电动汽车用充电器与驱动器一体化拓扑研究*
2016-11-21 01:19赵剑飞刘建波
电子器件 2016年5期
赵剑飞,薛 洋,刘建波
(上海大学机电工程与自动化学院,上海200072)
电动汽车用充电器与驱动器一体化拓扑研究*
赵剑飞*,薛洋,刘建波
(上海大学机电工程与自动化学院,上海200072)
针对电动汽车驱动与充电系统分离所带来的诸多问题,提出了一种电动汽车驱动和充电系统一体化电力电子拓扑结构及相应控制策略,该拓扑正向工作时驱动电机为电动状态、反向工作时给蓄电池充电为充电状态。一体化拓扑在充电时共用驱动系统的主电路和控制电路,无需额外增加AC/DC和DC/DC充电器,提高了功率密度、降低了产品成本、降低了系统故障率、减少了安装空间等,解决了传统电动汽车驱动与充电分离带来的问题。最后针对提出的一体化拓扑和控制策略进行了实验验证,试验中所采用电机型号为80CB050C,结果表明该一体化拓扑在充电实验时直流母线电压纹波在6.9%附近,经过Buck电路中电机绕组进一步滤波后,充电电压及电流纹波基本稳定在0.3%以内,验证了所提方法的正确性和可行性,具有一定的应用前景和实用价值。
电力电子技术;汽车电池充电;一体化拓扑
随着环境污染问题的日益严峻以及化石能源的短缺,各种新型能源及相关产业不断涌现,电动汽车作为其中代表之一,其相关技术及产业在快速发展[1-4]。电动汽车的蓄电池及其充电技术是制约其发展的重要因素,蓄电池充电技术的好坏会直接影响到其充电时间与工作寿命。电动汽车充电系统包括车载型充电系统以及独立型充电系统[5-6],两者最大区别即车载型充电系统将充电整流器安装在车上,而独立型充电系统将充电整流器放置在地面上专门充电桩上。
一般车载型充电系统包括充电变换器、蓄电池组、驱动变换器及电机,由于使用方便而被广泛采用,本文所研究即车载型充电系统。车载型充电系统大多采用多整流器拓扑结构,包括驱动电机的功率逆变器以及充电时的整流器,如图1所示,当电动汽车工作在牵引模式或者充电模式时,其相应变流器工作而对应变流器停运,即充电整流变换器和驱动逆变器不同时运行;这就使得充电系统中的大电感和大电容数量等级较高,造成了车载型充电系统普遍存在成本高、体积大、功率密度等级低等问题,在此背景下,驱动、充电一体化结构被广泛研究[7,8],一体化拓扑通过利用驱动系统中原有的主电路及控制电路来重构充电系统,不需要增加额外的拓扑电路及功率器件,不仅会对电动汽车成本及车内空间有巨大节省,同时也降低了汽车工作时的故障率,一体化拓扑结构如图2所示,本文在双轮驱动电动汽车的驱动系统硬件拓扑上,将原驱动系统重构为驱动、充电一体化拓扑电路,并针对此拓扑电路提出相应控制策略。
