
基于车辆合作的拥塞检测机制研究
2016-11-21 09:47谭国平刘如通谭林风
电子设计工程 2016年21期
谭国平,刘如通,谭林风
(河海大学 计算机与信息学院,江苏 南京211100)
基于车辆合作的拥塞检测机制研究
谭国平,刘如通,谭林风
(河海大学 计算机与信息学院,江苏 南京211100)
针对车辆自组网中拥塞控制的难点,采用合作拥塞检测方法,并结合距离和拥塞等级的路径选择方法,提出一种基于车辆到车辆通信的简化合作拥塞检测机制。该机制不仅考虑个体车辆检测到的拥塞程度,而且考虑整个拥塞队列内所有车辆的实时状况,从而获得拥塞队列密度与长度信息,仿真表明使用该机制可对车辆拥塞进行有效地控制。其次,基于模糊数学理论,对检测到的密度值和队列长度进行了处理,提出采用换路概率推理值。利用该值,仿真表明车辆可有效避免错误的换道判断状况,从而降低车辆拥塞概率。
智能交通;车辆自组网;拥塞检测;拥塞控制
随着城市中车辆日益增多,交通拥堵和交通事故问题也越来越受到人们的关注。目前解决交通拥堵的主要方案多是采用车辆与公共设施的通信V2I(Vehicle-to-Infrastructure),但是,这种方案存在范围性和开销大的缺点。鉴于这样的局限性,逐渐发展出了基于车辆与车辆之间通信的智能交通监测手段。车辆通过与其他车辆及时的信息交流可以了解当前道路的状况,并且可以及时的把信息分享给那些不在周围的车辆。
文中受一种新颖的基于车载自组网通信的探测交通拥堵探测方法-CoTEC[1](Coperative Traffic congestion detECtion)的启发,通过简化并且改进这种方法得到Si-CoTEC。利用Si-CoTEC,车辆可以实时的评估车辆四周的密度信息,并且利用估算的密度信息和行驶速度对当前的路况进行评级。由于是利用无线车载自组网的通信方式,对于地域的要求和设施的要求并不十分苛刻,也就不存在很明显局限性。另外,合作拥塞检测就是将同一拥堵路段的不同车辆对于交通状况的估算综合在一起,得到一个更全面的交通拥堵的等级数值。这种方式可以避免因为某一辆车的探测错误而导致对于整体拥堵的过高或过低的估计。车辆通过对周围车辆密度和速度的评估,得出自身的拥塞等级。然后,把这些信息发给其余的车辆。这样,靠近拥堵路段的车辆可以根据从前方车辆得到的信息,自行选择换路避开拥堵,最后达到缓解拥堵的目的。
1 基于合作机制的车辆自组网拥塞检测
文中所采用的Si-CoTEC是一种较全面、新颖的交通探测方法。主要分为车辆自身拥塞检测和车辆合作拥塞检测两个方面。车辆自身拥塞检测就是通过计算车辆周围密度和行驶速度得到当前道路拥塞状况。车辆合作拥塞检测是利用基于车载自组网通信的方法,将不同车辆的评估结果进行汇总,得到一个综合评估结果。整个拥塞检测的过程都是依靠车辆之间消息的传输来完成的,所以先列出在车辆检测过程中所使用的消息种类,如表1。
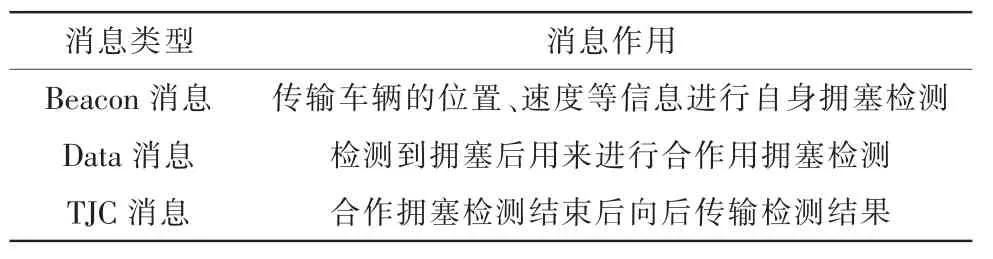
表1 车辆使用的消息类型
1.1车辆自身拥塞检测
车辆自身进行拥塞检测时主要是为了获得车辆自身周围的密度,密度的计算公式如下:

其中N表示在车辆通信范围内能检测到的其他车辆数目,Df表示能检测到的车辆中距离最远且处于检测车辆前方的车辆与检测车辆之间的距离,Db对应检测车辆后方距离最远的车辆与检测车辆之间的距离,NL则是代表当前道路上的车道数。
根据CoTEC中的划分标准将密度和速度均分为四种不同状态,划分标准如表2和3。

表2 密度划分表

表3 速度划分表
从表3中可以看出,速度划分的多个区间发生重叠现象,因此采用模糊数学理论处理拥塞判断是非常必要的[2]。为了方便对车辆检测得到的拥塞程度给出定性的分析,将拥塞程度划分为几个不同阶段并且对每个拥塞阶段给定一个具体的数值。Skycomp提出的服务等级LOS(level of service)可以将道路状态分为6种[3],它相对于公路容量计算手册HCM(Highway Capacity Manual)[4]将拥塞状态继续划分为了不同的程度。文中便是根据LOS将拥塞程度分为四个等级:自由行驶、轻微拥塞、中度拥塞和严重拥塞,对应这四个状态分别为其设定数值0、1/3、2/3、1。根据之前得出的速度和密度值的划分可以指定如下模糊规则,如表4。
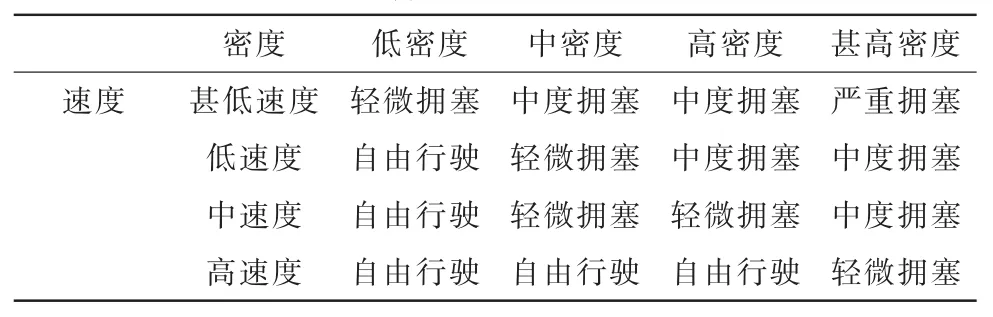
表4 计算拥塞程度的模糊规则
车辆通过接收四周车辆发送来的Beacon信息,通过消息中的位置信息估算自身四周的车辆密度。然后根据密度和速度所处的状态通过对应模糊规则自动得出车辆拥塞程度。文中采用归属度函数进行仿真计算[5],得到的结果是0到1之间的数,根据拥塞程度设定的数值便可以判断出车辆到底属于哪个拥塞程度。通过检测仿真输出的单个车辆拥塞程度的计算数值输出,若是检测到了拥塞,此时车辆便要开始考虑合作拥塞检测。车辆主要是通过发送消息来实现合作拥塞检测,但是消息的传输会带来能量的损耗,若是不分状况随意传输合作检测的消息会带来不必要的消耗,因此设定只有在检测到拥塞的情况下才允许进行合作拥塞检测。因为事先已经将拥塞程度量化为具体的数值,所以只需要设定一个阈值为Cth(本文阈值为0.2),当检测到的拥塞程度达到或者超过该阈值时便可以发出Data消息开始合作拥塞检测。
1.2车辆合作拥塞检测
合作拥塞检测是利用Data消息的多跳传递来实现的[6],具体的方法是:在传递Data消息的过程中,会收集拥堵队列中的不同车辆对于自身四周的交通拥堵等级的评估,并且,Si-CoTEC可以提供当前拥堵的特征信息——拥堵队列长度,因此,处于拥堵队列开始位置的车辆会负责周期性的产生和发送Data信息。文中将采用简化的方法选择拥堵队列中的最前端车辆:第一种是刚离开拥塞队列的最前端车辆;第二种是指完全静止的车辆且邻接表里90%的车辆处于其后方的车辆。这个简化的方法通过仿真验证可以成功的判断出最前端车辆。
当车辆接收到Data信息,先记录该消息,然后判断自身拥塞状况,当检测到拥塞时则进行合作拥塞检测。合作拥塞检测并不是将接收到的Data消息直接向后转发,而是将自身检测到的拥塞程度与Data消息中的拥塞程度结合,车辆在接收到Data消息后,会将其中的拥塞程度值与自身检测到的拥塞程度值进行平均,之后再重新写回Data消息。同时,车辆还会将自己的位置信息写入到Data消息中然后进行后续处理。之后根据坐标计算出自身与发送Data消息车辆之间的距离,这个距离用来设计转发Data消息定时器,如图1所示。
