
Design and experimental performance verification of a thermal property test-bed for lunar drilling exploration
2016-11-24 02:26:28ZhngToZhoZengLiuShutingLiJinglinDingXilunYinShenWngGuoxinLiXioming
CHINESE JOURNAL OF AERONAUTICS 2016年5期
Zhng To,Zho Zeng,Liu Shuting,Li Jinglin,Ding Xilun,*,Yin Shen,Wng Guoxin,Li Xioming
aSchool of Mechanical Engineering and Automation,Beihang University,Beijing 100083,China
bChina Academy of Space Technology,Beijing 100094,China
Design and experimental performance verification of a thermal property test-bed for lunar drilling exploration
Zhang Taoa,Zhao Zengb,Liu Shutinga,Li Jinglina,Ding Xiluna,*,Yin Shenb,Wang Guoxinb,Lai Xiaomingb
aSchool of Mechanical Engineering and Automation,Beihang University,Beijing 100083,China
bChina Academy of Space Technology,Beijing 100094,China
Chinese Chang'e lunar exploration project aims to collect and return subsurface lunar soil samples at a minimum penetration depth of 2 m in 2017.However,in contrast to those on the Earth,automated drilling and sampling missions on the Moon raise the risk of burning bits.Test-beds are required for testing the thermal properties of drill tools in a lunar environment.In this paper,a novel temperature measuring method based on thermocouples and a slip ring was proposed.Furthermore,a data acquisition system for a drilling process was designed.A vacuous,cryogenic,and anhydrous soil environment simulating the lunar surface was established.A drilling test-bed that can reach a depth of 2.2 m was developed.A control strategy based on online monitoring signals was proposed to improve the drilling performance.Vacuum and non-vacuum experiments were performed to test the temperature rising effect on drill tools.When compared with the non-vacuum experiment,the vacuum temperature rise resulted in a 12°C increase.These experimental results provide significant support for Chinese lunar exploration missions.
1.Introduction
Our understanding of extraterrestrial regolith properties can be greatly enhanced by analyzing soil samples collected from celestial bodies.The method of drilling and sampling is the most direct approach to explore subsurface soil layers,and has been widely used to explore extraterrestrial soils for decades.1Automated drilling on the Moon and samples return missions were first accomplished in 1970 by the Soviet's robotic Lunar 16 lander.2In 1971,the Apollo Lunar Surface Drill(ALSD)was first deployed to extract soil column samples by American astronauts on Apollo 15.3,4The Sampler,Drill and Distribution System(SD2)was developed in 2001 by the European Space Agency(ESA)for a comet exploration mission named Rosetta.5–7The Curiosity rover was equipped with the Mars Science Laboratory(MSL)drill to collect Martian rocks and sand,and successfully landed on the Mars in 2012.8–10For the first mission of the ESA's Aurora Exploration Program,a 2-m long multi-auger drilling sampler will be employed to collect soil at a specified depth.11NASA's Mars2020 Sample Acquisition and Caching Technologies and Architectures,currently under development,will be used to acquire Mars rock samples in 2020.12,13For Chinese extraterrestrial exploration project,lots of drilling samplers have been proposed in recent years.14–17
Most planetary drilling will be performed blindly,i.e.,without any precursor seismic imaging of substrates typically used on the Earth when drilling for hydrocarbons.18On the Earth,geologic formation drilling is a mature technology;however,extraterrestrial drilling entails challenges that are significantly more complex.In the former Soviet Union's three lunar soil sampling and return missions,Luna-20 encountered a hard formation and rebooted three times during drilling to depths of 90,150,and 340 mm(drilling was abandoned at this depth).Similarly,Luna-24 was obstructed twice during drilling and coring.19To reduce therisk of mission failure,a number of tests should be performed to improve the safety and reliability of automated extraterrestrial drilling samplers.Test rigs and methods have been proposed and developed in recent years.However,each testing equipment and the corresponding test method are only applicable to specific tests.For example,the Lunar Vader was developed to test the drilling performance of water-saturated soils that may occur in lunar polar regions.20CRUX was designed to demonstrate the efficiencies in breaking through hard ice-soil layers.21MARTE was designed to verify remote command sequences for future Mars explorations.21,22DAME was developed for fully hands-off drilling,including fault dictation,recovery,and resumption of drilling.21,22A drilling and coring test-bed was developed to validate the flexible tube coring method,which may be used in Chinese Chang'e lunar exploration.23A drilling and sampling test-bed was designed to test various drilling and sampling parameters.24An on-line temperature-measuring system based on fiber Bragg grating sensors was employed to test the drill bit temperature against rocks in vacuum.25
The Moon has an atmosphere so tenuous as to be considered nearly a vacuum.The gas conduction effect does not exist in lunar soil,and the thermal conductivity of the soil is much lower than that on the Earth.26,27The temperature of the top 300-mm layer of the lunar regolith varies greatly with time in a lunar day.The maximum temperature difference of the surface nearly reaches 300°C.However,the temperature of the lower layer dose not fluctuate and is approximately-30°C at the lunar equator.28,29For Chinese Chang'e lunar exploration,a 2-m sample of subsurface lunar soil will be acquired with an automated drilling sampler.30The lunar exploration drill will work in extreme environments,i.e.,airless(without convection cooling),dry(without drilling muds or lubricants),blind(no prior local or regional seismic or other surveys),and weak(very downward force on the bit).1There is no effective way to dissipate the heat generated during the drilling process due to the poor thermal conductivity of lunar soil.Therefore,drilling in the lunar environment may lead to higher equipment temperatures,thereby greatly increasing the risk of burning the drill bit.The temperature performance of the drill bit must be confirmed by ground tests.
This paper aims to describe the design and experimental verification of a thermal property test-bed.Section 2 shows the test-bed scheme.Sections 3 and 4 discuss the designs of a lunar environment simulator and a drilling test-bed,respectively.A control system is introduced in Section 5.Section 6 presents experimental results.Finally,Section 7 summarizes the findings of this study.
2.Scheme of the test-bed
The thermal property test-bed was designed based on the drilling requirements of a simulated lunar environment and involves three components:the lunar environment simulator,the drilling test-bed,and the control system,as shown in Fig.1.The lunar environment simulator contains a vacuum chamber and a pump system(to simulate a lunar vacuum environment),a cooling and heating system(to control the environment temperature),and a specimen holder.The drilling test-bed was developed for testing drilling in a simulated lunar environment.The control system is divided into three subcontrollers,i.e.,the vacuum pump controller,the cooling and heating controller,and the drilling controller.Each subcontroller is individually controlled.
3.Lunar environment simulator
The thermal properties of a powder or granular material are highly dependent on ambient gas pressures.This is because a significant amount of heat within the powder is transferred by gaseous conduction within the inter-particle space.Only a relatively small amount of heat is transferred by conduction through soilparticles.31,32However,the approximately 10-10Pa pressure on the surface of the Moon is impossible to achieve on the Earth.26For pressures below 10 Pa,Bernett et al.,33Wechsler and Glaser,34,35Fountain and West,36and Tien and Nayak37showed that the thermal properties of a powdered material were independent of the ambient pressure.Therefore,to simulate the vacuum conditions of the Moon,thermal property measurements were conducted at pressures below this 10 Pa.
A general view of the lunar environment simulator design is presented in Fig.2.The simulator is comprised of a vacuum pump system,a vacuum chamber,a specimen holder(inside the chamber),and a cooling and heating system.Two vacuum gauges were used for the measurement of the pressure inside the chamber.
3.1.Vacuum pump system and vacuum chamber
The vacuum pump system is comprised of an oil diffusion pump(1.8X104L/s pumping speed at 6X100Pa),a roots pump(6X102L/s pumping speed at 5X102Pa),and three rotary-vane vacuum pumps(7X101L/s pumping speed at 1X105Pa).

