
基于FPGA的通用开放式星载陀螺模拟器设计
2016-11-23 10:02:35毛晴,梁军,刘赞,周军
计算机测量与控制 2016年5期
毛 晴,梁 军,刘 赞,周 军
(1.哈尔滨工业大学 电气工程及自动化学院,哈尔滨 150080;2.上海卫星工程研究所,上海 200240)
基于FPGA的通用开放式星载陀螺模拟器设计
毛晴1,梁军1,刘赞2,周军2
(1.哈尔滨工业大学电气工程及自动化学院,哈尔滨150080;2.上海卫星工程研究所,上海200240)
陀螺是小卫星平台上姿轨控制分系统中的重要敏感元件,而陀螺模拟器是小卫星姿轨控制分系统地面测试过程模拟陀螺仪的数据流向和时序关系的必要设备;针对通用化的小卫星陀螺模拟器的设计需求,开发了一种基于FPGA和CAN总线接口的陀螺模拟器,采用了FPGA作为主控芯片,实现了支持多类常用星载陀螺数据通信协议的实时接口,并配置了具备电平隔离功能的CAN、RS-485等总线接口电路,实际配置一种工作状态的测试和实验验证表明,所设计的陀螺模拟器具有较高的可靠性和良好的通用性。
小卫星;陀螺;模拟器;FPGA;CAN总线
0 引言
由于传统卫星研制与发射过程中的高成本和高风险,随着集成化技术和一体化技术的发展,在降低卫星成本和风险的同时,人们也希望能够缩短研制周期,小卫星技术便成为了一个热门领域。与传统卫星相比,小卫星体积小,质量轻,研制周期短,组网机动灵活,广泛应用于通信,军事等领域[。
小卫星由卫星平台和有效载荷组成,有效载荷是执行卫星任务的设备,卫星平台是小卫星的核心部分,包括星载计算机,电源,测控和姿轨控制系统等[3],其中,姿轨控制系统是保持卫星姿态稳定,保证天线指向目标地点的重要分系统[4],陀螺则是该分系统中感知卫星姿态的主要组成设备之一。可以为载体提供准确的方位、水平、角速度、角位移等位置信息,协助控制系统完成对载体的姿态和运动轨迹控制。
星载陀螺可以概括为两大类,一类是动态范围小但是精度高的平台陀螺,另一类是动态范围大但是精度相对较低的捷联式惯导系统中的陀螺,例如基于Sagnac效应的激光陀螺和光纤陀螺[5]。
由于卫星在发射之后难以控制与调整,因此,在地面上对其进行全面的测试是很重要的[6],在小卫星研制过程中,不可能等待所有模块就位后再进行测试,尤其陀螺仪又是一种较难搭建测试平台的仪器,因此在小卫星研制初期,需要使用陀螺模拟器参与半实物仿真,节约研制时间和开发成本[7]。
目前,美国与英国在卫星信号模拟方面的研究起步较早,已有比较完整的模拟软件和工业成品。相比之下,我国这方面研究起步较晚,国内自主知识产权的产品研发还比较薄弱。目前国内只有北京航空航天大学、和航天某研究所在从事卫星信号模拟器方面的研究,并且基本都处于初级阶段[3]。
1 陀螺模拟器需求分析
