永磁直线电动机的内模PID控制和抗干扰能力分析
2016-11-26 07:51:41刘炽义王子峣
微特电机 2016年8期
刘炽义, 赵 国, 王子峣
(东南大学,南京 210096)
永磁直线电动机的内模PID控制和抗干扰能力分析
刘炽义, 赵 国, 王子峣
(东南大学,南京 210096)
为了提高永磁直线电动机在运行过程中的稳定性和精确性,采用内模PID方法对永磁直线的运行过程进行优化控制。首先,采用内模PID和q轴电流相结合的方法,建立永磁直线电动机的控制模型;其次,在改变内模PID的控制参数情况下,分析永磁直线电动机的运行性能;最后,在各种类型干扰信号的情况下,研究内模PID控制在永磁直线电动机运行过程中的可靠性。理论分析和仿真计算结果表明,内模PID控制不仅有利于提高永磁直线电动机在运行过程中的稳定性和精确性,也能提高整个运动系统的抗干扰能力。
永磁直线电动机;内模PID;抗干扰能力;仿真
0 引 言
与传统的电励磁旋转电机相比,永磁直线电动机不仅采用了永磁体励磁的方式,而且在结构上与旋转电机有着明显的差别[1-2]。永磁体励磁方式和直线电动机的边端效应,使得永磁直线电动机与传统旋转电机的实质区别体现在电机内部的磁场变化上,而磁场的变化最终体现在永磁直线电动机的三相绕组电流上。因此,绕组电流控制技术是永磁直线电动机运行过程中优化控制的关键技术之一。传统的旋转电机优化控制技术在永磁直线电动机的应用效果有待详细的分析和检验,为了提高永磁直线电动机的运行稳定性和精确性,文献[3]采用神经网络PID控制的方法对永磁同步直线电动机进行优化控制;文献[4]采用H∞理论和迭代方法提高永磁直线电动机的运行性能和抗干扰能力。但是,上述两种控制方法均需要大量的数值计算时间,这对于控制系统运行的及时性是十分不利的。简单的PID控制方法虽然也能完成永磁直线电动机在运行过程中的优化控制,但该方法需要调整三个参数(比例、积分和微分)来实现控制系统的要求,这对控制系统的高效、及时和稳定运行是不够完美的。特别地,由于永磁直线电动机的边端磁场效应和永磁体尺寸结构等特点,必然导致永磁直线电动机在运行过程中受到一些干扰信号的影响(不同于旋转电机的干扰信号)。因此,永磁直线电动机控制系统的设计和应用必须紧密地结合其自身的特性,这是与传统的旋转电机控制系统最大的区别。
针对上述参考文献采用的控制方法不足之处,并根据永磁直线电动机自身的磁场分布(主要是边端磁场效应)和结构特点,本文采用内模PID法对永磁直线电动机进行了优化控制和抗干扰性能分析。理论分析和仿真计算结果表明,内模PID可以采用调整一个参数(滤波系数ε)的方式,实现永磁直线电动机的优化控制,这是传统PID控制方法无法比拟的优点之一。此外,在干扰信号的频率和幅值变化的情况下,内模PID控制还可以保障永磁直线电动机的稳定和精确运行。本文提出的内模PID控制方法不仅计算量小,而且其控制器的结构和控制过程简单,易于在永磁直线电动机的优化运行过程中使用。
1 控制模型
在输出功率和负载参数恒定的情况下,永磁直线电动机的运行速度与绕组电流有关[5]。结合永磁直线电动机的q轴电流,内模PID方法的具体优化控制过程如图1所示,通过控制永磁直线电动机的q轴电流数值,达到控制永磁直线电动机运行速度的目的,使输入信号(目标速度)与输出信号(输出速度)保持一致,从而最终实现永磁直线电动机运行速度的稳定性和精确性。整个控制系统的建模过程分为两个阶段,分别是永磁直线电动机的q轴电流解析表达和内模PID控制系统的设计。
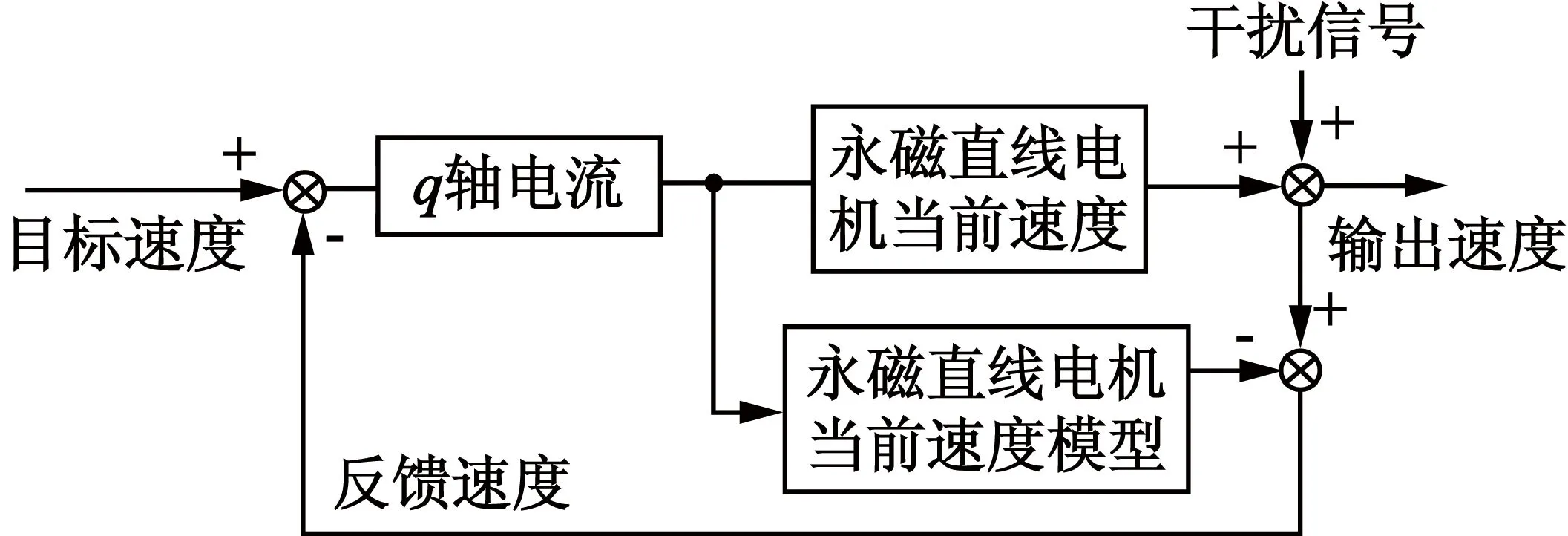
图1 永磁直线电动机的内模PID控制模型结构
1.1 永磁直线电动机的q轴电流
永磁直线电动机的q轴电流解析表达公式,来源于Park逆变换,如式(1)所示,是Park逆变换的通用式[6]:
(1)
式中:sd,sq,s0表示在dq0坐标变换情况下的电压、电流和磁链;sa,sb,sc是abc坐标变换情况下的电压、电流和磁链。
在abc坐标变换情况下,永磁直线电动机的运行功率可以表示:
P=UaIa+UbIb+UcIc
(2)
根据式(1)的Park逆变换,则永磁直线电动机在dq0坐标变换情况下的运行功率:
(3)
式中:Ud,Uq,U0是dq0坐标变换情况下的电压;Id,Iq,I0是dq0坐标变换情况下的电流。特别地,Park逆变换情况下的dq0坐标电压可以表示[7]
(4)
式中:R是电阻;L是电感;ω是角频率;ψ是磁链。
在Park逆变换和永磁直线电动机绕组△接法的情况下,由于abc坐标的三相矢量电压Ua,Ub,Uc的矢量和是零,以及dq0坐标变换情况下的零序电压U0也为零。所以,式(3)的进一步推导:
(5)
根据直线永磁电机的结构特点,其角频率ω与运行速度vl(也就是动子和定子之间的相对运行速度)的联系:
(6)
式中:τ是永磁直线电动机的极距:f是频率。
把式(6)带入式(5),可得:
(7)
假设永磁直线电动机的输出功率和负载参数恒定,则式(7)表明,可以通过改变永磁直线电动机q轴电流Iq,达到控制永磁直线电动机运行速度的目的。
1.2 内模PID控制系统设计
所谓内模控制(InternalModelControl),主要是由被控对象、控制器、输入信号和输出信号等组成的一个控制方法,该方法在上世纪八十年代由C.E.Garcia和M.Morari提出的。本文采用内模控制和PID控制相结合的方式,对永磁直线电动机的运行性能进行优化控制。