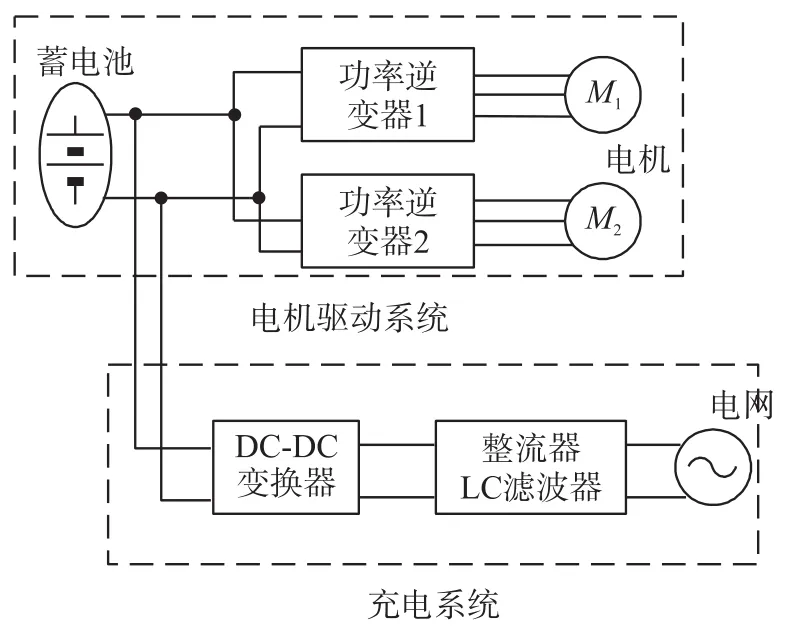
图1 电动汽车驱动与充电常规拓扑结构
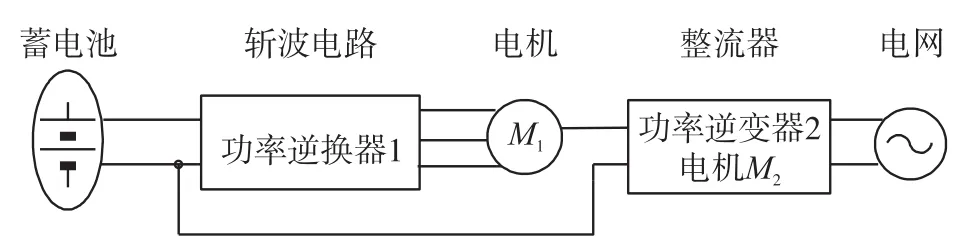
图2 驱动与充电一体化拓扑结构
1 主拓扑电路
本文所提出的驱动、充电一体化拓扑结构如图3所示,该拓扑在原有双轮驱动系统的基础上,就可将原有驱动系统改变为兼顾充电功能的双工作模式拓扑,同时控制电路结构也无需改变。
当工作在驱动模式时,开关K1往1口闭合,K2打开,蓄电池Udc通过逆变器1和2分别向两个驱动电机M1、M2供电,通过合适的控制策略,控制逆变器开关管的导通组合,将蓄电池直流电变换成驱动电机所需的交流电,该工作模式即为经典的三相全桥驱动模式。
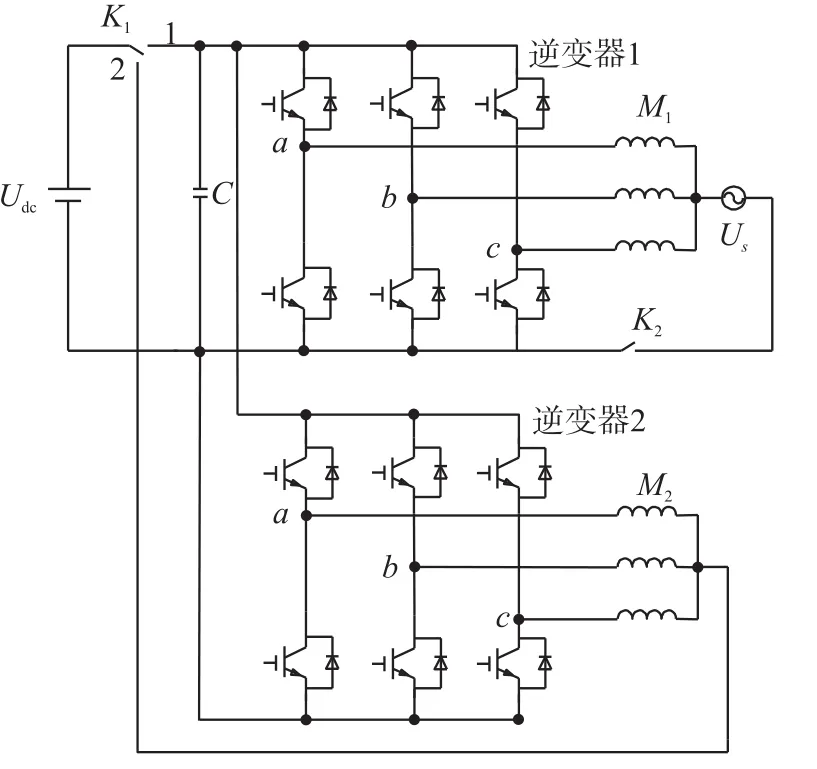
图3 一体化拓扑结构
当该系统工作在充电模式时,需要提前停止电机驱动,首先将开关K1从1口分离,然后闭合充电开关K2,并将K1向2口闭合,此时,该一体化拓扑等效为不控整流电路串联三相交错并联Buck斩波电路,如图4所示(图4中Buck电路简画出一相)。充电工作时,交流电源Us首先通过逆变器1的二极管不控整流成直流源Uc,电机M1绕组起到滤波作用,通过逆变器2与电机M2绕组构成的三相交错并联Buck斩波电路将Uc调压为充电所需电压。同时,三相并联电路在消除电流纹波以及通流的能力等级上较单相电路均有巨大提升。在充电模式时,电机绕组中的流过的电流相同,所以不存在电磁转矩。这样在原有驱动系统的基础上,就重构了车载充电系统,降低了产品成本,提高了器件使用效率。

图4 充电模式等效电路
2 充电模式时各工作模态及控制策略
充电模式时等效拓扑结构如图4所示,充电时,交流源Us首先经过不控整流成直流源Uc,并向电容C充电,电容C在此起到稳压作用,然后直流源Uc通过三相交错并联[9-10]的Buck电路降压成所需充电电压Udc,其中三相交错并联Buck电路如图5所示,电机M2三相电感绕组上电流分别为ia、ib、ic,三相电感绕组上电压分别为ua、ub、uc,假设:各相绕组自感值相同均为L,各相绕组之间的互感值均为M,各元器件均为理想元器件。