陀螺模拟器的主要任务是模拟星载陀螺的接口工作时序和数据流向关系。由于陀螺是一种可以支持多种接口的设备,所以本任务具体来说就是设计一个可以支持目前国内小卫星上使用的总线接口的陀螺模拟器。小卫星上可以使用的数据总线种类繁多,如MIL-STD-1553B总线、spacewire总线、Ethernet总线、CAN总线、RS-485总线和光纤总线等,其中大部分,例如美国军方制定的MIL-STD-1553B总线,控制方式、传输速度和灵活性都非常高,但是由于功耗大,要求高,在小卫星领域的发展有限[8],目前国内小卫星上使用的总线主要是传统的RS-422总线和RS-485总线以及可靠性较高的CAN总线,Ethernet总线也曾在我国小卫星上有过使用,但是并不是用于传输陀螺信号。
从通用性、可扩展性、可靠性、实时性等设计原则考虑模拟器的需求。为了保证模拟器的通用性,模拟器需要能够支持比较经典的传统总线和目前我国小卫星上应用广泛的CAN总线;由于星上中心计算机有可能对陀螺数据有刷新率的要求,硬件有可能采用点对点的连接方式,因此传输速率较慢的传统总线需要多路来模拟不同方向的陀螺输出,CAN总线由于其数据传输速度较高,采用广播式就可以满足数据刷新率的要求,因此只需要使用两路进行相互备份来提高模拟器的可靠性;为了保证所设计陀螺模拟器的集成度和稳定性和实时性,需要使用主控芯片对各个接口的数据收发及时序进行统一的管理,并且由于使用多路数据总线,对主控芯片的并行性要求也比较高,根据需求选择FPGA作为主控芯片,并且通过模块化的方式编写逻辑,能够获得较好的通用性。
本模拟器与动力学计算机和星载中心计算机的通讯原理可以概括如下,动力学计算机通过RS-485总线将陀螺数据组帧发送到模拟器,模拟器接收数据帧之后将数据帧拆解,将要接收的陀螺数据存入指定寄存器。模拟器与星载中心计算机通过RS-422总线和CAN总线实现通讯,在某一路总线收到指定的命令帧之后,在时序要求的范围内返回陀螺位置信息数据,实现对真实陀螺的接口数据流向和时序关系的模拟。
通过综合分析陀螺模拟器的需求,得到技术要求如下:
1)一个RS-485接口:2线双绞屏蔽差分线和地线;通信波特率为11 5200 bps,1位起始位,8位数据位,无校验位,1位停止位;
2)两个CAN接口:CAN 2.0B规范;通信波特率为800 kbps;
3)4个RS-422接口:异步串行接口,每个接口为4线双绞屏蔽差分线和地线,波特率为19 200 bps,1起始位,8数据位,1奇校验位,1停止位。
2 陀螺模拟器方案设计
通过前面的分析,设计出硬件结构框图如图1所示。
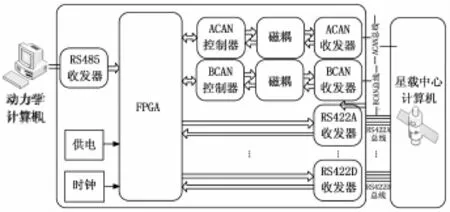
图1 陀螺模拟器硬件结构框图