Fig.1 Scheme of the thermal property test-bed.

Fig.2 Lunar environment simulator.
The vacuum chamber is comprised of three components as shown in Fig.3:the top component holds the drill tool,the middle component holds the specimen holder for drilling experiments,and the bottom pedestal component supports the chamber.The vacuum chamber is evacuated from the pedestal,which has been shown to be more efficient in reducing dust clouds when operating.
3.2.Specimen holder,cooling and heating system
The temperature on the Moon equator surface varies from-180 °C to 130 °C,while the soil temperature at a 300 mm depth is nearly constant at-30°C.A 7.5 kW refrigerating machine utilizing silicone oil as refrigerant has a minimum temperature of-55°C.A hermetically sealed copper cooling coil was interwoven on the outside of the specimen holder except the top 300 mm.Three 200 W iodine-tungsten lamps were mounted just above the specimen holder to heat the surface of soil samples up to a maximum temperature above 250°C.Details of the specimen holder are shown in Fig.4.
The diameter and depth of the specimen holder are 500 mm and 2050 mm,respectively.The holder was mounted above a slewing bearing that can rotate 120°.Therefore,there are at least three drilling positions,each separated by 60°.

Fig.3 Diagram of the vacuum chamber(perspective view).
To minimize errors due to heat conduction along temperature sensors,very thin(1 mm in diameter)platinum resistance thermometer elements(Pt100)were strung lengthwise through the specimen holder.To ensure the accuracy of the temperature field measurement,three temperature strings were placed in the simulated lunar soil.Each string consists of ten platinum resistors,at 200 mm intervals along the string.The first temperature string is located at the center of the specimen holder,the second string at a 150 mm radial distance from the center,and the third string at a 250 mm radial distance from the center(i.e.,on the inside wall of the specimen holder).
Holes of a considerable size were drilled on the side wall of the specimen holder to more readily evacuate gas molecules from the soil.Three layers of stainless steel mesh,40,600,and 800 mesh(from inside to outside),were used on the inside wall of the specimen holder to prevent leaking of lunar soil simulant.

Fig.4 Details of the specimen holder.

Fig.5 Schematic diagram of the drilling test-bed.
4.Drilling test-bed
A drilling test-bed scheme was designed based on test requirements.Fig.5(a)shows the mechanical system of the drilling test-bed,which is comprised of a rotary-percussive drilling mechanism,a penetrating mechanism,a magnetic fluid and met allic bellow sealing mechanism,a drill tool,and a slip ring.
The combination of a magnetic fluid and a met allic bellow sealing transmission(as shown in Fig.5(b))was used to ensure penetrating and rotary sealing performances.This sealing approach has great advantages because it separates the penetrating motion from the rotary motion.The magnetic fluid sealing element consists of an inner ring,an outer ring,and a magnetic fluid between the m.The outer ring was mounted to the vacuum chamber and the inner ring to the bottom end of the met allic bellow.The drill pipe was enveloped by the met allic bellow,which could be stretched over 2.6 m and compressed to less than 0.6 m.The top end of the met allic bellowwas mounted to and sealed with the drill pipe,while the bottom end was sealed with the inner ring of the magnetic fluid sealing element.During the drilling process,the top end penetrated and rotated with the drill pipe,but the bottom end only rotated with the drill pipe.Thus,the met allic bellow was compressed by the motion of the top end,and the penetrating motion was sealed.The rotary motion of the inner ring was sealed by the magnetic fluid inside the magnetic fluid sealing element.