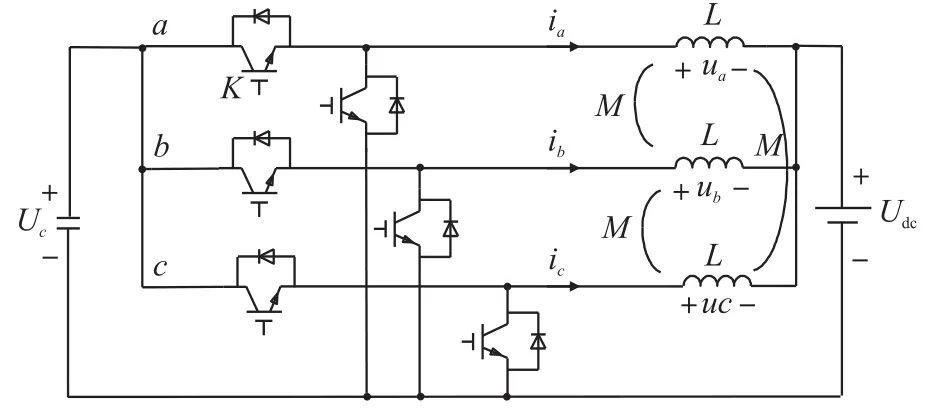
图5 三相交错并联Buck电路
在充电模式时,该三相交错并联的Buck电路共有6种工作模态,各工作模态及各模态下电感电流变化情况如图6所示。

图6 各工作模态时相电流
式中,L2=2M+L为该模态下等效电感。
模态3:
在该模态中,ua=uc=-Udc,ub=Uc-Udc,将各相绕组电压值代入式(1)求解可得:
其中各相绕组的电压方程如式(1)所示:

模态1:
如图6所示,在该模态中,a相Buck电路的开关管K导通,直流母线电压Uc向蓄电池充电,此时a相电感电压ua的值为Uc-Udc,ub、uc的值均为-Udc,电感绕组上电流线性增加,将ua、ub、uc的值代入式(1)求解方程组可得:

模态2:
该模态处于各Buck电路换相导通之间,各相可控开关管均未导通,此时ua、ub、uc的值均为-Udc,代入方程组(1)求解可得:

由以上分析可知,在一个周期的各工作模态中,各相电感绕组之间实现了解耦,同时若直流母线电容C足够大,则直流母线电压和蓄电池电压也可以实现解耦[11-12]。因此,在充电模式时,可以通过控制Buck降压斩波电路的占空比D来控制蓄电池充电电压Udc。本文采用电感电流瞬时控制原理,并结合电压环构成优化的双闭环控制策略;即当Buck电路开关管通断时,根据电机绕组上电流瞬时变换情况来调节占空比D的变化,并加入电压环来增加系统稳定性。其中Buck电路中开关K通断时,电感L上的电流变化如图6所示,当开关K导通时,电感L上电流增加,根据电感电压、电流关系可以得到:

当开关K关断时,可得:

式中,Ton与Toff分别为开关K的通断时间,开关周期T=Ton+Toff,将式(5)与式(6)相加,整理后可得:
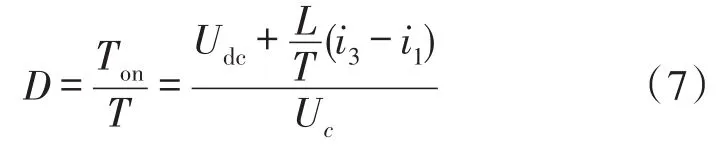
为了增加控制的响应能力以及稳定性,加入电压环进行控制,将蓄电池的给定值Udc∗与测量值的差值经PI调节后代替式中的测量值,此时,i3作为电流的指令值i∗,i1则为检测值,则占空比D的表达式为:

由于该拓扑工作在充电模式时所需的控制主电路在原来驱动主电路基础上可以完全满足,不需额外增加控制电路,实际控制时简单、方便。
3 实验结果
基于以上所提双轮驱动、充电一体化拓扑及控制策略,本文进行了实验验证,实验电路框图如图7所示,交流源Us经不控整流为直流母线电压UC,通过交错并联的Buck电路降压为所需充电电压。在Buck电路工作时,采样电路所采样的蓄电池实际充电电压与电流经过A/D转换后反馈给DSP控制电路,将给定充电电压、电流值与采样反馈得到实际值经过双闭环控制后,输出PWM驱动信号给各Buck电路开关管Ki,通过控制开关管Ki的通断最终控制充电电压Udc。试验中使用的两个电机的型号为80CB050C,DSP控制系统芯片为TMS320F28335,PWM输出信号的驱动模块采用EXP841。
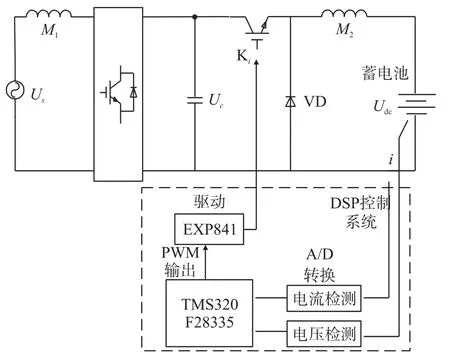
图7 实验电路框图
具体实验参数如表1所示。
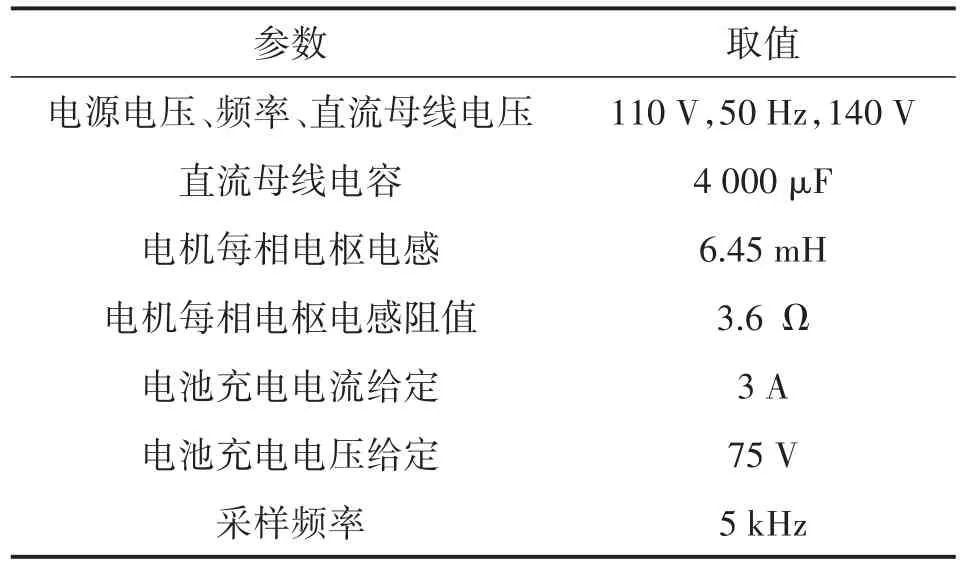
表1 系统参数
图8所示为不控整流后的直流母线电压UC,从实验波形可以看出,直流母线电压在140 V附件,并且具有一定的纹波,纹波约为6.9%,在可接受范围内;这是因为整流时采用的是二极管不控整流,同时电机绕组电感也不够大。在实际情况中,若纹波大小在允许范围外,则需要考虑在直流侧额外增加直流滤波电感。
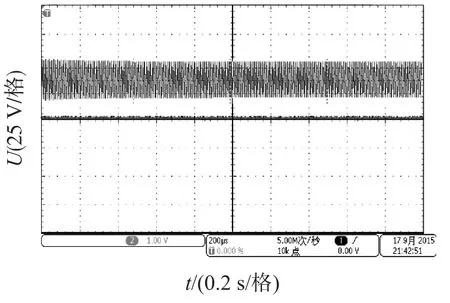
图8 直流母线电压实验波形
图9所示为蓄电池充电电压以及电流波形,从实验波形可以看出,充电电压、电流可以迅速稳定到给定充电电压,并且经过二号电机绕组电感的进一步滤波,充电电压、电流纹波都较小,纹波都在0.3%以内,说明本文所提拓扑电路及控制策略可行。
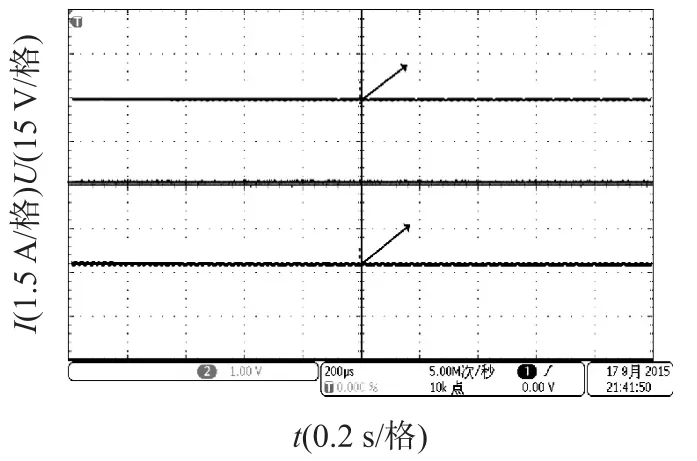
图9 充电电压电流实验波形
4 小结
通过利用电动汽车已有驱动系统的主电路及控制电路来重构其充电、驱动一体化系统,该拓扑正向工作时驱动电机运转,反向工作时给蓄电池充电;无需增加额外功率拓扑电路,解决了传统电动汽车驱动与充电分离带来的各种问题,具有一定的使用价值。
(1)针对传统电动汽车驱动、充电分离的情况,提出新型驱动、充电一体化拓扑,该一体化拓扑在原有驱动系统基础上重构了充电系统,同时无需增加额外器件。