由于任务需要模拟多路陀螺,尤其是RS-422由于中心计算机对陀螺数据刷新率的要求,有可能使用点对点的数据传输方式,因此对接口的数量要求较多,如果直接使用专用的协议控制器会导致电板上芯片过多,成本较高,而且也无法将所有接口的信息依照统一的时序进行处理,编程较为复杂。因此,采用了可编程逻辑器件FPGA作为主控制器,各路通信总线接口接入FPGA,取代了种类繁多并且数量较大的专用协议控制芯片,使得整个系统可以工作在统一的时序中[11],编程相对容易,FPGA是一种并行处理芯片,也同时获得了很好的并行性,保证了模拟器能够进行实时通信。并且由于FPGA可以方便的修改内部的逻辑,可以方便的改变逻辑中的一些参数,模拟不同的陀螺通信协议,来获得良好的通用性。
FPGA内部逻辑模块组成如图2所示,逻辑进行模块化设计能够比较灵活的配置通信协议模块,适应不同的接口模拟任务。可以方便的增加或者减少模块,提高了程序的灵活性和模拟器的扩展性。
3 硬件设计
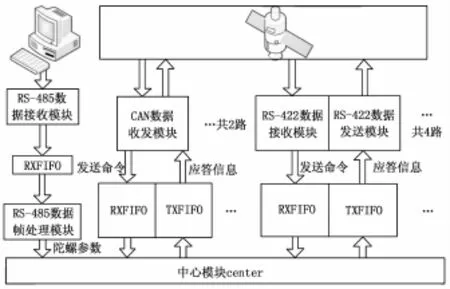
图2 陀螺模拟器内部逻辑模块组成
在本模拟器的设计中,为了保护星上的其他设备的安全,总线接口电路与主控制器之间需要进行电平隔离,防止在地面测试系统中受到电压浪涌时,不会通过总线毁坏挂载在总线上的其他设备。
RS-485总线与RS-422总线的接口电路结构一致,如图3所示。RS-485总线与RS-422总线的接口电路主要由两部分组成:主控制器FPGA(EPIC12Q240C8)和支持RS-485总线和RS-422总线的收发器IL422。通过对收发器IL422芯片使用双电源供电,连接总线端电压使用DCR电源隔离芯片进行供电隔离,防止大电压冲击烧坏总线上的器件。总线接口采用4线双绞屏蔽差分线和地线实现全双工收发。
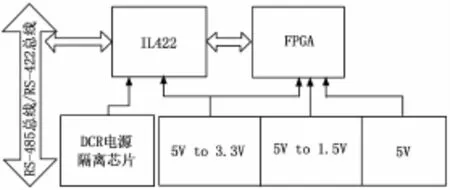
图3 RS-485总线接口示意图
CAN总线接口电路如图4所示,接口电路主要由主控制器FPGA、CAN控制器SJA1000T、双通道数字隔离器(ADUM1201BR)和CAN驱动器SN65HDV1050四部分组成。FPGA供电部分与RS-485和RS-422的接口电路类似,通过在CAN控制器和CAN驱动器之间加入双通道数字隔离器即磁耦,其与CAN控制器连接端和CAN控制器采用DCR010505DIP进行供电,来实现CAN总线上各节点间的电气隔离。CAN总线接口使用一对差分双绞线实现半双工收发。相比于传统使用光耦来进行隔离,磁耦因为其体积小、功耗低、寿命长、传输速率快等原因更适合航天任务的需求。
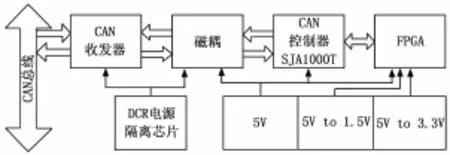
图4 CAN总线接口示意图
4 固件设计