Table 1 Signals monitored and variables of the drilling testbed.
As referenced in the drilling test-bed scheme,Table 1 shows the monitored signals and variables.The rotary-percussive drilling mechanism,the penetrating mechanism,and the drilling toll are introduced.
4.1.Rotary-percussive drilling mechanism
The rotary-percussive drilling mechanism is comprised of two independent actuators for the rotation of the auger and the drive of the percussive system.The use of two actuators enables three distinct drilling modes: rotary, rotarypercussive,and percussive.This flexibility is particularly advantageous when drilling in a variety of formations with different strengths.In softer formations,the rotary-only mode could be used to save energy.In harder formations,the rotary-percussive mode could be engaged for a lower weight on bit(WOB).38,39
Fig.6 shows the rotary-percussive mechanism of the drilling test-bed.The rotary motor provides rotary torque to the drill tool via a pair of spur gears and a spline.The percussive mechanism produces motion via a rocker bearing and an air cylinder.The rocker bearing driven by the percussive motor and the air cylinder pushes the percussive mass by compressing air inside the cylinder.The percussive frequency can be controlled by modulating the rotational speed of the percussive motor.The rotary and percussive torque signals are collected by the control system,and their motions can be terminated when a fault occurs.
4.1.1.Rotary mechanism
To test the adaptability and safety for drilling in extreme lunar rock environments,the rotary motor capability was extended to satisfy different drilling conditions.The 3 kW rotary motor uses a pair of gears(2:1)with a gearhead ratio of 5:1.For highspeed outputs,the motor drives the auger at a 200 r/min rated speed with a torque of 112.5 N.m.For high-torque outputs,the motor drives the auger at a 160 r/min rated speed with a torque of 179.0 N.m.A high-torque output is sufficient for drilling in lunar soil,lunar rock,or a mixed environment.The following equations are used to calculate the driving torque and rotary speed of the auger:

Fig.6 Scheme diagram of the rotary-percussive mechanism.

where Tdis the driving torque of the auger,Tris the rated torque of the rotary motor,isis the reduction ratio of the spur gears,iris the reduction ratio of the gearhead,nais the rated rotary speed of the auger,nrris the rated rotary speed of the rotary motor,and η is the efficiency of the gear drive.
4.1.2.Percussive mechanism
The percussive mechanism reduces the WOB and energy consumption.This is especially important in a low-g environment.40As shown in Fig.7,the percussive mechanism is comprised of the following components:a percussive motor,a rocker bearing,and an air cylinder.
The percussive motor directly drives the rocker bearing from 0 r/min to 3000 r/min with a percussive frequency varying from 0 Hz to 50 Hz.The air cylinder was pulled by a pendulum rod moving up and down.When the air inside the cylinder was compressed,the percussive mass impacted the top of the drill tool.The power of the percussive motor was 400 W.The air cylinder had a 50%efficiency;therefore,a maximum of 200 W could be delivered to the drill tool(the remaining 200 W was lost through friction and dissipated as heat).

Fig.7 Scheme diagram of the percussive mechanism.
4.2.Penetrating mechanism
As shown in Fig.8,the penetrating mechanism is comprised of a penetrating motor,a ball screw,four sliders,and two rolling guides.The ball screw was employed to advance and retract the drill bit in and out of the regolith surface.The test-bed enabled a penetration of at least 2 m to sample subsurface soil in a simulated lunar environment;therefore,the nominal stroke of the rolling guide was 2.2 m.The maximum penetrating force and speed are 2000 N and 500 mm/min,respectively.
The penetrating speed and maximum output torque of the penetrating mechanism are calculated as follows:

where vpis the actual penetrating speed,nrpis the rotational speed of the penetrating motor,p is the ball screw lead,ipis the reduction ratio of the gearhead,Tmaxis the maximum output torque of the ball screw,Tnis the nominal output torque of the penetrating motor,ηgis the efficiency of the planetary gearhead,and ηbis the efficiency of the ball screw.
4.3.Drill tool
The drill tool was tested inside the vacuum chamber,whereas the other components of the drilling test-bed were tested outside.As shown in Fig.9,a special drill tool construction was designed to transmit motion and sensor signals.The components of the drill tool include:(1)a slip ring-to pass electrical power or signals across a rotating interface(from sensors inside the drill tool to a data acquisition system);(2)a drill pipe-to transmit penetrating,rotary,and percussive motions and to seal the vacuum chamber(in combination with the magnetic fluid and met allic bellow sealing mechanism);(3)a seal joint-to separate vacuum and non-vacuum environments(the drill pipe is hollow to enable signal wires to pass through;the inside of the drill pipe is a non-vacuum environment and three aviation plugs are used to seal the end of the drill pipe);(4)an axial torsion load cell-to measure the penetrating force and rotary torque in the same cell;(5)a drill joint-to connect the auger and the axial torsion load cell;and(6)an auger-with a drill bit to penetrate up to a 2-m depth.

Fig.8 Scheme diagram of the penetrating mechanism.

Fig.9 Components of the drill tool.
The auger length is just over 2.5 m and the internal diameter of the coring pipe is 15.4 mm.Because the auger penetrates up to 2 m,the total volume of soil sampled is up to approximately 3.7X105mm3.The drill pipe is 3.245 m in length and is hollow to pass signal wires.
The distance between the auger and the coring pipe is only 1.75 mm.Special customized nickel chromium-nickel silicon thermocouples were adopted for measuring the temperature of the drill tool.The customized thermocouples have a 0.5 mm diameter and are adhered to the inside wall of the auger using a phosphoric acid-cuprous oxide inorganic adhesive.The maximum temperature resistance of this adhesive is 1000°C,which is sufficient for lunar drilling conditions.The sensors made continuous contact with the auger during drilling operation,and a continuous temperature distribution could be obtained.The coring pipe rotated with the auger during the drilling process.
To measure the temperature of the drilling bit,three fine1 mm holes were drilled to insert thermocouples.The intervals were filled with the adhesive for better heat transfer.Eight thermocouples were fixed at different positions to obtain a temperature distribution of the drill tool(as shown in Fig.10):Temp.1 is near the cutting edge of the bit and the maximum tool temperature likely occurs at this position;Temp.2 is to measure the temperature along the inside wall of the bit;Temp.3 is to measure the temperature along the contact surface of the auger and the bit;Temp.4 is to measure the temperature of the lowest point of the coring pipe;Temp.5 is to measure the temperature of the lowest point of the inside wall of the auger;Temp.6 is located 100 mm from Temp.5 to measure the temperature along the inside wall of the auger;Temp.7 is located 50 mm from Temp.6 to measure the temperature along the inside wall of the auger;and Temp.8 is located 50 mm from Temp.7 to measure the temperature along the inside wall of the auger.