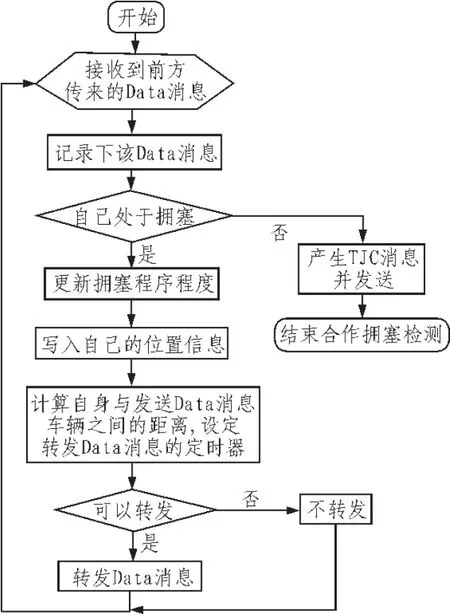
图1 Data消息处理流程图
要实现图1过程,需要采用一个竞争机制,这种竞争机制类似于CBF(Contension Based Forwarding)[7],利用车辆之间的距离远近来限制转发消息的时间。车辆在接收到Data消息时会启动一个定时器,当定时器时间结束时就可以转发Data消息。设定消息的调度时间计算方式如式(2),其中TMax表示最大的转发延时,dis则表示接收到Data消息车辆与发送Data消息车辆之间的距离,这个距离是在图1的流程中计算出来的。

为了选择拥堵队列第一辆车作为产生并且发送Data信息的车辆。文中将采用简化的方法选择拥堵队列的第一辆车:第一种是刚离开拥塞队列的最前端车辆;第二种是指完全静止的车辆且邻接表里90%的车辆处于其后方的车辆。这个简化的方法通过仿真验证可以成功的判断出刚刚离开拥堵队列的车辆,并且该车辆会负责周期性产生Data信息。
合作拥塞检测完成时,车辆会向后转发TJC消息给其余的车辆。对于同一个TJC消息,也不是所有接收到的车辆都需要转发,同样采取竞争机制,使得距离发送TJC消息最远的车辆转发该消息,通过调度设定定时器,定义方式如公式(2),此时设定的最大转发时间为TTMAX。之所以需要继续传输TJC消息是为了在仿真中通知后方车辆拥塞发生的位置是否超过岔路口,通过TJC消息,所有的车辆都可以知道前方在哪里发生了拥塞,拥塞的程度如何以及目前拥塞的队列已经有多长,这些信息可以为驾驶者选择行驶道路做出参考。
2 仿真环境
仿真是利用 SUMO(Simulation of Urban MObility)[8]、OMNeT++[9](Objective Modular Network Testbed in C++)和Veins[10]共同实现的。SUMO主要负责仿真地图以及车辆的可视化,它不仅可以直观的显示车辆在仿真地图中的行驶情况,而且可以设置车辆的行驶速度、停止的位置等一系列的参数。OMNeT++主要负责模拟车辆间的通信,例如Beacon、Data等一系列的信息。Veins是将这两个软件(SUMO和OMNeT++)连接起来的桥梁。Veins是一个由道路交通仿真和网络仿真组成的用于车辆之间通信IVC(Inter-Vehicular Communication)的开源仿真框架,它需要SUMO和OMNeT++的共同支撑。为了对车辆间通信进行评估,SUMO和OMNeT++需要平行运行,它们通过TCP socket协议进行连接。为了实现车辆间通信,该协议已经被标准化为交通控制接口 TraCI(Traffic Control Interface)。图2中MIXIM是OMNeT++中用于无线网络的通信网络仿真包,Veins在MIXIM的基础上可以在OMNeT++中对车辆节点之间的通信进行仿真。

图2 仿真平台之间的逻辑结构关系

图3 仿真采用的地图
仿真采用的地图是南京市珠江路附近的一个十字路口,如图3所示,每条道路设定四条车道,速度限制在130km/h。地图和行驶的车流的设定均在SUMO中完成,车流最大行驶速度不超过主干道限定的速度,车流中的车辆采用均匀分布的发车频率,即车辆之间的发车间隔时间是相同的。