根据方案设计中FPGA的模块化设计,模块之间的工作过程如下:动力学计算机通过RS-485总线向陀螺模拟器发送飞行器状态数据广播帧,由RS-485数据接收模块按字节接收,并将接收的完整飞行器状态数据广播帧暂时存入RS-485的RXFIFO,然后由RS-485数据帧处理模块对完整的广播帧进行判断和拆帧,将判断为可以接收的数据广播帧中的陀螺信息数据存入指定的寄存器由中心模块继续处理。当CAN总线或者RS-422总线上有来自星载中心计算机的数据帧传来时,由对应的接收模块进行接收,并将接收到的信息存入对应的接收缓冲区。由中心模块从接收缓冲区中读取并且判断是否为等待的命令帧,若不是则丢弃,如果是发送命令,中心模块从寄存器中取出对应的陀螺位置信息数据送入发送缓冲区。由对应的发送模块从发送缓冲区读出数据并且组帧发送。当模拟的陀螺通信协议有所改变时,可以通过改变收发模块中的字节长度参数和中心模块中的判断的命令帧内容及待发送数据在寄存器中的位置来适应不同种类的陀螺,以获得良好的通用性。
4.1动力学计算机—陀螺模拟器的数据帧结构
由于RS-485和RS-422总线只对电气层面的协议做出了规定,对数据帧的结构并没有要求,由于本模拟器的RS-485采用的是广播式全局发送,结合较为常见的RS-485总线数据链路层协议MODBUS,采用其字节传输格式,并设计了如表1的数据帧结构。

表1 RS-485数据帧结构
一个陀螺位置信息数据帧包含4部分:帧头作为识别标志,作为模拟器检测识别信息帧的依据;数据域包括需要模拟的所有陀螺的位置信息数据,其字节长度可以根据需要设定,只需要更改接收模块中的接收字节数目的参数就可以适应不同的需求;校验域用于对接收的数据进行累加和校验,如果计算的累加和与接收到的校验和不一致,说明接收数据出错,放弃本次接收。
在RS-485和RS-422总线上,数据以字节为单位传输,结合技术要求,参照MODBUS协议,模拟器采用的传输字节结构如表2所示。

表2 RS-485字节结构
4.2陀螺模拟器—星载中心计算机的数据帧结构
不同种类陀螺的主要区别在于动态范围的大小和精度的高低,具体在输出数据层面表现为输出数据的位数不同。星载陀螺分为两大类,以静电陀螺为代表的平台陀螺,其动态范围小,精度高,一般输出为2个字节,和以光纤陀螺为代表的捷联惯导系统中的陀螺,其动态范围大,精度也比较高,一般输出为4个字节。陀螺输出可以使用的总线种类非常全面数据协议主要是根据实际任务确定,可以根据硬件连接方式简单分为两大类:点对点收发和全局广播式收发。根据星载陀螺的数据输出特点,设计了陀螺模拟器与中心计算机之间的数据帧格式,如图5、表3和表4所示。
模拟器与中心计算机通过CAN总线传输的数据帧格式为扩展数据帧,结构为ID号、控制域、数据域和CRC校验域[14]。通过将数据域中使用不到的字节设为缺省态AA,可以模拟不同输出精度的陀螺。在收到一次发送命令之后,依次发
