基于反馈控制的高能效LED驱动电路设计
2016-11-21 01:19张微微
电子器件 2016年5期
张微微
(江苏开放大学教务处,南京210019)
基于反馈控制的高能效LED驱动电路设计
张微微*
(江苏开放大学教务处,南京210019)
为提高可调光发光二极管(LED)的灵活性和能量效率,提出了一种基于反馈控制的LED驱动器。该驱动电路采用了自适应电压调节技术,使线性电流调节器的功率损耗降到了最低。并设计了相应的基于电阻数字模拟转换器的数字控制机制,可用于馈送dc-dc转换器的模拟反馈输入。实验结果显示,提出的数字控制方法灵活性和稳定性较高,且能够有效控制调节速度。当输入电压为26 V时,LED驱动器能够提供较宽的5 V~40 V输出电压范围,获得了较大的灵活性。在输出电流为680 mA时,稳定状态下的精确度超过97.7%,频率为1 kHz且最短的接通持续时间为4 μs,系统的峰值效率达94.1%。
发光二极管驱动器;反馈控制;脉冲宽度调制调光;能量效率
发光二极管(LED)在显示照明、交通信号灯、汽车制造行业等各领域越来越受到欢迎[1-2],其主要优点是能效高、使用寿命较长,且不含有毒成分[3-4]。由于LED的应用越来越广泛,使得设计高能效的驱动电路显得尤为重要。通过调光可以减少灯具的能耗,增效节能,因此就室内照明而言,驱动器的设计方案应同时提供调光功能。众所周知,控制LED亮度的常用办法是通过振幅调制或脉冲宽度调制(PWM)调整LED的正向电流,原因在于光通量几乎是与LED电流成正比关系[5],因此此项技术的关键是优化电流的PWM控制技术。
目前,许多学者提出了多种降低损耗的方法和优化驱动器拓扑结构来获得最大效率[6-8]。常用方法是通过采用DC-DC转换器使线性电流调节器的电压降到最小。结果表明,栅源电压(VGS)或者漏极电位(VD)均可作为反馈控制信号用于电压调节回路。参考文献[9]提出将单端初级电感转换器(SEPIC)用于电源和电压控制的策略,转换器上附有多个带有PWM调光功能的并联电流调节器。
本文提出了一种基于反馈控制的LED驱动器设计方案,将不同LED通道上功率MOSFET的最大VGS作为电压调节回路的控制变量,并且将模拟反馈直接用于PWM。出于效率的考虑,将电流调节器的功率MOSFET保持在线性区域内非常重要。实际上,这对调制器增益提出了较高的要求,为了获取较高效率,调制器增益必须非常低。然而,增益非常低的离散调制器是不切实际的[9]。参考文献[3]采用了相似的理念,即:使用SEPIC和多个并行LED串以及PWM开关的线性电流调节器。模拟反馈控制可用于自适应电压调节,其中包括两个运算放大器及多个电阻器。使用并行LED串漏极电位的最小值来控制反馈回路。
