基于DSP Builder的直流力矩电机模糊PID控制
2016-11-22 09:09:38曹洪瑞张淑梅
化工自动化及仪表 2016年5期
曹洪瑞 张淑梅 张 艳
(1.中国科学院长春光学精密机械与物理研究所,长春 130033;2.中国科学院大学大珩学院,长春 130033)
基于DSPBuilder的直流力矩电机模糊PID控制
曹洪瑞1,2张淑梅1张 艳1
(1.中国科学院长春光学精密机械与物理研究所,长春 130033;2.中国科学院大学大珩学院,长春 130033)
为弥补常规PID控制方式在控制直流力矩电机转速方面的不足,提出一种模糊PID控制技术。给出了模糊PID控制算法模型及其流程。运用DSP Builder库模块搭建了模糊PID控制器的系统模型,并进行了仿真分析和转速控制实验,结果表明:模糊PID控制器获得的主要控制品质参数均优于常规PID控制器,当被控对象参数和结构发生较大变化时,模糊PID控制器的响应曲线与各动态特性参数未发生较大变化,较好地保持了系统的稳定性,达到设计要求,且仿真与实验结果一致。
模糊PID控制 直流力矩电机 转速控制 DSP Builder FPGA
力矩电机综合了伺服电机和驱动电机的特性,因而具有转速低、转矩大和控制简单的特点,可长期工作在堵转状态。直流力矩电机因具有调速功能、机械特性好、响应速度快及运转精度高等优势,广泛应用于平台式惯性导航、雷达及转台等高精度位置和速度控制系统中[1]。
目前,力矩电机的主要控制方式是PID控制,其算法简单、鲁棒性好、可靠性高。然而实际系统的纯滞后、非线性耦合及时变等特点会造成被控对象的不确定性,传统PID控制方法不能获得理想的电机控制效果,而且不能根据实际情况在线整定控制器参数,对参数变化适应力不强。为解决这一难题,研究人员采用超前-滞后控制算法[2]、模块化理论[3]、基于迭代学习的PID控制算法[4]及交叉耦合式PID控制算法[5]等对电机进行控制,但这些方法均需要确定被控对象的数学模型,因此在实际应用中难以实现、不便于操作且计算复杂。模糊PID控制方式可根据调试人员的经验总结出若干条调节规则,利用输入输出信息设计模仿人工智能对控制器进行控制。因此该方法具有不依赖控制对象的精确数学模型、鲁棒性好等优点,能够克服传统PID控制器在强干扰或负载、参数变化时调节随动性差的缺点,在复杂、难以建立精确数学模型的非线性控制过程中表现出优越的性能[6,7]。
目前,基于数字信号处理(Digital Signal Processing,DSP)的实验系统在控制领域中被广泛应用,其价格相对便宜、使用方便。然而在DSP中实现控制算法需要软件编程,然后以编译下载的方式实现,导致它在控制对象建模与控制算法研究方面灵活性较差。而随着可编程门阵列(Field Programmable Gate Array,FPGA)技术的发展,其功能集成度越来越高,融合了嵌入式微处理器、DSP等技术,极大地提高了系统设计的灵活性。
针对直流力矩电机控制方式的不足,笔者提出一种基于FPGA平台的实验系统设计方案,结合DSP Builder技术和模糊PID控制技术,将Simulink模型文件直接转换成控制器所用的代码文件,与硬件系统直接对接,实现对直流力矩电机转速系统的控制。
1 模糊PID控制算法
1.1直流力矩电机模型的不确定性
直流力矩电机应用于高精度伺服系统中时,摩擦力矩是影响系统性能的一个重要因素,摩擦力矩具有非线性、不确定性和滞后性,很难获得被控对象的数学模型。此外,电机周期性波动力矩、模型参数时变特性及负载波动等影响因素将导致在仿真中难以建立系统的精确模型,因此要获得较好的控制效果就需要对控制算法进行改进[8]。
1.2模糊PID控制算法
PID控制的思想是将偏差的比例、积分和微分通过线性组合构成控制量,对被控对象进行调节。其控制规律为:

其中,e(t)为系统输出与输入的偏差;Kp、Ki、Kd分别为比例、积分、微分系数。
模糊控制是在经典控制方法的基础上应用模糊集理论、模糊语言变量和模糊逻辑推理来模拟人的思维对系统进行控制,因而当被控对象发生变化时,模糊控制器能够参考设定的模糊控制规则,自动进行控制器参数修正,可极大地提高系统鲁棒性[9~13]。模糊PID控制器结构如图1所示,以偏差e和偏差变化率ec作为二维模糊控制器的输入,为满足不同时刻e和ec对PID参数自整定的要求,将Kp、Ki、Kd的变化量ΔKp、ΔKi、ΔKd作为控制器输出,利用模糊控制规则在线整定PID参数。模糊控制部分包括模糊化、模糊推理计算和解模糊化[14~16]。

图1 模糊PID控制器结构框图
为减小计算量,采用增量式PID控制算法,以PID控制器3个参数的变化量为输入,则Kp、Ki、Kd的计算式调整为:

将输入量e、ec的量化论域设为[-3,3],输出变量ΔKp、ΔKi、ΔKd的基本论域和量化论域均定为[-3,3],量化等级为{-3,-2,-1,0,1,2,3},将上述5个变量的模糊子集划分成{负大(NB),负中(NM),负小(NS),零(ZO),正小(PS),正中(PM),正大(PB)}7部分。三角形隶属度函数灵敏度较高,将它在变量论域范围内均匀分布,经试验,在NB处选择Z型函数,在PB处选择S型函数。
模糊推理是形成模糊控制规则的理论依据,在此,笔者采用Mamdani法,清晰化方式采用重心法。
模糊PID控制算法流程如图2所示,其中e(k)、ec(k)为输入量在第k个采样时刻的误差和误差变化率。
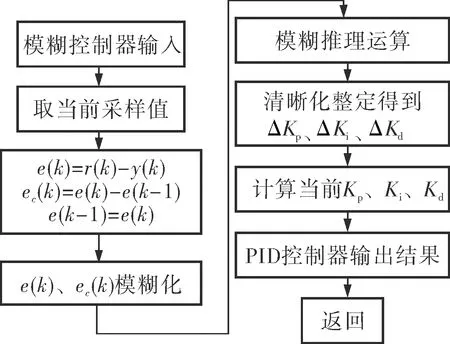
图2 模糊PID控制算法流程
2 模糊PID控制算法仿真
采用查表法利用DSP Builder对模糊控制器进行仿真的基本思想是:首先在离线情况下计算ΔKp、ΔKi、ΔKd的模糊控制规则表(表1~3);然后将模糊控制规则表存到存储器中;再将当前时刻的e和ec进行等级量化,根据等级量化结果对存储器进行寻址,输出ΔKp、ΔKi、ΔKd的精确值;最后在PID控制器3个参数初始值的基础上进行调整,得到最终的控制器参数。

表1 ΔKp模糊控制规则

表2 ΔKi模糊控制规则

表3 ΔKd模糊控制规则
FPGA设计的关键是对基于DSP Builder的内核控制器的设计。DSP Builder是基于Simulink的信号处理开发工具,支持FPGA的整个开发流程。DSP Builder是Quartus II软件与Simulink之间的接口,以工具箱的形式嵌在Simulink中,支持图形化建模与仿真。使用Signal Compiler将建立的图形化模型转换成HDL文件,在Quartus II中可直接调用。
图3中的Fuzzy controller模块即为查表法的模糊控制器,模型搭建完成后,将模糊控制表存储在ROM中,运行时直接调用,能够便捷地从硬件层面对算法进行验证和改进。