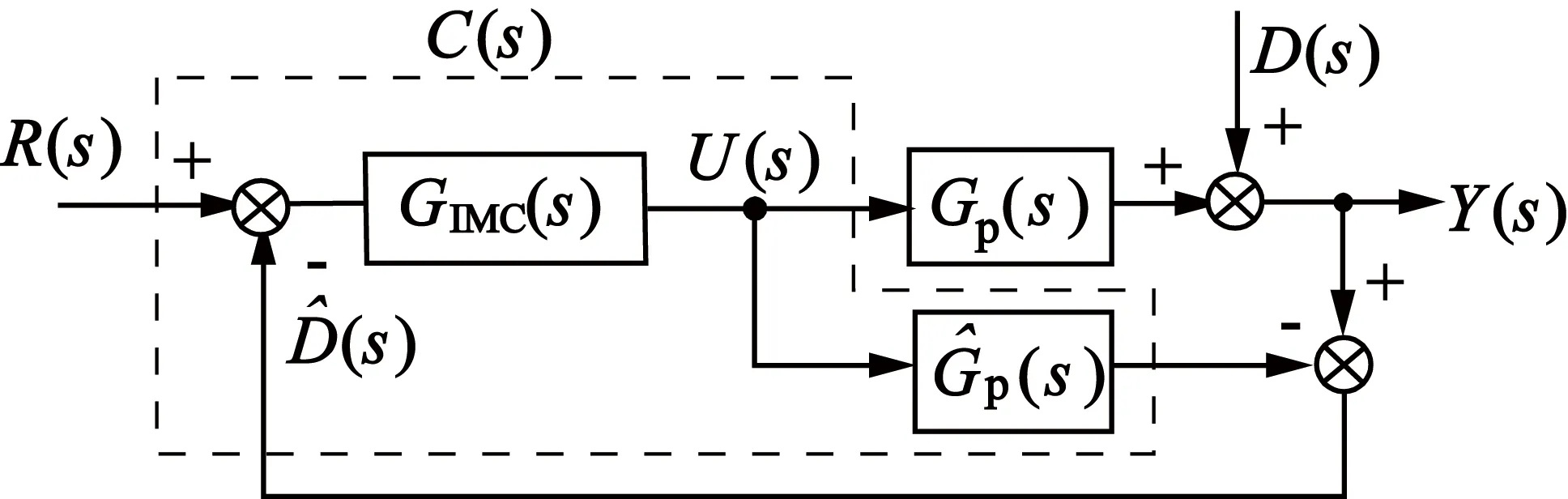
图2 内模PID控制器的结构
根据图2的输入、输出、反馈、被控对象和干扰信号等参数信息,可以推导出节点信号U(s):
(8)
输出Y(s)与被控对象Gp(s)和干扰信号D(s)的关系:
(9)
则根据式(8)和式(9),得到输出Y(s)和输入R(s)的表达式:
(10)
根据图2和式(10),反馈控制器C(s)可以描述:
(11)

