
轮毂式永磁直流测功机系统的研究
2016-11-23 08:14张铁民黄鹏焕黄沛盛
振动、测试与诊断 2016年5期
张铁民, 黄鹏焕, 黄沛盛, 黄 翰, 梁 莉
(华南农业大学工程学院/国家生猪种业工程技术研究中心 广州,510642)
轮毂式永磁直流测功机系统的研究
张铁民, 黄鹏焕, 黄沛盛, 黄 翰, 梁 莉
(华南农业大学工程学院/国家生猪种业工程技术研究中心 广州,510642)
轮毂电机性能好坏直接影响电动车性能,因此有必要对轮毂电机动态特性进行测试。笔者通过分析永磁直流测功机系统的工作原理,设计了框架式测功机结构,采用双万向联轴器联接发电机输出轴、转矩转速传感器和被测电机的输入轴,并通过一对外啮合齿轮副建立了发电机与被测电机的机械传输链。设计了基于脉宽调制信号的直流测功机系统加载电路,采用等效的模拟负载代替真实负载,构建了轮毂式永磁直流测功机系统。实验结果表明,该轮毂式直流测功机系统结构简单、控制容易、使用方便,满足了中小功率轮毂电机的动态特性测试的需要。
模拟负载; 测功机; 轮毂电机; 脉宽调制
引 言
轮毂电机在电动车等领域得到广泛应用,轮毂电机性能好坏直接影响电动车的性能。为更有效地发挥轮毂电机的优越性能,有必要建立轮毂式永磁直流测功机系统,实现对永磁无刷直流轮毂电机及相应控制器的动、静态性能测试。文献[1]将虚拟仪器技术应用在直流无刷轮毂电机试验台架上,设计了测控系统电路,并对电机再生制动实验进行了研究,但采用的磁粉测功机发热影响到测量精度。文献[2]针对电动汽车用轮毂电机设计了一套动力总成试验台架的硬件及软件平台,并通过平台对轮毂电机和整车控制策略进行了实验,但其测试对象局限于电动汽车轮毂电机。文献[3]设计了基于数据采集卡的车用驱动电机台架,通过台架实现对电压、电流、转速和转矩的测量和记录。文献[4]在基于PROFIBUS现场总线的通讯网络的基础上设计了电动汽车电机试验台系统,由于采用了现场总线技术,对通信速度提出了较高要求。文献[5]搭建了以电动汽车用轮毂电机为主体的直流无刷电机再生制动系统试验台,并通过Simulink软件建立了以回收能量最大化为目标的再生制动控制模型。
笔者根据畜禽养殖及设施农业作业的使用需求,设计并构建了适用中小型功率轮毂电机的永磁直流测功机系统,通过实验验证该系统的可靠性及稳定性。
1 永磁直流测功机原理
永磁有刷直流电机具有调节负载简单以及负载特性好等特点,既可以作为电动机拖动被测电机,也可以作为发电机加载,转速调节范围大,在额定转速以下能进行恒转矩加载,节能环保。当作为发电机时,测功机主机不消耗加载能量,能量可以消耗在测功机负载电阻上,不需要其他介质对其进行冷却,或者将能量回馈到电网中。考虑本系统的被测电机功率多在2 kW以下,采用负载电阻消耗能量,这样使得系统控制与机械结构简单,具有良好的机械特性和调节控制特性。
测功机主机采用永磁有刷直流电机,以对被测电机进行不同工况的负载模拟和输出的能量进行吸收,从而可以测试被测电机在不同工况下的性能参数[6-7]。该永磁有刷直流电机将被测电机传递的机械能转化为电能,通过测量制动机械支座上的反作用力矩,得到作用在测功机旋转主轴上的输入转矩即被测电机的输出转矩[8]。
永磁有刷直流电机功率、转矩与转速关系为
P=Tn/9 550
(1)
其中:T为转矩;n为转速;P为功率。
由式(1)可知,可通过测量转矩和转速大小求得被测电机的功率。
永磁有刷直流电机电刷之间的感应电动势为
(2)
其中:E为电机电刷之间的感应电动势;Ce为电势常数,它是与电机结构有关的函数;φ为主磁通量;n为转子转速。
当永磁有刷直流电机作发电机运行时,电磁转矩为制动转矩,动力学方程为
T1=T+T0+Jdw(t)/dt
(3)
当永磁有刷直流电机作电动机运行时,电磁转矩为驱动转矩,动力学方程为
T=T1+T0+Jdw(t)/dt
(4)
其中:T1为被测电机转矩;T为永磁有刷直流电机的电磁转矩;T0为空载转矩;J为转子与负载的等效转动惯量;w(t)为机械角速度。
由于T0较小,通常可忽略不计,永磁有刷直流电机的转矩平衡方程为
T-T1=Jdw(t)/dt
(5)
由式(5)知,当电机转速达到稳态时,T=T1,电磁转矩T由转矩转速传感器测到。
2 永磁直流测功机系统
永磁直流测功机系统由机械系统、电气系统和被测电机3部分组成,如图1所示。

