially broad application prospects in the fields of automated manufacturing, business or even household. This paper focuses on data fusion process of information sharing strategies. Meanwhile several major distribution strategies are analyzed and compared, some problems existed in each strategy pointed out, and conclusions drawn that the distribution policy should depend on the actual application environment andreality needs. However there still exist several relatively large limitations in the present distribution strategies. Practical strategy research is also required.
data fusion; information sharing strategy; decimation;target tracking
TP3
A
1002-0802(2016)-08-01041-06
10.3969/j.issn.1002-0802.2016.08.016
2016-04-18;
2016-07-23
date:2016-04-18;Revised date:2016-07-23
猜你喜欢
机械工业标准化与质量(2022年6期)2022-08-12
纺织科学研究(2021年1期)2021-12-03
装备制造技术(2020年2期)2020-12-14
河南科技学院学报(自然科学版)(2020年2期)2020-05-22
电子制作(2019年22期)2020-01-14
青年歌声(2019年12期)2019-12-17
传媒评论(2019年5期)2019-08-30
时代英语·高一(2019年1期)2019-03-13
北京航空航天大学学报(2017年7期)2017-11-24
北京航空航天大学学报(2016年6期)2016-11-16