提出的可调光LED驱动器带有数字自适应电压调节,且输出电压范围非常广。在电压控制回路中使用了电阻式数字模拟转换器(DAC)结构,此结构为降压升压转换器的反馈提供了模拟反馈信号。对提出的系统进行了性能评估,并进行了硬件实现。实验结果显示,提出的数字控制方法灵活性和稳定性较高,且驱动电路满足了高能效和高电流精确度的要求。
1 提出的基于反馈控制的LED驱动器
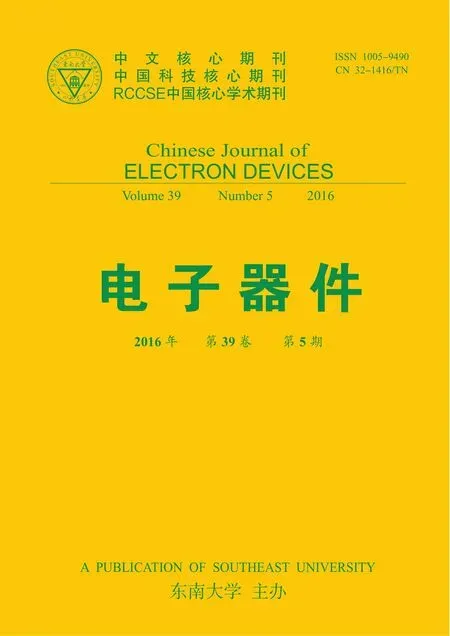
图1显示了提出的可调光LED驱动器的结构,此结构包括3个主要功能模块:用于电源控制的降压升压转换器、用于亮度控制的PWM开关线性电流调节器以及用于自适应电压调节的带有电阻式DAC的反馈控制,数字反馈控制可用于自适应电压调节。
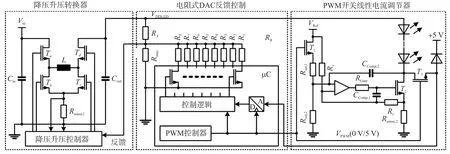
图1 提出的带有数字反馈控制的可调光LED驱动器结构示意图
从图1可看出,降压升压转换器与单个LED串连接起来。实际上,通过使用多个模拟数字转换器通道及微控制器(μC)的PWM输出,可将本文提出的设计理念延伸至多个并行的LED串[10]。
尽管如此,本文的重点仍在于具有一个通道的LED驱动器,以证实研发的数字自适应电压调节的功能,并在效率及回路稳定性方面对系统性能做出评估。总体目标是:在保证稳定运行的情况下,实现较宽的输出电压范围以获得最大的灵活性。与文献[5,9]提出的方法相似之处在于,应确保电流调节器上的电压降VD最小,以便大大降低了效率,原因在于其控制着静态损耗。提出的自适应电压调节将晶体管T2的漏极电位VD当作反馈控制变量。下文会介绍上面提及的主要系统部件,并且突出强调每个模块的重要方面及注意事项。
2 功能模块设计
实现较宽的输出电压范围,可以获取最大的设计灵活性[2]。因此,需要选取降压升压转换器来实现本文提出的驱动器。转换器的输出电压通常为26 V,直接供给LED。选取的降压升压控制器可以处理38 V的输入电压[4]。限制最大输出电流及最大可用功率的是晶体管Ta-Td、感应器L=68 μH、检测电阻Rsense,1等外部部件。应注意:使用的功率转换器受PWM控制,并且在固定的频率下运行。正如本文稍后所讲,降压升压转换器的输出电压由RA和RB的电阻式分压器进行设置,其中RB的数值由电阻式DAC确定。