(2)针对本文所提出的新型驱动、充电一体化拓扑给出一种优化电压、电流双闭环控制策略。
(3)最后对本文所提一体化拓扑及控制策略进行了实验验证,实验表明,充电电压、电流纹波都在0.3%以内,充电效果较好,证明了本文所提方法的可行性。
综上所述,本文提出的一体化拓扑和控制策略进具有一定的应用性和实用性。
[1]Jung D,JI Y,Won C,et al.Grid-Connected Electric Vehicles Charger Station Based on Lithium Polymer Battery Energy Storage System[C]//IEEE 2010 Vehicle Power and Propulsion Conference(VPPC).Lille,France:IEEE,2010:1-5.
[2]Egan G,Sullivan,Hayes G,et al.Power-Factor-Corrected Single-Stage Inductive Charger for Electric Vehicle Batteries[J].IEEE Transactions on Industrial Electronics,2007,54(2):1217-1226.
[3]郭建龙,文福拴.电动汽车充电对电力系统的影响及其对策[J].电力自动化设备,2015,35(6):1-7. Guo Jianlong,Wen Fushuan.High-Efficient Battery Charging System Based on Current-Source PWM Rectifiers[J].Electric Power Automation Equipment,2015,35(6):1-7.
[4]任玉珑,史乐峰,张谦,等.电动汽车充电站最优分布和规模研究[J].电力系统自动化,2011,35(14):53-57. RenYulong,Shi Lefeng,Zhang Qian,et al.Optimal Distribution and Scale of Charging Stations for Electric Vehicles[J].Automation of Electric Power Systems,2011,35(14):53-57.