仿真参数如表5,车辆参数的设定是参考经典案例而设,之所以将Tout设定为3 s是考虑到Beacon消息传输过程中因为延时等原因最晚3 s才能够到达。其中SendBeaconEvt、SendDataEvt、CalculateDensity、outBeacon分别表示周期发送Beacon消息、周期发送Data消息、周期计算车辆密度、处理过时Beacon消息。
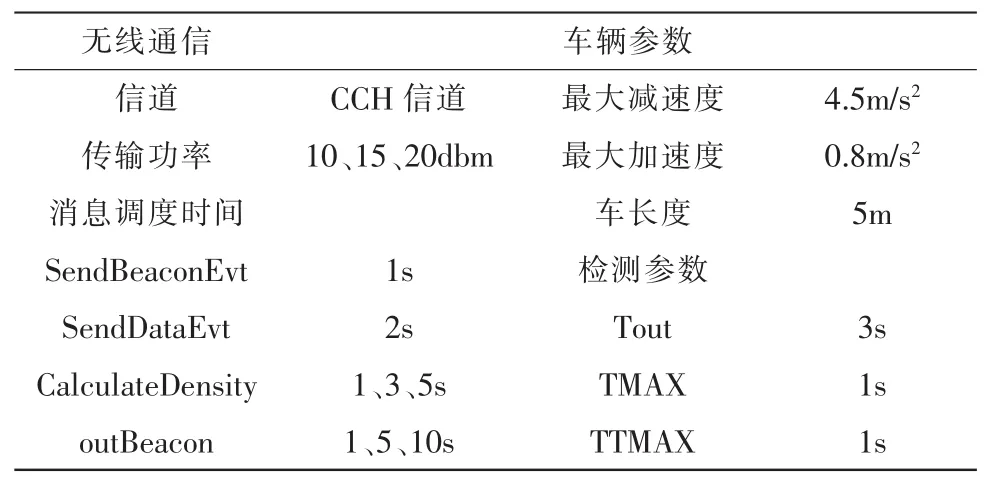
表5 参数设置
3 仿真结果
由于采用基于车载自组织网络的交通拥堵探测最基本的能力就是能够提供一个尽量接近实际情况的估算值,只有车辆能够在行驶中尽量准确地估算四周的车辆密度,提供准确的关于拥堵的相关信息,这种拥堵检测方法才具有实用价值。所以本文通过三方面来评估Si-CoTEC的准确性以及可行性:密度估算误差、拥堵队列长度估算误差以及换路情况。
3.1密度估算误差对比
密度的估算误差是指利用Si-CoTEC机制得到的密度估计值与实际的车辆密度的误差,通过将这个密度估算误差与利用闭路摄像机得到的密度估算误差进行比较,可以直观地评价这个基于车辆间通信的交通拥堵探测机制是否可以提供与传统的交通监测技术提供相同准确度的密度估算值。SUMO中设定磁感应线圈模拟传统智能交通中闭路电视进行交通监测的行为,在仿真地图中从出发点开始,每条车道上设定每隔100 m安装一个磁感应线圈,每个磁感应线圈会生成一个文档,记录下规定时间内通过该线圈的车辆数目、车流和平均速度,现设定磁感应线圈每隔10 s进行一次统计,进行计算、求解均值得到传统智能交通检测方法的车辆密度值。经过前面的研究,设置最佳参数,将合作拥塞检测密度误差与传统智能交通检测密度误差进行对比,采用分析计算密度定时器时间的仿真场景,结果图4。
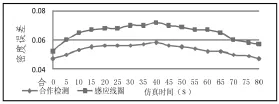
图4 密度误差对比
如图4所示,检测所得的车辆密度误差控制在0.05左右,当仿真时间到达到40 s,车辆密度达到了80veh/km/lane时,此时密度误差有所增大但仍属于小误差。通过对比可以发现,采用合作检测相比于传统的智能方式检测到的车辆密度更为准确且相对实际密度差值很小。
3.2拥堵队列长度估算对比
合作拥塞检测不仅仅可以检测到整体的拥塞状况,还可以检测到拥塞队列的长度。拥塞队列长度对于驾驶者是否需要换道是很重要的依据,因此需要得到准确的拥塞队列长度值。合作检测中可以根据Data消息中的两个车辆位置信息计算出拥塞队列的长度,而通过SUMO可以计算出实际拥塞队列长度,计算两者之间的差值。本文模拟两种不同的场景:场景Y,车辆遇到问题逐渐减速为0;场景H,车辆开始加速驶出拥塞。每个车道上最多通过一百辆车。分别在场景Y和场景H下研究长度误差,仿真参数设定为最优参数。
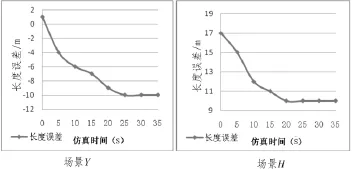
图5 拥塞队列长度误差