设置 LED电流为 ILED=680 mA,工作频率为400 kHz,以便实现较宽的输出电压范围。假设每个LED的正向电压为VF≤3.6 V,连续驱动10个LED是可能实现的。由于LED是电流控制型设备,必须非常精确地调节和调整LED电流的绝对电平。在模拟调光的情况下,这会变得非常明显,原因在于感知亮度几乎与LED正向电流成正比。实际上,在PWM调光的情况下,精确的电流控制同样重要,可以使色移降到最低。因此,电流调节器必须补偿LED电源电压VDD,LED的变化或LED正向电压VF的变化,变化可能由温度波动引起。提出的设计考虑了包括降压升压转换器的电压纹波及负载变化造成的电压骤降。因此,设计要素必须包括的一定的电流调节器压降安全余量。为了使余量最小,希望能够实现转换器的低压纹波及负载瞬变的小幅降落,以便提高效率。
此外,为了获得较高PWM频率和较宽调光范围,要求接通和断开时间非常短。提出的设计利用了线性电流调节器的典型结构,如图1所示。为了使接通和断开时间非常短,选取了门容量低的MOSFET及高速运算放大器。电流调节器的最短PWM接通持续时间确定了最小亮度。提出的驱动器可实现的最短接通持续时间为 tPWM,on,min=4 μs。PWM调光频率设置为1 kHz,因此,最小的占空比为0.4%。PWM分辨率为16 bit。
通过脉冲调节基准电压Vref实现了PWM调光。当T1不导电时(VPWM=0),电阻器Rset,2会将PWM输入拉低,目标电流设置为零。从图1可看出,添加较小电阻Ry和较大上拉电阻Rx可以校正OP的输入偏移电压,较小电阻Ry嵌入在反馈路径,较大上拉电阻Rx可以提升负输入。为了避免出现过冲和振荡,需要电容器Ccomp,1和Ccomp,2进行补偿。
3 提出的电阻式DAC反馈控制方法
由图1和图2中RA和RB的电阻式分压器对降压升压转换器的输出电压VDD,LED进行设置。为了实现自适应电压调节,可通过数字控制字bDAC调整电阻RB。图2是反馈控制回路。如果电源电压VDD,LED上升,漏极电位VD也会增加。数字控制会削减控制字bDAC,电阻RB也会较大。所以,VDD,LED会再次下降。实际上,可将电流源VD的下降减到最低,电流源VD是主要的控制参数。
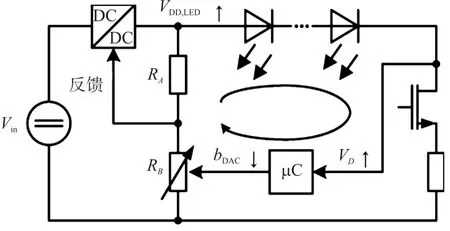
图2 使用了电阻式DAC的数字反馈控制回路
在本文提出的实施方案中,为电阻式DAC选择的分辨率为NDAC=8 bit。可看出,电阻R1~R8必须具有二进制加权值,并且:

可根据下列等式计算出DAC的总电阻RB。
其中,bDAC是0~(2NDAC-1)范围内的二进制输入值。此关系式表明VDD,LED依赖于二进制控制字码bDAC。因此,代入给定的bDAC值,可根据下列等式计算出降压升压转换器的输出电压VDD,LED。