Fig.10 Structure and temperature measuring positions of the drill tool.
5.Control system
The control system of the thermal property test-bed is divided into three subsystems:the vacuum pump control system,the cooling and heating control system,and the drilling control system.For convenience,each subsystem was designed to run independently.
5.1.Vacuum pump control system
The pump controller roughly follows the structure shown in Fig.11.The controller integrates a PLC for multiple arrangements of pumps and electromagnetic valves,an air compressor to drive valves,a forced air cooler to supply water coolant,and an interface for communication with a PC.A diffusion pump is combined with rotary-vane pump 3 and used for maintaining a high vacuum.Rotary-vane pump 2 serves as a backup for rotary-vane pump 1 to compensate for damages caused by soil dust at pump startup.During the rough vacuum phase,only the rotary-vane pumps were used,and valves 1,2,and 4 were opened.During the high vacuum phase,the rotary-vane pumps and the diffusion pump were engaged,and valves 1,3,and 4 were opened.The roots pump was employed during the transition between the rough and high vacuum phases;valves 1 and 2 were opened during the transition.The temperature of the coolant was maintained by the forced air cooler at 22°C,and the water flow rate for cooling the pumps was 70 L/min.The vacuum pump system specifications are shown in Table 2.

Fig.11 Vacuum pump control system.
5.2.Cooling and heating control system
Fig.12 shows the cooling and heating control system of the test-bed used to simulate the lunar temperature environments.The components of the controller include:a PLC - central control;a vacuum gauge and a vacuum head-for measuring the air pressure inside the chamber;three temperature strings-for measuring the soil temperature distribution;a temperature data logger-for acquiring temperature signals;three iodine-tungsten lamps-for heating the soil surface to simulate the lunar temperature at mid-day;a fluid reservoir for coolant storage;a circulator pump-to circulate the coolant in the closed copper coil;a heat exchanger-to transfer heat between the coolant and the refrigerator;a heating element-to raise the coolant to room temperature at the end of an experiment;a refrigerator-to transfer heat from inside the fridge to the external environment so that the insideof the fridge is cooled to a temperature below the ambient temperature of the room;and a forced air cooler-to cool the refrigerator.
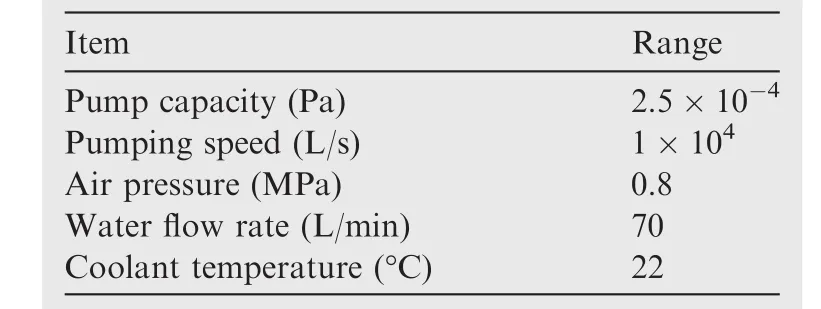
Table 2 Specifications of the vacuum pump system.
The specifications of the cooling and heating system are shown in Table 3.
5.3.Drilling control system
Fig.13 shows the drilling control system of the test-bed,which is mainly consisted of motors and sensors in the drilling testbed,a controller,a PC,and a power supply.The motors in the drilling test-bed include a penetrating motor,a percussive motor,and a rotary motor.The sensors in the test-bed include an axial-torsion load cell to measure the WOB and torque,a position switch,and thermocouples for measuring the drilling temperature.Corresponding motor drivers,a power source,an A/D converter,and a data logger are also included in the controller.The motion coordinator was programmed to control and monitor the corresponding motors during the drilling process.Force,displacement,temperature,and motor current signals were delivered to the PC and stored in Excel data files.The specifications of the drilling test-bed are shown in Table 4.

Table 3 Specifications of the cooling and heating system.

Fig.12 Cooling and heating control system.

Fig.13 Drilling control system.

Table 4 Specifications of the drilling test-bed.
6.Experimental study
A lunar soil simulant,supplied by the China Academy of Space Technology(CAST),was used as the drilling medium.Using safe drilling practices,a flexible drilling control algorithm was proposed based on adapting the penetrating force to the complex drilling medium.
6.1.Lunar soil simulant
The lunar soil simulant is a terrestrial material synthesized to approximate the chemical,mechanical,and engineering properties,and the mineralogy and particle size distribution of lunar regolith.41The primary ingredients of the soil are anorthosite,basalt,pyroxene,ilmenite,and volcanic glass.The lunar soil simulant was stored in closed containers,and the moisture content was maintained below 0.1%.The chemical and mineral compositions of the lunar soil simulant are shown in Table 5.
The particle sizes of the lunar soil simulant are shown in Table 6.The density of the loose lunar soil simulant is 1265 kg/m3.Previous studies indicated that packing density had a significant effect on the temperature properties of drill tools.42,43Thus,to simulate drilling in an extreme lunar regolith,a high packing density of 1910 kg/m3was used.The temperature strings were fixed inside the specimen holder prior to drilling.
To control the packing density of the lunar soil simulant,a certain amount of material was loaded in the specimen holderand vibrated for an hour with a 3-dimensional vibrator until no further height decrease of the material could be noted.This operation was repeated until the specimen holder was full of the lunar soil simulant.Fig.14 shows the lunar soil simulant prepared for the drilling experiments.