图1 直流测功机系统框图Fig.1 System diagram of DC dynamometer
测功机采用框架式机械结构,被测电机通过一对外啮合直齿轮与发电机的输出轴联接,为避免转矩转速传感器与发电机输出轴及被测电机的输入轴轴心不对中,采用二个万向节联轴器联接发电机输出轴、转矩转速传感器和被测电机的输入轴,并在外啮合齿轮副上安装防护罩,如图2所示。

图2 直流测功机系统结构实物图Fig.2 DC dynamometer system structure
测功机电气系统包括永磁有刷直流电机、转速转矩传感器、负载电阻、控制电路、信号发生器、开关电源和显示仪表等。
永磁有刷直流电机作为加载电机,其定子包括产生励磁磁场的主磁极、具有固定主磁极功能并兼作磁路的机座、电刷装置以及改善换向的换向极,定子通过机械机构支撑电机并产生励磁磁场。转子包括电枢铁心、电枢绕组以及换向器,实现电能与机械能之间的转换[9]。永磁有刷直流电机也可吸收被测电机输出的机械能并转换成电能,通过后级负载电阻消耗掉。
选用北京博锐创科技有限公司生产的BRH8200传感器为转速转矩传感器,其转矩量程为200 N·m,精度为0.5%,转速量程为5 000 r/min,配备扭矩及转速显示仪表。
BHR8200的转矩测量传感器采用应变片电测技术,在弹性轴上组成应变桥,当向应变桥供电时,即可测得弹性轴上所受扭力的电信号。通过放大该应变信号后,再经过压/频转换,得到与扭力应变桥成正比的频率信号,如图3所示。
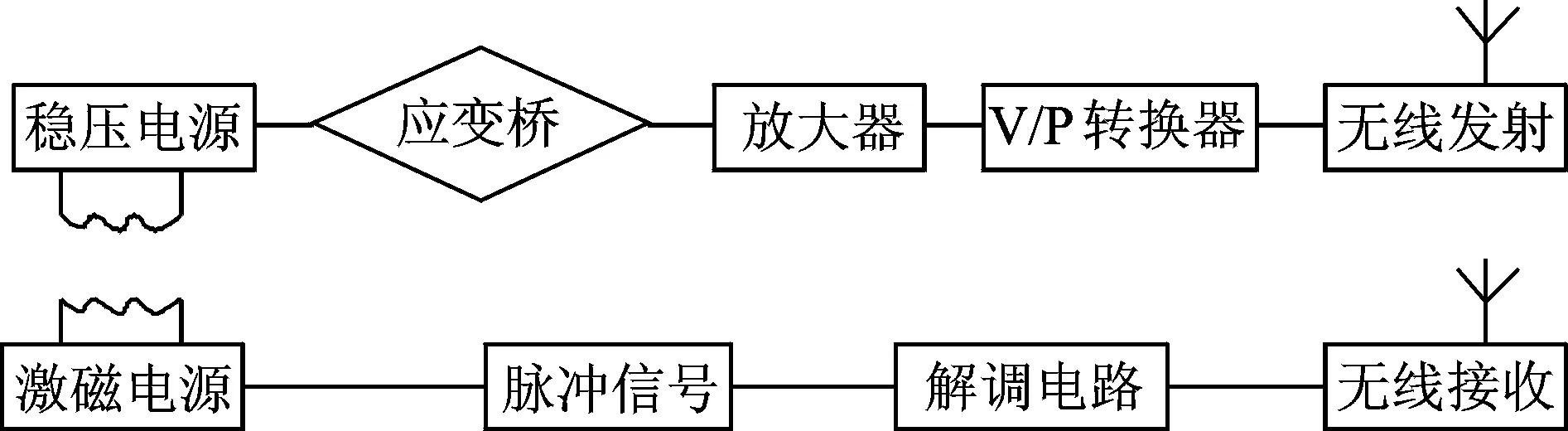
图3 传感器原理图Fig.3 Schematics of torque sensor
BHR8200的转速测量传感器采用磁电码盘,每一个磁电码盘上有60个齿,通过轴带动磁电码盘,则每旋转一周即可产生60个脉冲,高速或中速时用测频方法测量转速,低速时用测周期方法测量转速。
在测量范围内,控制电路能对直流加载电机进行恒转速和恒转矩控制,即当被测电机输出转矩改变时,系统可提供恒定的任意转速;当被测电机的输出转速改变时,系统可提供恒定的负载转矩[10]。
控制电路由信号发生器输出PWM脉冲信号,控制电力MOS管FQA70N10的开关状态,改变永磁有刷直流电机电枢电流大小,以改变作为发电机状态时所产生的反力矩。FQA70N10属于N沟道MOSFET,是一种单极型电压控制器件,通过栅极电压控制漏极电流,其电压等级为100 V,额定电流为70 A,输入阻抗高,输入电流小,工作频率可达几十kHz,耐破坏性强,热稳定性能优于多数其他功率器件。为了保护MOSFET,确保MOSFET过载电流的能力,控制电路采用了两片FQA70N10并联电路。
为了避免强弱电互相干扰,设计了基于带光电隔离的MOS管驱动芯片TLP250芯片的驱动电路,控制电路如图4所示。M1,M2分别接永磁有刷直流电机的两个输入端,PWM信号经过TLP250隔离输出控制两个并联的MOS管FQA70N10,负载电阻R17与永磁有刷直流电机串联,电机工作电流随着PWM信号改变。负载电阻为两个5 Ω,500 W陶瓷电阻并联。当永磁有刷直流电机以发电机方式工作时,其输出的电能直接消耗在陶瓷电阻上。