选取的降压升压转换器将反馈针的电压VFB调至0.8 V。与数控电阻R1~R8并行的电阻器Rmax设置了最小电阻 RB,并且与 RA一起确定了最小的VDD,LED。应注意:电阻式分压器仅能够降低反馈电阻RB,因此,可以为VDD,LED设置较高的理想值。所以,8 bit电阻式DAC的分辨率连同为R1挑选的数值会对最大的输出电压进行分配。
在VDD,LED,min=5 V到VDD,LED,max=40 V的较宽调整范围内,代入选取的数值,可逐步将VDD,LED变为Vstep= 143.75 mV。需注意:bDAC局限于某一数值,该数值与低于降压升压控制器最大额定值38 V的输出电压相对应。如果将DAC值设置得过高,可能会对降压升压控制器造成损坏。由于晶体管T2的漏极电位VD被当作反馈控制变量,当LED电流稳定时,PWM周期开始不久之后时间固定点上的微控制器会检测到此漏极电位。显然,预测量延迟必须短于电流调节器的最短接通持续时间。
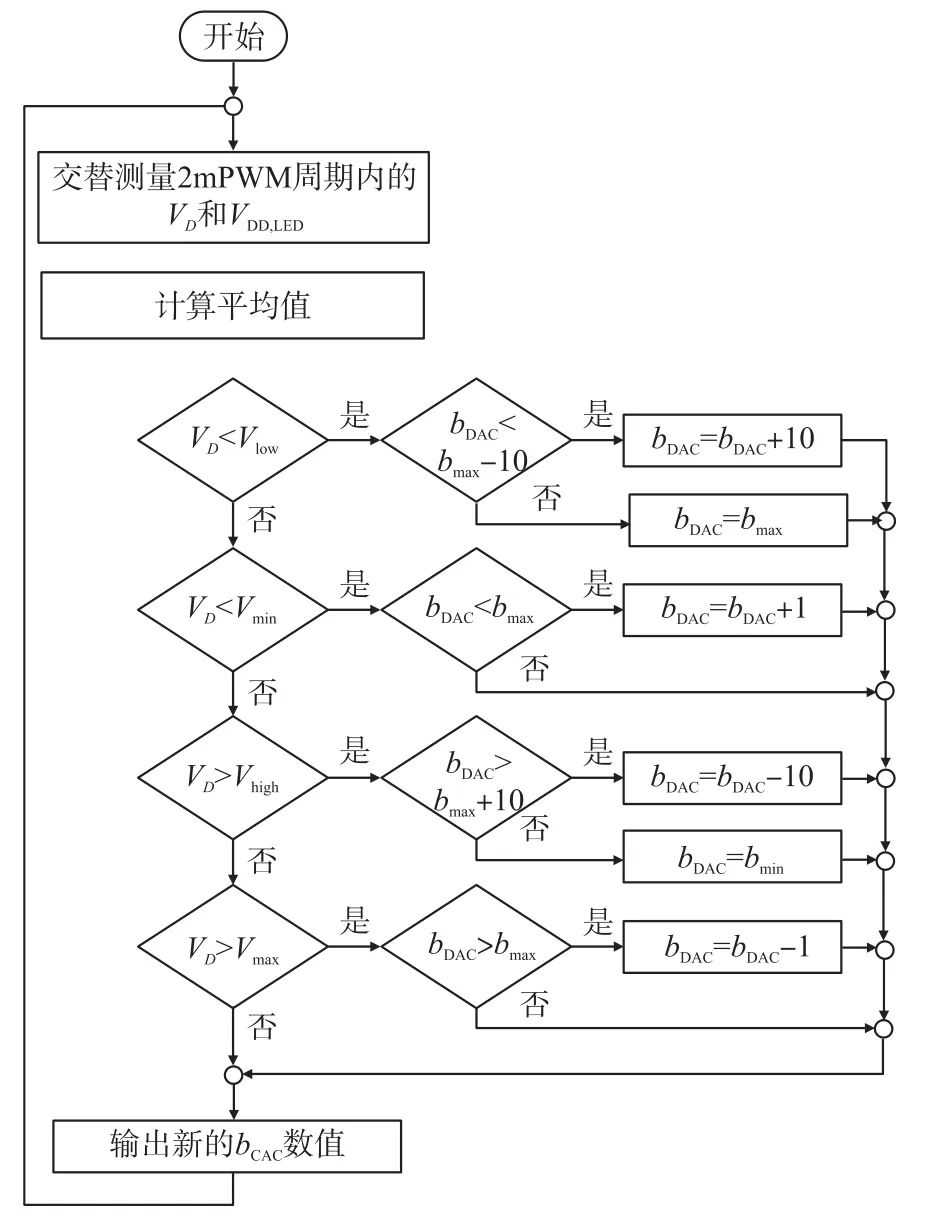
图3 数字自适应电压调节的流程图
图3是数字自适应电压控制法。交替对输出电压VDD,LED和漏极电位VD进行测量。在m测量之后,对记录的电压等级平均值进行计算和评估。求取多个周期内VD的平均值不仅可以获得更加精确的漏极电位值,而且也可以确定电压控制回路的调节速度。实际上,调整平均周期数会使控制回路中的延迟不同,所以,也就保证了回路的稳定性。
由于本文提出的系统包括3个不同的控制回路,即:电流调节、降压升压控制及自适应电压调节,需保证回路与回路之间不会形成干扰。与其它两个速度快的控制回路形成对比,极力降低自适应电压调节的速度可以确保所需的解耦。通过控制平均周期数会实现对调节速度的精确定时控制。随后,将VD,mean与多个阈值进行比较。在本文提出的实施方案中,希望漏极电位保持在VD,min=400 mV与VD,max=55 0 mV≥VD,min+Vstep之间,原因在于电流调节器需要至少400 mV的余量对电源电压或LED正向电压的波动作出反应。通过增加电阻式DAC的分辨率可使窗口最小化。
如果实测漏极电位的较大偏差超过Vhigh=2 V或低于Vlow=0.1 V,步长会增加至10,这样会提升电压变化较大情况下的调节速度,尤其是在大量LED通电的情况下。电阻R1~R8的公差不会对自适应电压调节的性能产生影响,原因在于会对VD进行连续测量,且会对任何偏差误差进行补偿。即使DAC因某些点上的公差变成非单调,控制回路仍会保持稳定。bDAC的新值会直接正向馈送至电阻式DAC,会相应地切换电阻器。数字控制算法会提供最大的灵活性,原因在于该算法允许确定bDAC的最大值和最小值。其中bDAC,min设置为零,bDAC,max设置为200,与最大电压32.3 V相对应。