图3 仿真系统结构框图
系统仿真时间设为4s,得到常规PID控制器和模糊PID控制器的仿真动态特性参数见表4。可以看出,使用模糊PID控制器的电机调速系统的超调量、调节时间及上升时间等动态特性指标均优于常规PID控制器。相比于传统PID控制器,模糊控制器最重要的优势在于当被控对象的参数或结构由于各种外界干扰发生较大改变时,依然能保证系统的稳定性,或者只需要经过少量的调试工作就能达到新的稳定状态。

表4 动态特性参数
为验证所设计的模糊PID控制器的性能,根据已有的直流力矩电机的参数,选取3个不同的被控对象,在不改变控制器其他参数结构的前提下,得到的系统响应曲线如图4所示。可以看出,当被控对象变化时,系统响应曲线并未发生明显变化,系统稳定性较好。

图4 变被控对象模糊PID响应曲线
综上,模糊PID控制器不仅对被控对象参数变化适应能力强,而且在被控对象模型结构发生较大改变的情况下,也能获得较好的控制效果,抑制扰动的性能较好,体现了模糊PID控制算法的优越性。
3 实验验证
3.1实验系统组成
控制算法验证实验系统结构框图如图5所示,其中驱动模块将220V交流电转换成输出电压可控的直流电压进而对电机进行调压调速,FPGA和DSP Builder模块完成直流电机运动状态数据的采集、传输和控制,上位机用于进行参数设定和数据显示。

图5 实验系统结构框图
电机转速控制实验分为两部分:一是在同一台直流力矩电机上分别使用常规PID和模糊PID控制器进行转速控制,观察速度调节过程和速度平稳性,并比较两种控制算法的特点;二是在3台不同参数的直流力矩电机上使用同一模糊PID控制器进行转速控制实验,比较当被控对象发生改变时的系统动态特性。
3.2同一台直流力矩电机的转速控制实验
同一台直流力矩电机分别在常规PID控制器和模糊PID控制器下得到的主要动态特性参数见表5,输入目标转速为500r/min,电机转速具体数值由编码器测得。