如图5所示,仿真所用场景与研究传输功率时一致,在场景Y下,确定拥塞队列前端车辆是通过车辆发送的Beacon消息来判定的,此时的拥塞队列最前端车辆并非是真正的最前端车辆,只是拥塞队列前部的某辆车,通过这辆车的位置信息计算拥塞队列长度时,因为其位置靠后,会低估队列长度。开始时由于后方车辆之间的间距较大,且拥堵的长度不是很大,车辆转发一次便可以将消息传输到尾端,判定的尾端车辆过于靠后,高估队列长度,最终得到的队列长度误差较小。随着仿真时间增加,车辆之间的间距逐渐减小,且拥塞的车辆数目变多,车辆转发后判定的拥塞队列尾端车辆也越来越准确,最终检测到的拥塞队列长度因为拥塞队列最前端车辆判断不准维持在比实际队列长度小10 m左右的水平。场景H下,拥塞队列前端车辆的判定是通过行驶状态来确定的,刚开始时,第一辆驶出拥塞队列的车辆需要开出去较远的距离才能检测到自由行使的状态,此时判定的拥塞队列最前端车辆离开拥塞队列较远,会造成队列长度的高估。而对于拥塞队列尾端的判定由于车辆行驶状态稳态,间距小,判定准确。此时得到的拥塞队列长度比实际计算得到的长,随着仿真时间增加,车辆的速度越来越快,驶出拥塞队列的车辆与其后方车辆之间的间距减小,判定的拥塞队列最前端车辆也越来越准确,并且随着密度的减小,后方车辆拥塞状态与自由行驶车辆之间的间距减小,队列长度计算较准确,最终保持队列长度误差10 m左右,这种误差是可以接受的。
3.3换路概率
拥塞检测的目的是为了给驾驶者提供驾驶参考,为了检验合作拥塞检测对于车辆换路的影响,提出一个换路概率的想法。换路概率是指在前方检测到拥塞的情况下,后方靠近车辆选择换路的数目与总数目的比值,此时的换路依据是检测到的拥塞程度,设定拥塞队列拥塞程度大于0.4时选择换路。模拟三种不同的车辆密度:A:20veh/km/lane,B:40veh/km/lane,C:60veh/km/lane,通过改变车辆之间的间距来实现不同的密度状况,设定车辆行驶过程中停止30 s,在三种场景下从车辆检测到拥塞开始,统计车辆数目,直到检测不到拥塞时停止统计,计算这段时间内的换路车辆数目与总数目的比值。
图6所示,当车辆密度较小时,只有车辆行驶速度很小的情况下才检测到拥塞,一旦拥塞缓解,整个车流前端的车辆大多能够离开队列,只有当后方靠近车辆过多且速度受限时才检测到拥塞,因此大多数车辆可以直接行驶,无需换路;随着车辆密度变大,车辆停止时进入拥塞队列的车辆数目变多,拥塞缓解时能够驶出拥塞队列的车辆减少,并且需要达到一定的速度才能算是处于自由行使状态,此时后方靠近车辆大多需要换路行驶;当到达情况C的严重拥塞状况时,几乎所有的车辆都选择了换路行驶,这样能够减缓拥塞路段的拥塞程度。

图6 不同车辆密度的换路概率
4 结束语
文中主要介绍了基于合作机制的车辆自组网拥塞检测的具体实现过程,首先介绍了车辆自身拥塞检测,之后通过消息的传送实现了车辆合作拥塞检测,确定了整个拥塞队列的拥塞程度和拥塞队列长度,最后通过仿真表明该机制可以对车辆拥塞进行有效的控制,并且利用换路概率可以有效的降低车辆拥塞程度,在遇到交通拥塞时,能及时的给驾驶者提供参考,方便其做出选择,及时避免交通拥塞。
[1]R.Bauza;J.Gozalvez.Traffic congestion detection in largescale scenarios using vehicle-to-vehicle communications[J]. Journal of Network and Computer Applications,2013,36(5):1295-1307.