4 实验结果
为了评估提出的LED驱动器和其控制方法的性能,进行了实际电路测试。图4是制作的测试板。从中可看出,该测试板包括多个连接器,用于测量各自模块的电流和电压。这样就可能会测量包括所有部件功率损耗在内的系统效率,包括微控制器和开关电源。
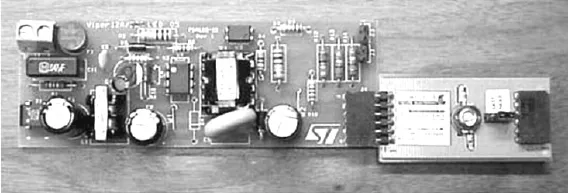
图4 测试板照片
4.1降压升压转换器性能
实际上,提出的LED驱动器实现的宽输出电压范围会影响转换器的效率η。图5是恒定输出电流为680 mA时降压升压转换器在输入电压为12和26 V条件下的效率曲线。
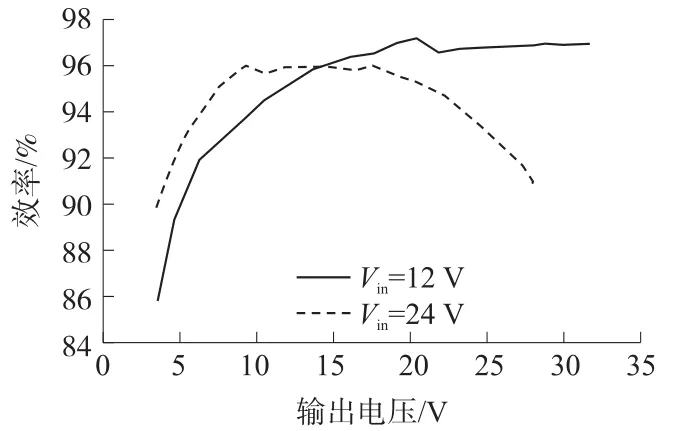
图5 降压升压转换器的实测效率
如图5所示在整个输出电压的范围内,均实现了较高的效率。出于安全考虑,绘制曲线时最大电压仅为32.3 V。由于最大值为bDAC,max=200,才设定了此限制。从中可看出,全部输出电压未达到Vin=12 V,原因在于输入电流受到了Rsense,1的限制(见图1),Rsense,1在26 V条件下运行。在下列测量中,Vin固定为26 V。降压升压控制器IC在400 kHz的固定工作频率下运行,考虑到效率,由额外的5 V电源提供。
4.2电流调节器性能
开关电源的输出会影响电流调节器的性能,例如,通过固有电压纹波或因负载瞬变引起的电压骤降。图6和图7是LED电流ILED的平均和单次测量结果,用以获得6个LED中的最小PWM占空比。除了4个时间点上的噪声畸变不同以外,两条曲线几乎一样。高频噪声来自降压升压级的电源开关。
进一步观测得出,就PWM调光频率而言,转换器晶体管会在任意的时间间隔内切换。因此,在平均电流中无法看见噪声感应。实际上,在室内照明中,高频噪声会变得不相干,原因在于人类的眼睛也会平均分配感受到的亮度,无法发现电流中的波动。此外,在稳定性、稳健性、精确度或安全工作区方面,开关噪声不会对电流调节器或LED构成威胁。如此看来,较短的接通和断开时间是可以实现的。电流需要大约2 μs来稳定在理想的水平上,然而,几乎瞬间就会断开。在稳态条件下,测量到的LED电流为ILED≈708 mA,与标称值的偏差低于1.09%。为了确定测量LED电流方差,需要进行额外的测量。首先,图8是LED电流及电源电压的实测分布图。