Table 5 Chemical and mineral compositions of the lunar soil simulant.

Table 6 Particle size range of lunar soil simulant.

Fig.14 Lunar soil simulant for drilling experiments.
6.2.Control principle
The torque and penetrating force are the most important signals in an autonomous drilling process.In most circumstances,rotary-only drilling is used in softer formations,and the percussive actuator is activated when encountering harder formations.The drilling algorithm was based on the drilling signals monitored by a real-time data acquisition(DAQ)system,as shown in Fig.15.A filter was designed to suppress noise in the signals.The drilling WOB Fi,the motor current Ciand torque Ti,the penetrating speed vpi,the rotary speed nri,and the percussive frequency fiwere stored in an on-line database.
For the WOB routine,the penetrating force was fed into the drilling algorithm.Ten data points per second,Fi,Fi-1,...,Fi-9,of the penetrating force were acquired,and a running average Faverof the 10 most recent data points was calculated to reflect variations in the drilling formation.When Faverwas greater than the expected 250 N,the drilling strategy would stop the penetrating actuator for 10 s to maintain the WOB below a safe value.The motor torque Ti(a running average Taver)and current Ci(a running average Caver)were also fed into the control strategy for similar protection strategies.
6.3.Experiment and result analysis
The drilling parameters in a preliminary experiment were as follows:a rotary speed of nr=120 r/min and a penetrating speed of vp=130 mm/min.These drilling parameters were optimized in an earlier study by CAST.The preliminary experiment studied the differences between temperature rises in vacuum and non-vacuum environments,and thus the lunar soil simulant was not cooled or heated.
When the lunar soil simulant was not placed inside the vacuum chamber,55 min were required to achieve 9.5X10-2Pa(vacuum gauge 2)and 1.7X10-1Pa(vacuum gauge 1)pressures,as shown in Fig.16.The pressures in vacuum gauges 1 and 2 were nearly the same as before,i.e.,2X10-1Pa.An obvious change was observed when a new pump was started.
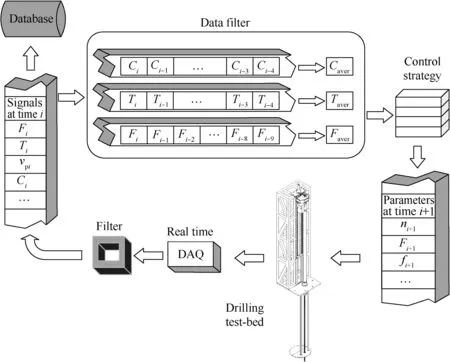
Fig.15 Process of the autonomous drilling control.

Fig.16 Pressure curve inside the vacuum chamber without the soil simulant.
6.3.1.Non-vacuum experiment
A 2000.92 mm depth was reached in 16.45 min.Fig.17 shows the mechanical data during the experiment.The sampling frequency was 10 Hz,which reflected an accurate force variation during the entire drilling process.
Fig.18 shows the temperature data of the drill tool in the non-vacuum experiment.The initial temperature was approximately 25 °C,and the bit temperature(Temps.1–3)rapidly increased to 33°C within two min.During the entire process,the temperature difference between the bit and the auger was below 5°C except for certain peak points.The coring pipe temperature(Temp.4)and the auger temperature(Temps.5–8)changed with the bit temperature(Temps.1–3)and always lagged behind.This trend followed the heat transfer trend.In this experiment,the maximum temperature was 45°C as observed for Temp.1.

Fig.17 WOB and torque of the drill tool in the non-vacuum experiment.