(12)
(13)
(14)

(15)
这里,ε是滤波系数。由式(14)和式(15)可得式(11)的进一步表达式:
(16)

2 仿真实验和抗干扰性能分析
一般情况下,与永磁直线电动机的线性运动相比,其非线性运动更加复杂和难以控制。为了验证本文提出的内模PID控制方法在永磁直线电动机非线性运动情况下的可行性,采用MATLAB/Simulink仿真的方式,对内模PID控制下的永磁直线电动机运动性能进行分析和研究。图3是内模PID控制的仿真模型。图3中的非线性速度信号发生器由多个正弦信号(不同幅值和频率)叠加而成,永磁直线电动机q轴电流的二阶表达式为Gp(s)=1/[(2s+1)·(4s+1)]。

图3 内模PID控制的仿真模型
图4是滤波系数ε=1情况下的永磁直线电动机目标速度和输出速度。在ε=1情况下,目标速度和输出速度之间的余差(即目标速度和输出速度之间的差值)最大值是0.421,而且在相位上也存在滞后的现象,这表明在滤波系数ε=1情况下的内模PID控制方法欠佳。图5是滤波系数ε=0.1情况下的永磁直线电动机目标速度和输出速度。由此图可得,随着滤波系数ε的减小,目标速度和输出速度之间的余差大幅度地缩小(余差最大值是0.002),且二者之间的相位也达到了一致,这也就保证了永磁直线电动机在非干扰信号情况下运行的稳定性和精确性。