在这种情况下,如果电压偏差会影响LED电流,这种影响就会显而易见。我们清楚地认识到:电压纹波远低于10 mV,可忽略不记。然而,正如所料,开关电源的高频峰值会对电流造成影响。在非常短的时间间隔内观测到的电流峰值多达50 mA。如上所述,这些峰值不会对电流调节器的性能造成显著影响。其次,图9是实测LED电流与标称值偏差的百分比。从中可看出,偏差低于1.09%。因此,电流的精确度至少为97.7%。
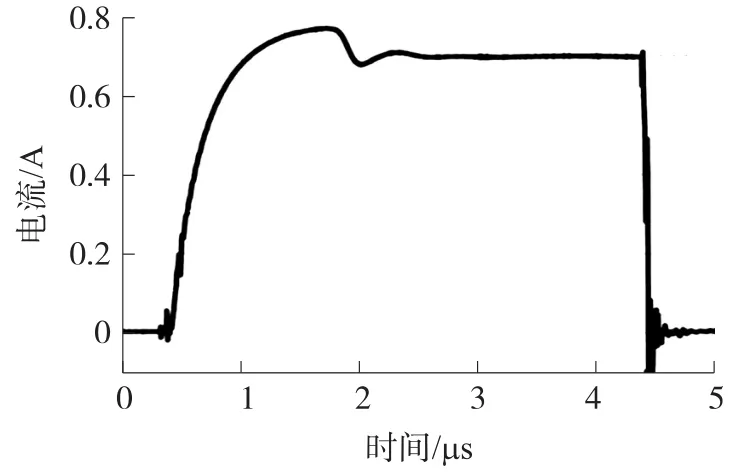
图6 LED平均电流ILED的测量结果
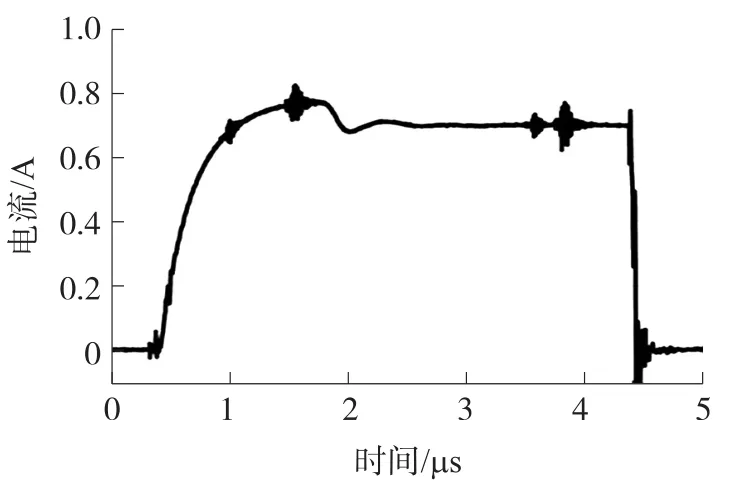
图7LED电流的单次测量结果
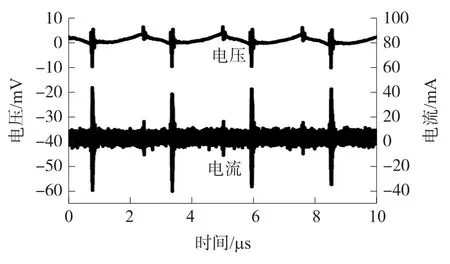
图8 一段时间内LED电流ILED及电源电压VDD,LED的实测分布图
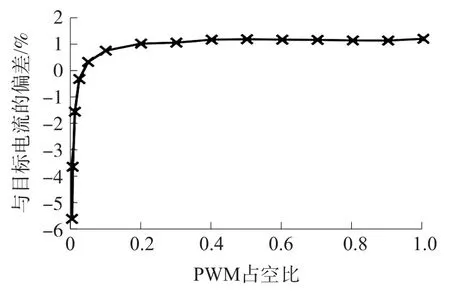
图9 根据调光水平得出的有关标称值的ILED实测电流精确度
4.3自适应电压调节性能
图10~图12是提出的带有数字自适应电压调节系统的控制状态。
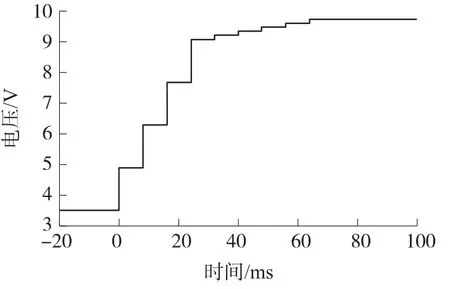
图10 提出的数字控制法后在启动阶段VDD,LED的实测自适应电压调节。
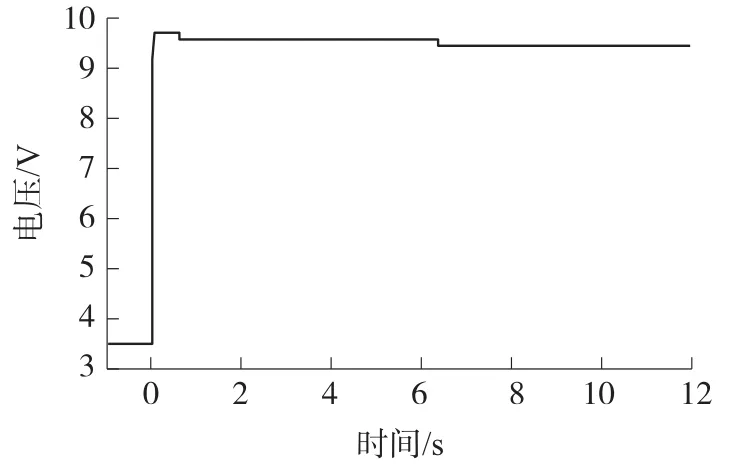
图11 VDD,LED的实测自适应电压调节。
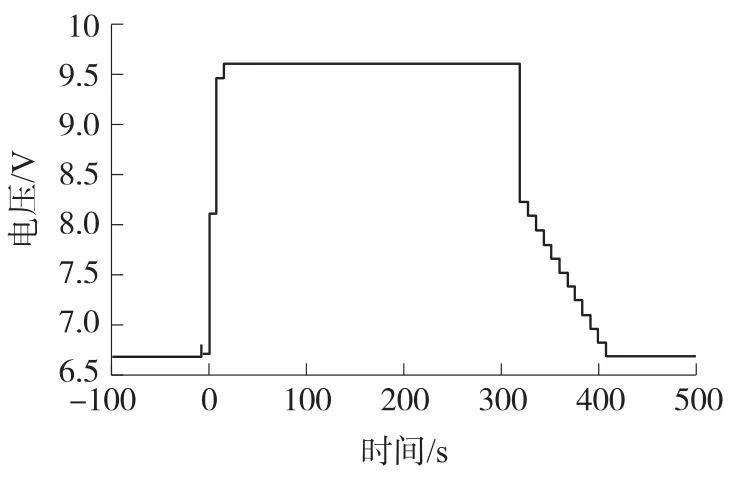
图12 VDD,LED的实测自适应电压调节
在所有情况下,3个LED均被当作降压升压转换器的负载,原因在于:LED的数量越少,越能更好地观察调节过程。在一段时间内对输出电压VDD,LED进行测量,却会连续不断地接通LED(PWM占空比为100%)。通过研究LED驱动器的启动行为,可看出调节机制运行良好、迅速且稳定。越接近目标电压,自适应电压控制器的步长就会从十减少到一,使调整更加精确。在提出的实验测试中,根据为电阻式DAC选取的数值,步长Vstep=143.75 mV。
图11中,对更长时间内的调节行为进行了测量。从中可看出,一段时间之后电压会下降,LED的热传输会导致正向电压下降。显然,数字自适应电压调节会对此效应进行补偿,并且会相应地调整VDD,LED。考虑到能量效率,此特性十分重要,因为功率损耗可以降到最低。曲线图表明电源电压在大约6.5 s后减少了两个电压级。实际上,节约的功率大约为:

当总功耗为Ptotal=6.86 W时,如果未进行补偿,效率会降低3%。图12说明系统对电压跳变的反应相对迅速且稳定。仅使用两个LED操作系统,直到时间点显示为0 ms为止。然后,在某一时间内打开第3个LED的旁路开关,且在几百毫秒之后会再次进行。此实验的目的在于模拟LED的短路故障。由于自适应电压调节非常迅速且稳定,如果LED发生故障,就可以避免电流调节器出现过热、故障或使用寿命减少等问题。
5 性能对比分析
对于效率测量结果,考虑到了提出的带有自适应电压调节LED驱动器的所有零件,如图1所示。测量结果如图13所示。

图13 包含LED驱动器、微控制器及开关电源在内的整个控制系统的实测效率。
在所有情况下,根据PWM占空比,对多个LED配置的效率进行测量。从中可看出,在非常广的调光范围和不同的LED组件内获取了非常高的能量效率。当占空比为92%时,峰值效率达η=94.1%。
提出的LED驱动器与其他类似文献的性能比较结果,如表1所示。前两种方法[5,9]同样也使用了自适应电压调节,然而,其它系统只限于单个dc-dc转换器。可看出,在控制速度、精密度、稳定性及输出电压范围方面,本文提出的数字控制法均表现良好,并提供了额外的灵活性。由于基准参考是传统的dc-dc转换器,相较于本文提出的LED驱动器,它们效率更高,但电流精确度却更差。尽管[10]调研工作中的效率略胜一筹,DC的平均电流精确度比本文提出的系统几乎差1%。此外,参考文献[10]中LED驱动器的电流纹波非常高。然而,电流精确度及纹波是LED照明系统的重要质量度量。

表1 不同LED驱动器的性能比较
6 结论
本文提出一种基于电阻式DAC反馈控制的高效LED驱动器,可用于自适应电压调节。提出的数字控制法能够实现实现较大的灵活性,原因在于此方法能够精确地定时控制调节速度及回路的稳定性。测试结果表明,当PWM占空比为92%时,通过驱动6个大功率LED,包括微控制器和降压升压控制器电流损耗在内的整个系统峰值效率为94.1%。当频率为1 kHz且最短接通持续时间为4 μs时,可实现PWM调光。在较大的调光范围内,当LED标称电流为ILED=680 mA时,LED电流的精确度大于97.7%。由于输出电压范围较宽即5 V~40 V,使用的LED驱动器可灵活应用于各种照明设备。
[1]Steranka F M,Bhat J,Collins D,et al.High Power LEDs-Technology Status and Market Applications[J].Physica Status Solidi,2002,194(2):380-388.