图4 控制电路图Fig.4 Control schematic
3 实验结果与分析
笔者设计的永磁直流测功机系统所用的加载电机为永磁有刷直流电机,其直流额定电压为60 V、电流为50 A、转速为3 000 r/min、功率为2.5 kW。选用常用的无刷直流轮毂电机为被测电机,其直流额定电压为48 V,500 W。选取5个性能参数相同的无刷直流轮毂电机对其进行编号,1~4号电机为装有橡胶轮胎,5号电机为无轮胎,如图5所示。

图5 无刷直流轮毂电机Fig.5 Brushless DC hub motor
当被测电机的速度设定值为150 r/min时,1~5#被测电机的转矩与转速关系如图6所示。可以看出1~5#电机转矩与转速的对应关系,被测电机的转矩/转速变化规律相同,重复性好。
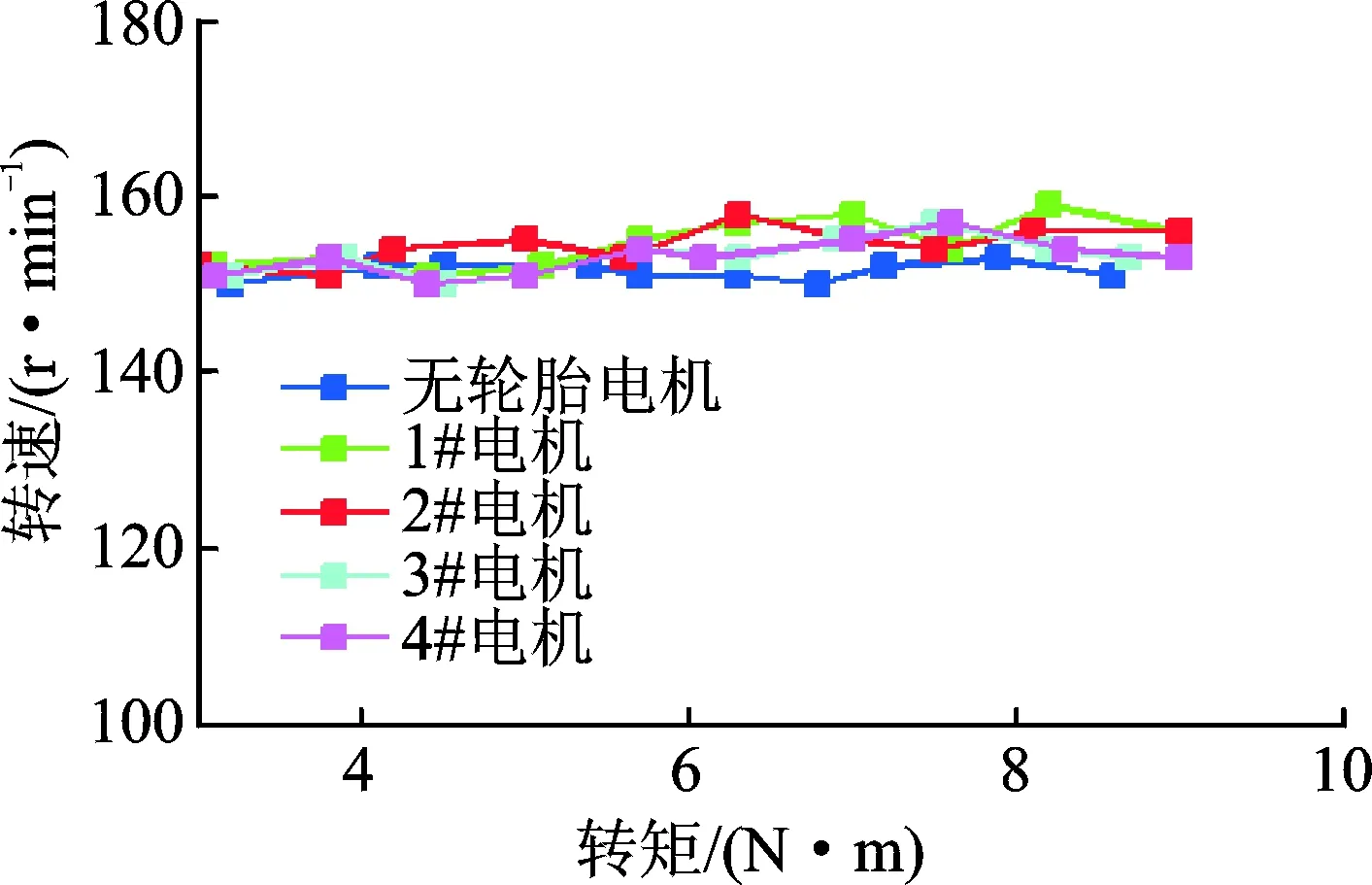
图6 150 r/min时转矩与转速关系Fig.6 Torque and speed at 150 r/min
被测电机保护电路限流10 A,当被测电机转速为150 r/min时,被测电机始终处于速度闭环控制下,并未触发保护电路。对1~5#被测电机的转矩、转速实验数据进行线性拟合,经计算得到
Y1=1.054 5X1+148.351 9
(6)
Y2=0.703 6X2+150.231 8
(7)
Y3=0.706 5X3+148.867 9
(8)
Y4=0.661 7X4+149.129 9
(9)
Y5=0.116 9X5+150.701 9
(10)
式(6)~(9)分别为1~4#被测电机拟合曲线表达,式(10)为无轮胎电机拟合曲线。