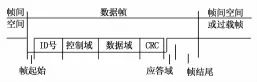
图5 CAN总线扩展数据帧格式
送4路陀螺位置信息数据帧,是一种全局广播式的收发方式。
表3 RS-422总线点对点通信的数据帧结构

表4 RS-422总线点对多通信的数据帧结构
RS-422总线上数据传输的帧格式与RS-485类似,可以根据硬件连接方式使用两种收发方式来模拟陀螺的两种输出模式。可以使用4路RS-422进行点对点传输,这种模式可以省去帧头和帧尾,只保留数据域和校验域。或者使用其中1路进行点对多传输,即将多路陀螺数据组装为一个数据帧发送,这种发送模式需要使用帧头和帧尾进行识别。RS-422总线和RS-485总线的据帧中的数据域的长度较为自由。
5 测试
为了测试模拟器能否正常工作,配置了一种实现状态,模拟4路光纤陀螺和4路点对点通信的平台陀螺的接口功能,为进行验证测试,采用的测试仪器如表5所示。
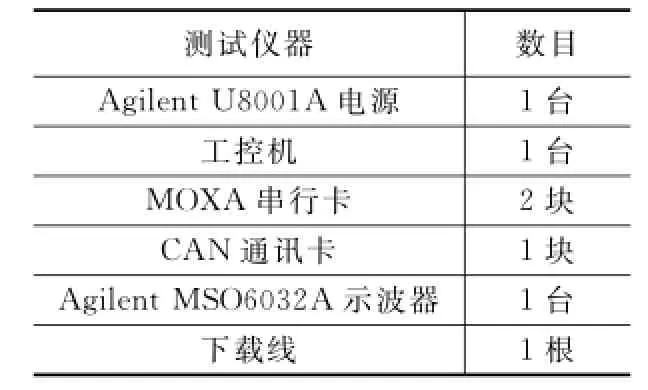
表5 测试设备及数量
经过测试,陀螺模拟器可以实现如下功能:
1)能够接收RS-485总线上的数据并进行拆解存储;
2)4路RS-422总线能够接收命令帧并返回正确的陀螺位置信息数据帧;
3)CAN总线可以在收到命令帧之后依次返回4路陀螺位置信息数据帧。
其中RS-422总线收发的测试结果如表6所示,CAN总线收发的测试结果如表7所示测试结果表明,陀螺模拟器能够满足实际需求。
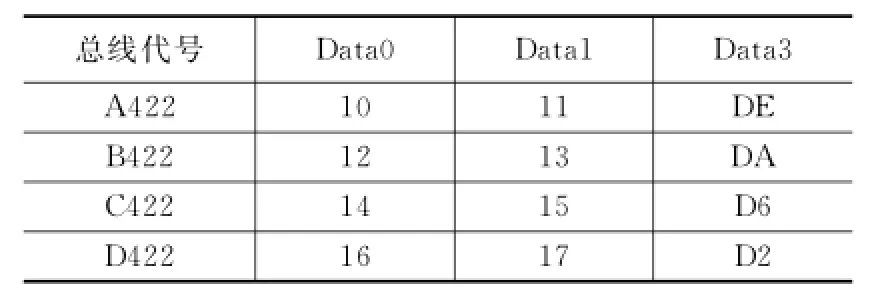
表6 RS-422总线命令帧接收及应答帧发送结果
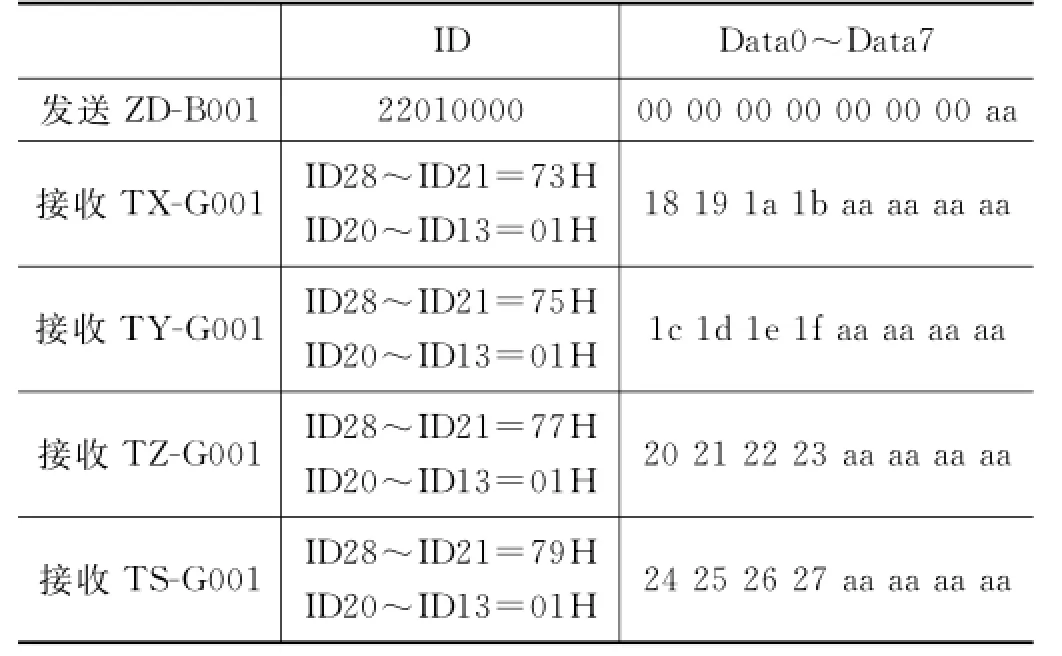
表7 CAN总线命令帧接收及应答帧发送
测试结果如表所示,实际测试结果表明陀螺模拟器可以满足需求。
6 结论
在对陀螺模拟器的工作原理和需求进行分析的基础上,设计了一个基于FPGA的多接口集成陀螺模拟器,可以模拟真实陀螺的接口数据流向和时序关系,控制方式简单,可靠性高,通用性强。
本设计采用FPGA作为主控芯片,将4路RS-422总线、2路CAN总线和1路RS-485总线接口集成在单个模拟器模块上,实现了对小卫星平台上的平台陀螺和捷联式惯导平台中陀螺的正常工作状态的接口信号的模拟。基于模块化开发的固件,可以方便的适应多种陀螺模拟任务。测试结果表明该陀螺模拟器可以正常工作,并通过修改部分参数可以模拟不同型号的陀螺输出,具有良好的通用性。
本文设计的星载陀螺模拟器主要是针对正常工作状态下的陀螺接口进行模拟,如果需要进行更加复杂的故障或异常工作模式模拟,还需要进行固件的扩展设计。
[1]林来兴,张小琳.现代小卫星与大众化空间时代[J].航天器工程,2015,3:75-84.