表5 转速实验动态特性参数
实验数据表明,对同一被控直流力矩电机而言,模糊PID控制器响应曲线的动态特性和稳定性较好,等速运行时转速波动小,平稳性好于常规PID控制,能获得更好的控制效果,且与仿真结果一致。
3.3不同参数直流力矩电机的转速控制实验
选取3款不同的直流力矩电机在不改变模糊PID控制器参数的前提下进行转速控制实验,得到的转速响应曲线如图6所示。可以看出,在被控电机的结构和参数发生变化时,响应曲线并未发生较大改变,曲线1(1/(0.012s2+1.21s+1))的超调约23%,调节时间1.3s,上升时间0.21s;曲线2(1/(0.2s2+3.21s+3))的超调约26%,调节时间1.2s,上升时间0.18s;曲线3(1/(4s+2))的超调约22%,调节时间1.4s,上升时间0.23s。实验数据表明,改变被控直流力矩电机时,系统动态特性未发生较大变化,不需要人工调整模糊PID控制器参数,自身就能很好地维持系统稳定性。
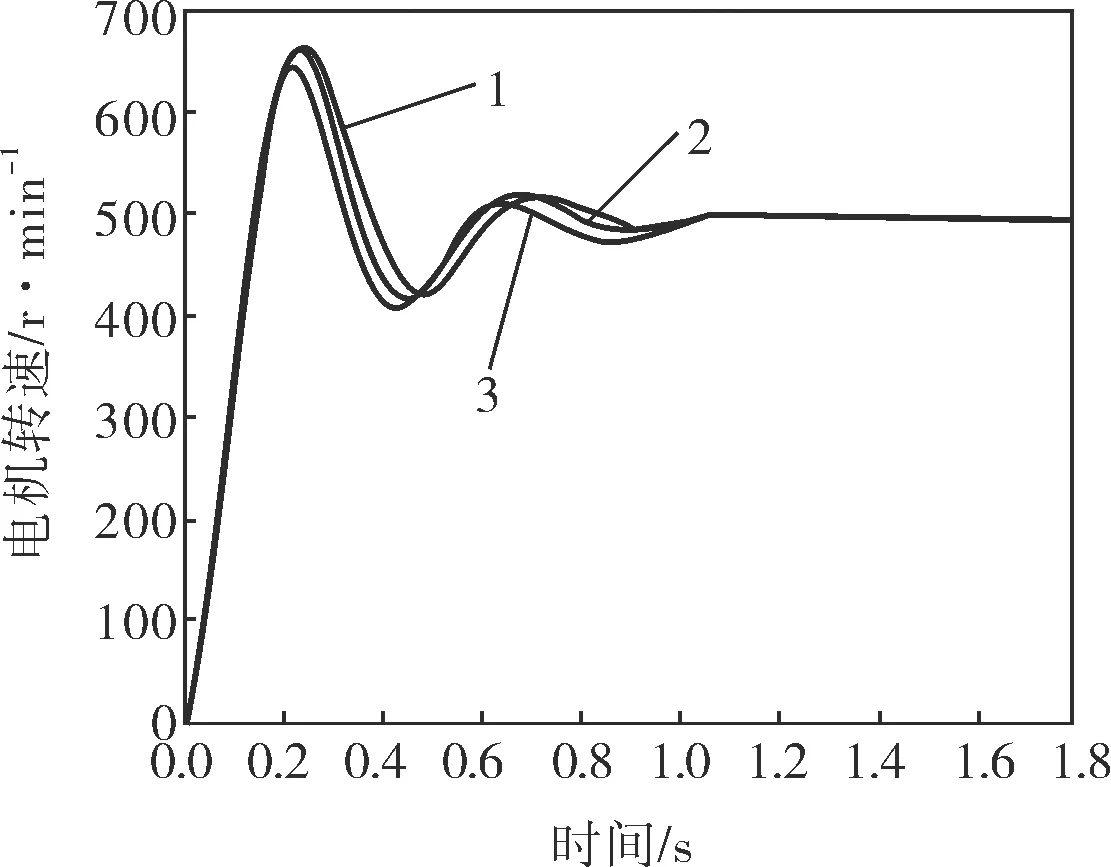
图6 不同直流力矩电机的转速响应曲线
4 结束语
笔者提出的模糊PID控制器融合了常规PID控制和模糊控制的优点,实现了对PID参数的实时在线整定。对同一被控直流力矩电机进行两种不同控制方式的转速控制实验和对不同被控直流力矩电机进行模糊PID控制的转速控制实验结果表明,所设计的模糊PID控制器获得的转速曲线超调量约22%,调节时间1.3s,上升时间0.21s,相比于常规PID控制器各参数均有9%~13%的提升;当改变被控对象时,模糊PID控制器的响应曲线各动态特性参数未发生较大变化,较好地保持了系统的稳定性,达到设计要求,且仿真结果与实验数据一致。将模糊PID控制技术应用于直流力矩电机转速控制领域具有较大的应用前景,对力矩电机转速控制系统的进一步发展具有重要的借鉴意义。
[1] 庞新良,赵薇薇,范大鹏,等.直流力矩电机在机载光电伺服系统中的应用研究[J].红外技术,2007,29(10):573~578.
[2] 郑艳文,王彤宇,林琳,等.基于DSP的二轴转台伺服控制系统设计[J].机电工程,2013,30(2):210~213.
[3] 刘家发,吴训成,张珏成.基于Matlab/Simulink的无刷直流电机仿真控制[J].上海工程技术大学学报,2013,27(4):352~356.
[4] 陈建强,徐洪泽.基于迭代学习的PID控制器在直流电机控制中的应用[J].微特电机,2013,41(2):38~41.
[5] 宋飞飞,王志胜.交叉耦合式的双直流力矩电机同步控制[J].机械与电子,2013,(1):64~67.
[6] Dong H K.Intelligent Tuning of a PID Controller for Multivariable Process Using Immune Network Model Based on Fuzzy Set[C].2001 the 10th IEEE International Conference on Fuzzy Systems.Seoul:IEEE,2001:93~98.
[7] Dong H K.Tuning of a PID Controller Using an Artificial Immune Network Model and Local Fuzzy Set[C].Joint 9th IFSA World Congress and 20th NAFIPS International Conference.Vancouver:IEEE,2001:2698~2703.
[8] Akbari-Hasanjani R,Javadi S,Sabbaghi-Nadooshan R.DC Motor Speed Control by Self-tuning Fuzzy PID Algorithm[J]. Transactions of the Institute of Measurement amp; Control,2014,37:164~176.
[9] 黄峰,汪岳峰,顾军,等.模糊参数自整定PID控制器的设计与仿真研究[J].光学精密工程,2004,12(2):235~239.
[10] 陈向坚,李迪,白越,等.模糊神经网络在自适应双轴运动控制系统中的应用[J].光学精密工程,2011,19(7):1643~1650.