Fig.18 Temperatures of the drill tool in the non-vacuum experiment.
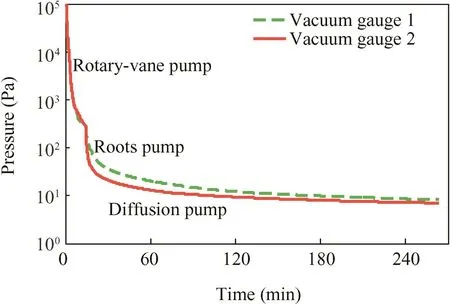
Fig.19 Pressure curve inside the vacuum chamber with the soil stimulant.
6.3.2.Vacuum experiment
The chamber was evacuated to 8 Pa in approximately 4.5 h(vacuum gauge 1),as shown in Fig.19.The atmosphere was always maintained below 9 Pa during the drilling process.In this experiment,a turning point was not observed when the diffusion pump was started.
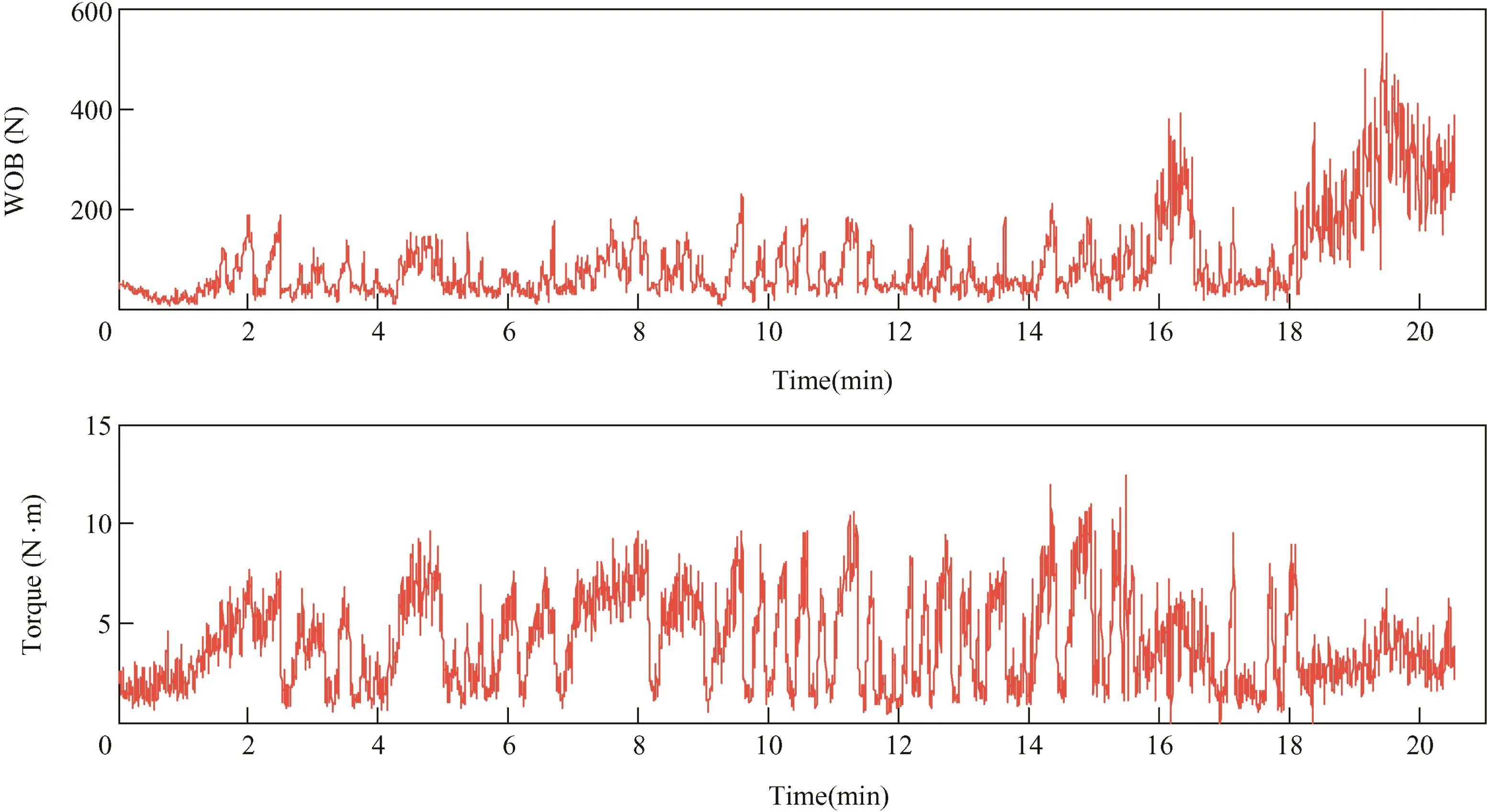
Fig.20 WOB and torque of the drill tool in the vacuum experiment.