当转速为150 r/min时,1~4#被测电机分别与5#无轮胎电机转矩和转速的相关性如表1所示。1~4#被测电机之间转矩和转速的相关性如表2所示。
从表1~2可以看出,1~4#电机转矩、转速之间线性相关性都在0.99以上,1~4#电机与5#电机转矩、转速相关性也在0.99以上,这几个电机的转速转矩特性一致性较好。
表1 5#电机与1#~4#被测电机转矩与转速相关性(转速为300 r/min)

Tab.1 5# Correlation of torque and speed(speed at 300 r/min)
表2 1#~4#被测电机间转矩与转速相关性(转速为150 r/min)
Tab.2 1#~4# Correlation of torque and speed(speed at 150 r/min)

电机编号测量参数1#2#3#4#1#转矩/(N·m)1.00000.99970.99930.9996转速/(r·min-1)1.00000.99900.99890.99892#转矩/(N·m)0.99971.00000.99850.9991转速/(r·min-1)0.99901.00000.99840.99843#转矩/(N·m)0.99930.99851.00000.9990转速/(r·min-1)0.99890.99841.00001.00004#转矩/(N·m)0.99960.99910.99901.0000转速/(r·min-1)0.99890.99841.00001.0000
当被测电机速度设定值为150 r/min时,1~5#被测电机转矩与电流关系如图7所示。可见,1~5#电机转矩与电流的变化规律相同,重复性好。