[11] 李庆中,顾伟康,叶秀清,等.移动机器人模糊控制方法研究[J].仪器仪表学报,2002,23(5):480~483.
[12] 沈斌,刘丽丹,许伟明.基于MATLAB的模糊控制开发平台[J].仪器仪表学报,2005,26(8):814~815.
[13] 任维政,盛立峰,陈月岩.带自调整函数的模糊控制器在直流电机调速系统中的应用[J].光学精密工程,2003,11(5):537~542.
[14] 卿启新,叶汉民,杨晓武,等.基于模糊RBF神经网络的无刷直流电机调速控制[J].化工自动化及仪表,2010,37(7):84~86.
[15] 钟晓伟,宋蛰存,姜忠.模糊PID控制器在无刷直流电机控制系统中的应用[J].化工自动化及仪表,2010,37(8):87~89.
[16] 梁晨,何辉,何燕平.基于FPGA的高精度自动调速步进电机控制器[J].化工自动化及仪表,2011,38(12):1481~1484.
FuzzyPIDControlofDCTorqueMotorBasedonDSPBuilder
CAO Hong-rui1,2,ZHANG Shu-mei1, ZHANG Yan1
(1.ChangchunInstituteofOptics,FineMechanicsandPhysics,ChineseAcademyofSciences,Changchun130033,China; 2.DahengCollege,UniversityofChineseAcademyofSciences,Changchun130033,China)
To offset conventional PID controller’s insufficiency in regulating DC torque motor speed, a fuzzy PID technology was proposed, including PID control algorithm model. Having the model of PID controller built with DSP Builder and simulation analysis implemented as well as the motor speed control tested to show that this fuzzy PID controller’s performance outperforms that of conventional ones; when targets’ parameter and structure vary obviously, no obvious changes can be seen in fuzzy PID controller’s response curves and the dynamic characteristic parameters. The system stability can satisfy the design along with coincided simulation and experimental results.
fuzzy PID control, DC torque motor, motor speed control, DSP Builder, FPGA
TH865
A
1000-3932(2016)05-0462-05
2016-04-11(修改稿)
中国科学院长春光学精密机械与物理研究所重大创新专项“激光载波测控与通信技术研究”
猜你喜欢
机电工程技术(2018年10期)2018-12-06 02:26:38
制造技术与机床(2017年6期)2018-01-19 02:41:07
制造业自动化(2017年2期)2017-03-20 14:26:18
光学精密工程(2016年6期)2016-11-07 09:08:02
装备制造技术(2016年7期)2016-09-26 09:21:36
制造技术与机床(2016年3期)2016-08-31 04:02:37
电源技术(2015年9期)2015-06-05 09:36:06
组合机床与自动化加工技术(2014年12期)2014-03-01 02:22:54
上海金属(2013年4期)2013-12-20 07:57:17