Fig.21 Temperatures of the drill tool in the vacuum experiment.
Fig.20 shows the mechanical data series of the drill tool in the vacuum experiment.In the non-vacuum experiment,a 2000.92-mm depth was reached within 16.45 min,and the average penetrating speed was121.64 mm/min.However,a 1857.12 mm depth took 20.55 min to reach,and the average penetrating speed decreased to 90.37 mm/min in this vacuum experiment.According to the control principle,when the WOB was greater than the expected 250 N,the drilling controller would stop the penetrating actuator for 10 s to maintain the WOB below the safe value.When compared with the nonvacuum experiment,more time was taken to reach the final depth in this experiment because the WOB was higher in the final 4 min,necessitating more frequent stops of the penetrating motor.
Fig.21 shows the thermal data of the drill tool in the vacuum experiment.The initial temperature was approximately 24 °C.However,the temperature of the bit(Temps.1–3)increased to 45°C within two min.The coring pipe temperature(Temp.4)increased slowly with depth during the entire drilling process.In the final 5 min,the WOB increased due to the presence of hard formations(likely a rock inclusion),and hence,the specific energy increased.This increased the heat input from the drilling process,which could not be efficiently dissipated by the lunar soil simulant.During the drilling experiments,the maximum temperature was 136°C for Temp.1.In the vacuum experiment,when compared with the non-vacuum environment results,the average temperature of the drilling bit was approximately 12°C higher regardless of the presence of a hard formation.
7.Conclusions
(1)To verify the thermal properties of drill tools for lunar exploration,this paper proposed a thermal property test-bed.The test-bed is consisted of a lunar environment simulator for the vacuous,cryogenic,and anhydrous Moon surface environment,and a drilling test-bed for penetrating at least 2 m in a simulated lunar environment.
(2)A method for simulating the lunar environment was proposed.A vacuum chamber and pump system was designed to achieve a near-vacuum environment,iodine-tungsten lamps were employed to heat the soil surface to 250°C,a refrigerating machine utilized silicone oil to cool the soil to-40°C,and temperature strings were embedded into the lunar soil simulant to measure the soil temperature online.
(3)A new drilling testing method was proposed.In this method,a drill pipe was designed to transmit penetrating,rotary,and percussive motions,as well as to seal the vacuum chamber(when combined with a met allic bellow and a magnetic fluid).The penetrating and rotary motions are sealed by the met allic bellow and the magnetic fluid,respectively.A control strategy based on the online monitoring signals was employed to enhance the performance of the drill.
(4)A novel temperature measuring method for drill tools was proposed.The proposed temperature measuring system used thermocouples integrated with the bit or on the inside auger wall.The thermocouples were positioned as close as possible to the cutting edge or in other positions to measure the temperature of the drill tool.To collect and transmit data,aviation plugs,a slip ring,and a temperature data logger were incorporated into the test-bed.
(5)Preliminary experiments results showed that the temperature of the drill tool was influenced by the WOB.In a vacuum experiment,the average temperature of the drilling bit was approximately 12°C greater than that in a non-vacuum environment regardless of the presence of a hard formation.Vacuum must be considered as one of the important factors in the drilling process on the lunar surface.
Acknowledgments
The research was supported by the China Academy of Space Technology(CAST).The authors would like to thank CAST for their help and kind cooperation on the system designs and tests.
1.Bar-Cohen Y,Zacny K.Drilling in extreme environments:penetration and sampling on earth and other planets.1st ed.Hoboken:John Wileyamp;Sons;2009.p.347–55.
2.Zarya info[Internet].Moscow:Robert Christy FBIS;c2000.Available from:lt;http://www.zarya.info/Diaries/Luna/Luna16.phpgt;[updated 2013 July;cited 2015 November 8].
3.Allton JH.Catalog of Apollo lunar surface geological sampling tools and containers.Houston:Lockheed Engineering and Sciences Company,NASA/JSC Solar System Exploration Division.Report no:JSC-23454;1989.
4.Airandspace.si.edu[Internet].Washington:The Smithsonian's National Air and Space Museum;c1976-01.Availablefrom:lt;http://airandspace.si.edu/collections/artifact.cfm?ob
ject=nasm_A19761095000gt;[updated 1976 October 9;cited 2015 November 8].
5.Dainese C,Finzi AE.SD2–a cometary soil drill and sampler device.Aerotec Missili Spaz 2001;85:174–80.
6.Dainese C,Finzi AE,Malnati F.Test facility for SD2 comet sampler performance improvement.In:Proc 9th ESA workshop on advanced space technologies for robotics and automation'ASTRA;2006 Nov 28–30;Noordwijk,Netherlands.Noordwijk:ESA;2006.p.1–8.
7.Finzi AE,Zazzera FB,Dainese C,Malnati F,Magnani PG,Re E,et al.SD2 – how to sample a comet.Space Sci Rev 2007;128(1–4):281–99.
8.Okon A.Mars science laboratory drill.In:Boesiger Edward A,editor.Proceedings of the 40th aerospace mechanisms symposium.2010 May 12–14;Florida,USA.Washington,D.C.:NASA;2010.p.1–16.
9.Jandura L.Mars science laboratory sample acquisition,sample processing and handling:subsystem design and test challenges.In:Boesiger Edward A,editor.Proceedings of the 40th aerospace mechanisms symposium.2010 May 12–14;Florida,USA.Washington,D.C.:NASA;2010.p.233–48.
10.Anderson RC,Jandura L,Okon A,Sunshine D,Roumeliotis C,Beegle LW,et al.Collecting samples in Gale Crater,Mars;an overview of the Mars Science Laboratory sample acquisition,sample processing and handling system.Space Sci Rev 2012;170(1–4):57–75.
11.Winnendael MV,Baglioni P,Vago J.Development of the ESA ExoMars rover.In:Proceeding of the 8th international symposium on artificial intelligence;2005 September 5–8;Munich,Germany.Munich:ESA;2005.p.1–8.
12.Zacny K,Chu P,Davis K,Paulsen G,Craft J.Mars2020 sample
acquisition and caching technologies and architectures.In:2014 IEEE aerospace conference;2014 March 1–8;Big Sky,USA.New York:IEEE;2014.p.1–12.
13.Zacny K,Chu P,Paulsen G,Spring J,Hedlund M,Mellerowicz B.Sample acquisition and caching architectures for the Mars 2020 Rover Mission,AIAA space 2013 conferenceamp;exposition;2013 September 10–12;San Diego,USA.Reston:AIAA;2013.p.1–13.