[5]段朝伟,徐海刚.电动汽车电池智能充电系统设计与实现[J].电子器件,2013,36(2):256-259. Duan Chaowei,Xu Haigang.Design and Implementation of Electric Car Battery Intelligent Charging System[J].Chinese Journal of Electron Devices,2013,36(2):256-259.
[6]Lacressonniere F,Cassoret B.Converter Used as a Battery Charger and a Motor Speed Controller in an Industrial Truck[C]//2005 European Conference on Power Electronics andApplications. Dresden,Germany:IEEE,2005:1-7.
[7]Gilanmatio P,Eric A,Paolo G.Integrated Battery Charger for Electric Scooter[C]//13th European Conference on Power Electronics and Applications(EPE'09).Barcelona,Spain:IEEE,2009:1-7.
[8]Lacroix S,Hilairet M,Laboure E.Design of a Batterycharger Controller for Electric Vehicle Based on RST Ontroller[C]//IEEE 2011 Vehicle Power and Propulsion Conference.Chicago,IL,USA:IEEE,2011:1-6.
[9]卢增艺,陈为.多通道交错并联反激变换器磁集成技术研究[J].中国电机工程学报,2009,29(18):41-46. Lu Zengyi,Chen Wei.Research on Magnetic Integration of Multi-Phase Interleaving Flyback Converter[J].Proceedings of the CSEE,2009,29(18):41-46.
[10]汪东,赵一,石健将,等.具有开关电容的隔离型交错并联Boost变换器[J].中国电机工程学报,2009,29(21):14-20. Wang Dong,Zhao Yi,Shi Jianjiang,et al.Interleaved and Isolated Boost Converters with Switched Capacitors[J].Proceedings of the CSEE,2009,29(21):14-20.
[11]Li Wuhua,He Xiangning.A Family of Isolated Interleaved Boost and Buck Converters with Winding-Cross-Coupled Inductors[J]. IEEE Transactions on Power Electronics,2008,23(6):3164-3173.
[12]封焯文,粟梅,孙尧,等.用于电动汽车的双向交错式DC/DC变换器的设计[J].电力电子技术,2010,44(9):16-17. Feng Zhuowen,Su Mei,Sun Yao,et al.A Bidirectional Interleaved DC/DC Converter for Electric Vehicleapplications[J].Power Electronics,2010,44(9):16-17.

赵剑飞(1977-),男,博士,辽宁人,上海大学,讲师,研究方向为新能源发电、微网,jeanff@126.com。
Research on the Integration of Charger and Driver for Electric Vehicle*
ZHAO Jianfei*,XUE Yang,LIU Jianbo
(School of Mechatronics Engineering and Automation,Shanghai University,Shanghai200072,China)
In order to solve problems caused by the separation of electric vehicle driving and charging system,an integrated power electronic topology and control strategy for electric vehicle driving and charging system are proposed,this system works as an electrical drive mode under normal operation and a battery charging mode under reverse operation.The integrated topology sharing the main circuit and control circuit of the driving system,without additional AC/DC and DC/DC charger,improving power density,reducing product cost,reducing the system failure rate,reducing the installation space,and solving the problems caused by the separation of the driving and charging of the traditional electric vehicle.In the end,the integrated topology and control strategy is verified,the motor model used in the experiment is 80CB050C,the results show that the DC link voltage ripple is around 6.9%in the charging experiment,after the further filtered through themotor winding in Buck circuit,the charging voltage and current ripple are basically stable at 0.3%,which verified that the proposed method is correct and feasible,and it has a certain application prospect and practical value.
power electronic technology;vehicle battery charging;integrated topology
U469.72
A
1005-9490(2016)05-1215-05
项目来源:上海市自然科学基金项目(13ZR1417000)
2015-11-10修改日期:2015-11-03
EEACC:1210;836010.3969/j.issn.1005-9490.2016.05.038
猜你喜欢
汽车维修与保养(2021年8期)2021-02-16
动漫星空(兴趣百科)(2019年3期)2019-03-07
通信电源技术(2018年5期)2018-08-23
通信电源技术(2018年5期)2018-08-23
电子制作(2017年1期)2017-05-17
海外星云(2016年17期)2016-12-01
照明工程学报(2016年3期)2016-06-01
电测与仪表(2016年2期)2016-04-12
电测与仪表(2016年12期)2016-04-11
河北地质(2016年4期)2016-03-20