图7 150 r/min时转矩与电流关系Fig.7 Torque and current at 150 r/min
从表3~4可以看出,1~4#电机转矩、电流之间线性相关性都在0.99以上,1~4#电机与5#电机转矩、电流之间相关性也在0.99以上,转速转矩特性一致性较好。
同样,对1~5#被测电机的转矩、转速实验数据进行线性拟合,经计算得到
Y1= 0.557 9X1-0.248 6
(11)
Y2= 0.520 5X2+0.022 9
(12)
Y3= 0.535 4X3-0.127 2
(13)
Y4= 0.574 2X4-0.185 3
(14)
Y5= 0.521 8X5-0.175 1
(15)
式(11)~式(14)分别为1~4#被测电机拟合曲线表达式,式(15)为无轮胎电机拟合曲线表达式。
当转速为150 r/min时,1~4#被测电机分别与5#无轮胎电机转矩和电流的相关性如表3表所示。1~4#被测电机之间转矩和电流的相关性如表4所示。被测电机的保护电路限流为10 A,在测功机对被测电机进行模拟加载的过程中,被测电机处于速度闭环、电流截止的控制下,过载导致触发保护电路,速度急速下降,对1~5号被测电机的转矩、转速实验数据进行线性拟合,经计算得到
表3 5#电机与1#~4#被测电机转矩与电流的相关性(转速为150 r/min)
Tab.3 5# Correlation of torque and current(speed at 150 r/min)

电机参数1#2#3#4#5#转矩/(N·m)0.99740.99740.99580.9953电流/A0.99600.99320.99100.9894
表4 1#~4#被测电机之间转矩与电流的相关性(转速为150 r/min)
Tab.4 1#~4# Correlation of torque and current(speed at 150 r/min)

电机编号测量参数1#2#3#4#1#转矩/(N·m)1.00000.99950.99910.9992电流/A1.00000.99820.99570.99612#转矩/(N·m)0.99951.00000.99820.9982电流/A0.99821.00000.99490.99223#转矩/(N·m)0.99910.99821.00000.9989电流/A0.99570.99491.00000.99194#转矩/(N·m)0.99920.99820.99891.0000电流/A0.99610.99220.99191.0000
式(16)~(19)分别为1~4#被测电机拟合曲线表达式,式(20)为无轮胎电机拟合曲线表达式。
当被测电机的速度设定值为300 r/min时,1~5#被测电机的转矩与转速关系如图8所示,被测电机的转矩/转速变化规律相同,重复性较好。

图8 300 r/min时转矩与转速关系图Fig.8 Torque and speed at 300 r/min
当转速为300 r/min时,1~4#被测电机分别与5#无轮胎电机转矩和转速的相关性如表5所示。1~4#被测电机之间转矩和转速的相关性如表6所示,其转矩和转速均具有较好相关性。
表5 5#电机与1#~4#被测电机转矩与转速相关性(转速为300 r/min)
Tab.5 5# Correlation of torque and speed(speed at 300 r/min)

电机1#2#3#4#5#转矩/(N·m)0.99780.99900.99630.9982转速/(r·min-1)0.99530.99860.95730.9952
表6 1#~4#被测电机间转矩与转速相关性(转速为300 r/min)
Tab.6 1#~4# Correlation of torque and speed(speed at 300 r/min)

电机编号测量参数1#2#3#4#1#转矩/(N·m)1.00000.99870.99580.9990转速/(r·min-1)1.00000.99790.94050.99282#转矩/(N·m)0.99871.00000.99490.9992转速/(r·min-1)0.99791.00000.94800.99753#转矩/(N·m)0.99580.99491.00000.9932转速/(r·min-1)0.94050.94801.00000.94394#转矩/(N·m)0.99900.99920.99321.0000转速/(r·min-1)0.99280.99750.94391.0000
当被测电机的速度设定值为300 r/min时, 1~5#被测电机的转矩与电流的关系分别如图9所示,可以看出被测电机的转矩/电流变化规律相同,重复性好。