[2]林来兴.协同小卫星系统和服务[J].航天器工程,2013,22:110-118.
[3]张艳娥,常江,秦洁.现代小卫星技术与应用专题讲座(一)第1讲现代小卫星技术现状与发展[J].军事通信技术,2006,2(2):71-76.
[4]詹亚锋,马正新,曹志刚.现代微小卫星技术及发展趋势[J].电子学报,2000,28:102-106.
[5]张宗麟.惯性导航与组合导航[M].北京:航空工业出版社,2000.
[6]赵光权,徐犇,张毅刚.小卫星测试系统设计与实现 [J].计算机测量与控制,2011,19(3):503-505.
[7]吴锦杰,张斌斌,项军华,等.基于部件模拟等效器的卫星姿态控制仿真系统[J].系统仿真学报,2013,25(4):641-644.
[8]Li J,Chai M.Design of 1553B avionics bus interface chip based on FPGA[A].2011 International Conference on IEEE Electronics,Communications and Control(ICECC)[C].2011:3642-3645.
[9]赵剑,尤政,张高飞.小卫星常用数据总线技术 [J].中国航天,2007,2:35-37.
[10]张文凯,关桂霞,赵海盟,等.小卫星模拟系统中多路串行通信系统设计[J].计算机应用,2013,33(12):3477-3481.
[11]赵光权,郑博,梁军.小卫星通用模拟器设计[A].2009中国仪器仪表与测控技术大会[C].2009.
[12]Ben Y Y,Chai Y L,Wei G,et al.Analysis of Error for a Rotating Strap-Down Inertial Navigation System with Fibro Gyro[J]. Journal of Marine Science& Application,2010,9 (4):419-424.
[13]Lefevre H C.The fiber-optic gyroscope[M].Artech house,2014.
[14]Farsi M,Ratcliff K,Barbosa M.An overview of controller area network[J].Computing&Control Engineering Journal,1999,10(3):113-120.
Design of Gyro Simulator for Small Satellite with FPGA
MaoQing1,LiangJun1,LiuZan2,ZhouJun2
(1.School of Electrical Engineering and Automation,Harbin Institute of Technology,Harbin150080,China;2.Shanghai Institute of Satellite Engineering,Shanghai200240,China)
Gyro is an important sensitive unit in pose rail control subsystem on small satellite platforms.And gyro simulator is a necessary equipment to simulate star sensor data and timing relationships on ground test for pose rail control subsystem on a small satellite platform. According to actual requirements,this work designed a gyro simulator based on FPGA and CAN bus in terface.FPGA is adopted as the master control chip,as a result,the universal types of data communication protocols are provided,including CAN bus,and RS-485 bus and RS-422 bus.An actual case study with a specific configuration for an application situation,the test and verification shows that the design of gyro simulator can achieve high reliability and good generality.
micro-satellite;gyroscope;simulator;FPGA;CAN-bus
1671-4598(2016)05-0160-03
10.16526/j.cnki.11-4762/tp.2016.05.046
TP337
A
2015-10-13;
2015-12-18。
毛晴(1993-),女,山东寿光人,在读硕士研究生,主要从事自动测试技术和智能测试数据理解方向的研究。
梁军(1969-),男,江苏扬州人,工学博士,副教授,主要从事自动测试技术、统计信号处理方向的研究。
猜你喜欢
小哥白尼(趣味科学)(2021年6期)2021-11-02 05:23:48
故事作文·高年级(2021年4期)2021-05-06 03:20:04
小哥白尼(神奇星球)(2021年11期)2021-03-08 09:00:18
小学生学习指导(低年级)(2019年10期)2019-10-16 08:12:34
学生天地(2019年6期)2019-03-07 01:10:46
军事文摘(2018年24期)2018-12-26 00:58:18
测控技术(2018年6期)2018-11-25 09:50:12
测控技术(2018年8期)2018-11-25 07:42:08
快乐语文(2018年36期)2018-03-12 00:56:02
装备环境工程(2015年5期)2015-02-28 01:20:24