[2]Syed-Khaja A,Franke J.Design and Solder Process Optimization in MID Technology for High Power Applications[J].Advanced Materials Research,2014,1038:107-112.
[3]Chiu H J,Lo Y K,Chen J T,et al.A High-Efficiency Dimmable LED Driver for Low-Power Lighting Applications[J].IEEE Transactions on Industrial Electronics,2010,57(2):735-743.
[4]田立东,周继军,秦会斌.PWM调光LED驱动器设计[J].机电工程,2012(4):465-468.
[5]徐根达,赵合昌.一种高效大功率LED驱动电源设计[J].电源技术,2011(7):811-813.
[6]Felgner F,Exel L,Nesarajah M,et al.Component-Oriented Modeling of Thermoelectric Devices for Energy System Design[J].IEEE Transactions on Industrial Electronics,2014,61(3):1301-1310.
[7]王易,徐祥柱,黎兆宏,等.一种用于LED驱动的恒流控制电路设计[J].微电子学,2012(2): -.
[8]段华栋,苏成悦,周镇,等.基于滞环跟踪控制的LED驱动电路设计[J].现代电子技术,2012(16):134-136.
[9]Hu Y,Jovanovic M.LED Driver with Self-Adaptive Drive Voltage[J].IEEE Transactions on Power Electronics,2008,23(6):3116-3125.
[10]Garcia J,Calleja A J,LóPez Rominas E,et al.Interleaved Buck Converter for Fast PWM Dimming of High-Brightness LEDs[J]. IEEE Transactions on Power Electronics,2011,26(9):2627-2636.

张微微(1982-),女,汉族,辽宁抚顺人,江苏开放大学实验师,硕士。主要研究方向为电子信息技术,计算机技术,系统开发。
The Design of Driving Circuit for High Efficiency LED Based on Feedback Control
ZHANG Weiwei*
(Teaching Affairs Office,Jiangsu Open University,Nanjing 210019,China)
In order to improve the flexibility and energy efficiency of tunable light emitting diode(LED),a LED driver based on feedback control is proposed.The driving circuit uses the adaptive voltage regulator technology,so that the power loss of the linear current regulator is reduced to a minimum.The digital control system based on digital analog converter is designed,which can be used to feed the analog feedback input of DC-DC converter.The experimental results show that the proposed method has high flexibility and stability,and can effectively control the speed of adjustment.When the input voltage is 26 V,the LED driver is able to provide a wide range of 5 V~40 V output voltage,and the greater flexibility is obtained.At the output current of 680 mA,the accuracy of the stable state is more than 97.7%,the frequency is 1 kHz and the shortest time is 4 μs,the peak efficiency of the system is 94.1%.
light emitting diode driver;feedback control;pulse width modulation dimming;energy efficiency
TN206
A
1005-9490(2016)05-1192-07
2015-10-14修改日期:2015-11-11
EEACC:4260D;126010.3969/j.issn.1005-9490.2016.05.034
猜你喜欢
北华大学学报(自然科学版)(2021年3期)2021-07-13
中国交通信息化(2020年5期)2021-01-14
电脑爱好者(2020年6期)2020-05-26
中国交通信息化(2019年4期)2019-07-13
中国交通信息化(2018年9期)2018-11-09
宇航计测技术(2018年3期)2018-09-08
电子制作(2017年17期)2017-12-18
北京航空航天大学学报(2017年5期)2017-11-23
汽车与新动力(2015年1期)2015-02-27
西安交通大学学报(2014年7期)2014-04-16