图9 300 r/min时转矩与电流关系图Fig.9 Torque and current at 300 r/min
经过计算分别得到其拟合曲线关系式
式(21)~式(24)分别为1~4#被测电机拟合曲线表达式,式(25)为无轮胎电机拟合曲线表达式。
当转速为300 r/min时,1~4#被测电机分别与5#无轮胎电机转矩和电流的相关性如表7所示, 1~4#被测电机之间转矩和电流的相关性如表8所示。
表7 5#电机与1#~4#被测电机转矩及电流相关性(转速为300 r/min)
Tab.7 5# Correlation of torque and current(speed at 300 r/min)

电机编号1#2#3#4#5#转矩/(N·m)0.99780.99900.99630.9982电流/A0.99780.99850.99470.9969
表8 1#~4#被测电机间转矩及电流相关性(转速为300 r/min)
Tab.8 1#~4# Correlation of torque and current(speed at 300 r/min)

电机编号测量参数1#2#3#4#1#转矩/(N·m)1.00000.99870.99580.9990电流/A1.00000.99740.99450.99342#转矩/(N·m)0.99871.00000.99490.9992电流/A0.99741.00000.99460.99773#转矩/(N·m)0.99580.99491.00000.9932电流/A0.99450.99461.00000.98854#转矩/(N·m)0.99900.99920.99321.0000电流/A0.99340.99770.98851.0000
4 结束语
笔者设计的轮毂式永磁直流测功机系统可实现对0.1~2.0 kW轮毂电机进行转速、转矩及效率等测量。当被测电机的转速设定值为150, 300 r/min时,测得1~4#未装橡胶轮胎的被测电机性的性能参数变化规律一致,重复性好,被测电机运行较为稳定和可靠。未装橡胶轮胎的1~4#轮毂电机性能参数与有装橡胶轮胎的5#轮毂电机性能参数相近,变化规律相同。1~4#电机与5#电机转矩、电流之间相关性在0.99以上,这几个电机的转速转矩特性一致性好。该测功机可为被测电机提供大小可调的不同负载,运行稳定、响应速度较快,具有高可靠性、精确性和实用性,能够满足2 kW以下轮毂电机及盘式直流电机性能参数测试的需要。
[1] 董铸荣,梁松峰,田超贤. 纯电动汽车用直流无刷轮毂电机试验台架的研究与开发[J]. 机电工程, 2012, 29(10):1187-1190.
Dong Zhurong,Liang Songfeng,Tian Chaoxian. Study and development of test-bed for brushless DC hub-motor used in EV[J]. Journal of Mechanical & Electrical Engineering, 2012, 29(10):1187-1190.(in Chinese)
[2] 郭啸峰,吴森. 轮毂电机式电动汽车试验台的设计与实验[J]. 武汉理工大学学报:信息与管理工程版,2013,35(6):859-862.
Guo Xiaofeng,Wu Sen. Design and experiment study of test bench for in-wheel motor electric vehicles [J]. Journal of Wuhan University of Technology:Information & Management Engineering, 2013, 35(6):859-862.(in Chinese)
[3] 杨文敬,宋强. 车用驱动电机台架试验测试系统设计[C]∥第五届中国智能交通年会暨第六届国际节能与新能源汽车创新发展论坛优秀论文集(下册)——新能源汽车.深圳:[s.n.],2009:398-403.
[4] 粟明. 基于现场总线的电动汽车电机试验台系统[J]. 电工文摘, 2011,31(3):15-18.
Su Ming. Electric vehicle motor test bench system based on Fieldbus[J].Diangong Wenzhai, 2011,31(3):15-18.(in Chinese)
[5] 隋妮,王广萍,李仲兴,等. 直流无刷电机再生制动系统试验台的设计与验证[J]. 汽车技术, 2011,42(1):49-53.
Sui Ni,Wang Guangping,Li Zhongxing, et al. Design and verification of brushless dc motor regenerative braking system test bench [J]. Automobile Technology, 2011, 42(1):49-53.(in Chinese)
[6] 李茂森. 动力试验与测功机技术[J]. 电机与控制应用, 2006, 48(9):43-45.
Li Maosen. Power-train and dynamometer technology [J]. Electric Machines & Control Application, 2006, 48(9):43-45.(in Chinese)
[7] 张铁民,黄瀚,黄鹏焕. 电动轮式移动小车控制系统设计与试验[J]. 农业工程学报, 2014, 30(19):11-18.
Zhang Tiemin,Huang Han,Huang Penghuan . The design of power dynamometer experimental system [J]. Transaction of the Chinese Society of Agricultural Engineering, 2014, 30(19):11-18. (in Chinese)