14.Ding XL,Li KJ,Yin ZW.Multi-rod deep driller for lunar subsurface sampling.J Astronaut 2009;30(3):1189–94[Chinese].
15.Li JL,Ding XL,Zhang WM,Chu CC,Wang K.Design of a multi-function minor planet soil sampler.J Mech Eng 2015;51(13):167–75[Chinese].
16.Pang Y,Liu ZQ,Li XL.Design and analysis of automatic drilling sampling mechanism for lunar exploration.Chin Space Sci Technol 2012;32(6):16–22[Chinese].
17.An YH.The design and analysis of sampler for lunar subsurface regolith[dissertation].Beijing:Beihang University;2013[Chinese].
18.Glass BJ,Thompson S,Paulsen G.Robotic planetary drill tests.NASA[Internet];2011 October.p.1–7.Available from:lt;http://ntrs.nasa.gov/archive/nasa/casi.ntrs.nasa.gov/20110004875.pdfgt;[cited 2015 November 8].
19.Yan TN,Ran HQ,Duan XS.Universe exploration and drilling technique.Explor Eng:Rock Soil Drill Tunnel 2010;37(1):3–7[Chinese].
20.Zacny K,Paulsen G,Szczesiak M,Craft J,Chu P,McKay C,et al.LunarVader:development and testing of lunar drill in vacuum chamber and in lunar analog site of Antarctica.J Aerospace Eng 2012;26(1):74–86.
21.Glass B,Cannon H,Branson M,Hanagud S,Paulsen G.DAME:planetary-prototype drilling automation.Astrobiology 2008;8(3):653–64.
22.Zacny K,Paulsen G,Davis K,Mumm E,Gorevan S.Honeybee robotics planetary drill systems.In:Proceedings of the 39th lunar and planetary science conference.2008 March 10–14;League City,USA.Houston:LPI;2008.p.1355–6.
23.Shi XM,Quan QQ,Tang DW,Jiang SY,Hou XY,Deng ZQ.Development of a drilling and coring test-bed for lunar subsurface exploration and preliminary experimental research.Chin J Mech Eng 2013;26(6):1–10.
24.Wang QC.Development and experimental study of drilling and sampling test-bed[dissertation].Harbin:Harbin Institute of Technology;2012[Chinese].
25.Cui JS,Hou XY,Zhao DM,Hou YS,Quan QQ,Wu X.Thermal simulation and experiment of lunar drill bit in vacuum.TELKOMNIKA Indonesian J Electr Eng 2014;12(6):4756–63.
26.Heiken G,Vaniman D,French BM.Lunar sourcebook:a user's guide to the Moon.1st ed.Cambridge:CUP Archive;1991.p.40–5.
27.Cremers CJ,Birkebak RC.Thermal conductivity of fines from Apollo 12.In:Proceedings of the second lunar Science conference;1971 January 11–13;Huston,USA.Cambridge:The MIT Press;1971.p.2311–5.
28.Vasavada AR,Paige DA,Wood SE.Near-surface temperatures on Mercury and the Moon and the stability of polar ice deposits.Icarus 1999;141(2):179–93.
29.Vasavada AR,Bandfield JL,Greenhagen BT,Hayne PO,Siegler JP,Williams JP,et al.Lunar equatorial surface temperatures and regolith properties from the Diviner Lunar Radiometer Experiment.J Geophys Res 2012;117(E12):1–12.
30.Ouyang ZY.Introduction to lunar science.1st ed.Beijing:China Astronautic Publishing House;2005,p.304–17.[Chinese].
31.Cremers CJ.Density,pressure,and temperature effects on heat transfer in Apollo 11 fines.Proceedings of the AIAA 6th thermophysics conference; 1971 April 2–6; Tullahoma,USA.Reston:AIAA;1971.p.2180–3.
32.Cremers CJ.Thermophysical properties of Apollo 14 fines.J Geophys Res 1975;80(32):4466–70.
33.Bernett EC,Jaffe LD,Martens HE,Wood HL.Thermal properties of a simulated lunar material in air and in vacuum.AIAA J 1963;1(6):1402–7.
34.Wechsler AE,Glaser PE.Thermal conductivity of nonmetallic materials summary report.Report no:NAS 8-1567.Lexington:University of Kentucky;1964.
35.Wechsler AE,Glaser PE.Pressure effects on postulated lunar materials.Icarus 1965;4(4):335–52.
36.Fountain JA,West EA.Thermal conductivity of particulate basalt as a function of density in simulated lunar and Martian environments.J Geophys Res 1970;75(20):4063–9.
37.Tien CL,Nayak AL.Analytical models for lunar soil thermal conductivity.In:AIAA tenth thermophysics conference;1975 May 27–29;Denver,USA.Reston:AIAA;1975.p.1–8.
38.Mukherjee S,Bartlett P,Glass B,Guerrero J,Stanley S.Technologies for exploring the Martian subsurface.In:2006 IEEE aerospace conference;2006 March 4–11;Big Sky,USA.New York:IEEE;2006.p.1–11.
39.Guerrero J,Craig J,Meyers M,Reiter J,Wang G,Wu D.Planetary drill technology and applications to future space missions.In:Proceeding of space resources roundtable VII:LEAG conference on lunar exploration lunar and planetary institute;2005;Houston,USA.Huston;2005.p.1–10.
40.Zacny K,Bar-Cohen Y,Brennan M,Briggs G,Cooper G,Davis K,et al.Drilling systems for extraterrestrial subsurface exploration.Astrobiology 2008;8(3):665–706.
41.Zheng YC,Wang SJ,Feng JM,Ouyang ZY,Liu JZ,Liu CR.CAS-1 lunar soil simulant.Acta Min Sinica 2007;27(3):571–8[Chinese].
42.Cui JS,Hou XY,Zhao DM,Hou YS,Quan QQ,Xiang W,et al.Experimental research on temperature rise of bit in drilling normal and low temperature lunar soil simulant.Appl Mech Mater 2013;373–375:2008–14.
43.Cui JS,Hou XY,Jiang SY,Pan WJ,Ding TX.Research on temperature rise of cutting edge in drilling lunar soil simulant with sensors.Sensor Lett 2015;13(2):156–60.
Zhang Taois a Ph.D.student in the School of Mechanical Engineering and Automation at Beihang University.He received his B.S.degree in Aircraft Manufacturing Engineering from Beihang University in 2008.His research interests include extraterrestrial planet unmanned sampling.
9 November 2015;revised 28 December 2015;accepted 20 January 2016
Available online 26 August 2016
Drilling test bed;
Lunar drill;
Lunar environment simulator;
Temperature measurement;
Thermal property
©2016 Production and hosting by Elsevier Ltd.on behalf of Chinese Society of Aeronautics and Astronautics.This is an open access article under the CC BY-NC-ND license(http://creativecommons.org/licenses/by-nc-nd/4.0/).
*Corresponding author.
E-mail addresses:buaazt@gmail.com(T.Zhang),xlding@buaa.edu.cn(X.Ding).
Peer review under responsibility of Editorial Committee of CJA.
 CHINESE JOURNAL OF AERONAUTICS2016年5期
CHINESE JOURNAL OF AERONAUTICS2016年5期
- CHINESE JOURNAL OF AERONAUTICS的其它文章
- Dependence of creep age formability on initial temper of an Al-Zn-Mg-Cu alloy
- Plastic deformation analysis and forming quality prediction of tube NC bending
- Tool wear during high speed turning in situ TiCp/TiBwhybrid reinforced Ti-6Al-4V matrix composite
- Comparative investigation on high-speed grinding of TiCp/Ti–6Al–4V particulate reinforced titanium matrix composites with single-layer electroplated and brazed CBN wheels
- High-cycle fatigue behavior of Co-based superalloy 9CrCo at elevated temperatures
- Multi-state autonomous drilling for lunar exploration