图4 ε=1的内模PID控制结果图5 ε=0.1的内模PID控制结果
为了检验内模PID控制方法的抗干扰能力,本文在仿真模型中添加了不同幅值和频率的正弦干扰信号。图6中干扰信号的幅值为1 m/s,周期为2 s;图7中,干扰信号的幅值为3 m/s,周期为5 s。分析图6和图7可得,在不同幅值和频率的正弦干扰信号情况下,内模PID的控制效果依然十分稳定。

图6 幅值1m/s,周期2s正弦干扰的内模控制图7 幅值3m/s,周期5s正弦干扰的内模控制
偏差,其余时间段内均保持良好的幅值和相位一致性。一般情况下,干扰信号均是由周期性信号和阶跃信号组成。上述仿真结果表明,内模PID控制方法可以提高永磁直线电动机在运行过程中的抗干扰能力。

图8 阶段干扰信号下的内模控制
3 结 语
本文首先通过建立模型,使内模PID控制和永磁直线电动机q轴电流结合起来,从而提出了采用内模PID控制方法优化永磁直线电动机的运行性能。真实的仿真计算和结果分析表明,滤波系数ε越小,内模PID控制方法的应用效果越好。并且,内模PID控制方法具有较好的抗干扰能力,从而进一步提高了永磁直线电动机在运行过程中的稳定性和精确性。采用内模PID控制方法,可以通过调整一个参数(滤波系数 )实现永磁直线电动机的最优化运行,这为永磁直线电动机的优化控制提供了一种有效和便捷的途径。
[1] 孙海涛,陈燕,段魏钊,等.一种永磁式开关磁阻直线电机的设计与有限元分析[J].微特电机,2016,41(3):14-21.
[2] 彭兵,刘铁法,张囡,等.凹型端齿削弱永磁直线电机端部力波动方法[J].电工技术学报,2015,30(7):119-124.
[3] 韩明文.永磁同步直线电机神经网络PID控制系统的研究[D].上海:华东理工大学,2013.
[4] 樊立萍,刘义.直线电机的H∞迭代学习控制设计[J].电力系统及其自动化学报,2009,21(2):87-91.
[5]WUF,ZHANGXP,JUP,etal.ModelingandcontrolofAWS-basedwaveenergyconversionsystemintegratedintopowergrid[J].IEEETransactionsonPowerSystems,2008,23(3):1196-1204.
[6]FITZGERALDAE,KINGSLEYCJr,UMANSSD.电机学(第六版)[M].刘新正,苏少平,高琳,等译.1版.北京:电子工业出版社,2004.
[7]BOLDEAI,NASARS.Linearelectricactuatorsandgenerators[M].Cambridge:CambridgeUniversityPress,1997.
[8] 赵辉.基于内模控制原理的PID控制器设计[D].天津:天津大学,2005.
Internal Model PID Control and Anti-Interference Ability Analysis of Permanent Magnet Linear Machine
LIUChi-yi,ZHAOGuo,WANGZi-yao
(Southeast University, Nanjing 210096,China)
Internal model PID method was proposed to optimal the operation process of permanent magnet linear machine and to improve its accuracy and stability. Firstly, a control model of permanent magnet linear machine was constructed with the combination of internal model PID andq-axis current. Secondly, the operational performance of permanent manger linear machine was analyzed based on the control parameter of internal model PID. Finally, considering the kinds of anti-interference signal, the operational reliability of permanent magnet linear machine was researched. The theory analysis and simulation results show that internal model PID is benefit to improve the accuracy and stability of permanent magnet linear machine, and the anti-interference ability of whole motion system is also improved.
permanent magnet linear machine; internal model PID; anti-interference ability; simulation
2016-04-18
TM351;TM359.4
A
1004-7018(2016)08-0086-03
刘炽义,男,本科,研究方向为自动控制技术、电机控制。
猜你喜欢
上海大中型电机(2021年2期)2021-07-21 03:01:32
电气技术(2021年3期)2021-03-26 02:46:08
防爆电机(2020年6期)2020-12-14 07:16:54
通信电源技术(2020年22期)2020-03-27 06:48:02
工业设计(2016年6期)2016-04-17 06:42:54
四川电力技术(2015年5期)2015-12-19 11:04:52
电测与仪表(2015年16期)2015-04-12 00:44:32
电测与仪表(2015年20期)2015-04-09 11:53:56
电测与仪表(2015年21期)2015-04-09 11:52:12
海军航空大学学报(2015年4期)2015-02-27 13:45:51