[8] 樊志忠,殷沂柏. 一种新型的电机测功机[J]. 微电机, 1990,23(2):32-36.
Fan Zhizhong,Yin Qibai. A new motor dynamometers[J]. Micromotors Servo Technique, 1990, 23(2):32-36. (in Chinese)
[9] 张铁民,李辉辉,陈大为,等. 多源传感器信息融合的农用小车路径跟踪导航系统[J]. 农业机械学报,2015, 46(3):37-42.
Zhang Tiemin,Li Huihui,Chen Dawei,et al. The Design of power dynamometer experimental system [J]. Transactions of the Chinese Society for Agricultural Machinery, 2015, 46(3):37-42. (in Chinese)
[10]许水平,施蔚加,张文军. 电动汽车电传动试验系统[J]. 大功率变流技术, 2009,32(3):41-44.
Xu Shuiping,Shi Weijia,Zhang Wenjun. Test system for electric vehicle drive system [J]. High Power Converter Technology, 2009, 32(3):41-44. (in Chinese)
[11]许彦峰,孙汉旭,贾庆轩,等. 直流无刷电机故障检测与诊断的仿真模型[J]. 振动、测试与诊断, 2005, 25(3):190-192.
Xu Yanfeng,Sun Hanxu,Jia Qingxuan,et al. Simulation model of fault detection for brushless dc motor using parameter estimation[J].Journal of Vibration,Measurement & Diagnosis, 2005, 25(3):190-192. (in Chinese)
[12]田颖,金振华,卢青春. 基于PWM控制的电涡流测功机控制器的开发[J]. 汽车工程, 2010, 32(1):69-72.
Tian Ying,Jin Zhenhua,Lu Qingchun. Development of the controller for eddy current dynamometer based on pwm control [J]. Automotive Engineering, 2010,32(1):69-72. (in Chinese)
[13]相龙洋,左曙光,何吕昌,等. 电动汽车及其驱动永磁电机声振特性试验[J]. 振动、测试与诊断, 2014, 34(1):90-95.
Xiang Longyang,Zuo Shuguang,He Lüchang,et al. Experimental study on acoustic and vibration characteristics of electric vehicle and its permanent drive motor[J].Journal of Vibration,Measurement & Diagnosis, 2014,34(1):90-95. (in Chinese)
[14]Hadef M, Rachid Mekideche M. Moments and pasek′s methods for parameter identification of a DC motor[J]. Journal of Zhejiang University—Science C: Computers & Electronics, 2012, 12(2):124-131.
[15]黄晨,陈龙,袁朝春,等. 车辆底盘系统的快速原型仿真平台设计[J]. 振动、测试与诊断, 2013, 33(S2):91-94.
Huang Chen,Chen Long,Yuan Chaochun,et al. The design of the rapid prototype simulation platform for vehicle chassis system[J].Journal of Vibration,Measurement & Diagnosis, 2013, 33(S2):91-94. (in Chinese)

10.16450/j.cnki.issn.1004-6801.2016.05.002
*国家高技术研究发展计划(“八六三”计划)资助项目(SS2013AA100303); 广东省科技计划资助项目(2016A020209 008)
2014-07-26;
2014-10-14
TM306; TH39
张铁民,男,1961年11月生,博士、教授、博士生导师。主要研究方向为智能检测与控制技术、机电系统控制、自动化以及机器人技术。曾发表《四旋翼飞行器农田位置信息采集平台设计与实验》(《农业机械学报》2013年第44卷弟5期)等论文。
E-mail: tm-zhang@163.com
猜你喜欢
大电机技术(2022年5期)2022-11-17
汽车实用技术(2022年12期)2022-07-05
汽车实用技术(2022年5期)2022-04-02
上海涂料(2021年5期)2022-01-15
制造技术与机床(2017年10期)2017-11-28
电子制作(2017年1期)2017-05-17
制造业自动化(2017年2期)2017-03-20
电子制作(2016年1期)2016-11-07
汽车维修与保养(2015年6期)2015-04-17
汽车维修与保养(2015年6期)2015-04-17