[2]Venkata Subba Reddy,P..Generalized fuzzy logic for incomplete information[C].Fuzzy Systems(FUZZ),2013 IEEE International Conference on,2013:1-6.
[3]Major highway performance ratings and bottleneck inventory,State of Maryland[C]//Spring 2008.Skycomp,Inc.in association with Whitney,Bailey,Cox and Magnani,LLC;November,2009.
[4]Highway capacity manual-HCM 2000.Transportation Research Board[C]//National Research Council;2000.
[5]Schuh C H.Fuzzy sets and their application in medicine[C]. Fuzzy Information Processing Society,NAFIPS 2005,Annual Meeting of the North American,IEEE,2005:86-91.
[6]Song Yi,Xie Jiang.A distributed broadcast protocol in multihop cognitive radio ad hoc networks with collision avoidance[J].IEEE Transactions on Mobile Computing.2015,14(3): 509-524.
[7]Fussler H et al..Contention-based forwarding for mobile ad hoc networks[J].Ad Hoc Networks,2003;1(4):351-369.
[8]Daniel Krajzewicz,Jakob Erdmann,Michael Behrisch,and Laura Bieker.Recent Development and Applications of SUMOSimulation of Urban Mobility[C].International Journal On AdvancesinSystemsandMeasurements,2012;5(3&4):128-138.
[9]Musaddiq,A.;Hashim,F.,"Multi-hop wireless network modelling using OMNET++simulator,"in Computer,Communications,and Control Technology(I4CT)[C]//2015 International Conference on,2015:559-564,21-23.
[10]Arellano W,Mahgoub I.TrafficModeler extensions:A case for rapid VANET simulation using,OMNET++,SUMO,and VEINS[C]//2013 10th Interna-tional Conference on High CapacityOpticalNetworksandEnablingTechnologies(HONET-CNS),2013:109-115.
Research on congestion detection mechanism based on vehicle cooperation
TAN Guo-ping,LIU Ru-tong,TAN Lin-feng
(College of Computer and Information,Hohai University,Nanjing 211100,China)
Aiming at the difficulty of the vehicle congestion control in ad hoc network,this paper adopts the cooperative congestion detection and the path selection method combing distance with congestion to propose the Si-CoTEC(Simplified Coperative Traffic congestion detECtion),it is based on Vehicle-to-Vehicle communications.This mechanism not only considers the congestion degree detected by individual vehicle,but also considers all vehicles within the congestion queue when detects congestion.The mechanism can obtain the density and the length of entire congestion queue,simulation showed that the mechanism can effectively control the congestion of vehicles.In this paper,the detected density and length of congestion queue also being processed,a recommending value of changing road based on fuzzy mathematic theory is proposed. According to the value,simulation showed that vehicle can avoid making mistaken decisions of change road when there is no need to choose another way effectively,thereby reduce the probability of vehicle congestion.
ITS;vehicle ad hoc network;congestion detection;congestion control
TN929.5
A
1674-6236(2016)21-0118-04
2015-10-31稿件编号:201510239
谭国平(1975—),男,湖南澧县人,博士,副教授。研究方向:移动自组网,无线通信信号处理,随机网络优化与控制和网络信息论。
猜你喜欢
小学生学习指导(低年级)(2020年10期)2020-11-26
数学小灵通(1-2年级)(2020年9期)2020-10-27
小学生学习指导(低年级)(2020年4期)2020-06-02
软件(2020年3期)2020-04-20
通信产业报(2020年43期)2020-01-15
军营文化天地(2018年2期)2018-12-15
作文大王·低年级(2017年11期)2017-12-05
小学生学习指导(低年级)(2017年12期)2017-11-22
产品可靠性报告(2017年7期)2017-09-05
中国卫生(2014年12期)2014-11-12
