
基于PolyWorks软件的三维点云数据建模的研究
2016-11-19 16:47张天绪
科技创新与应用 2016年4期
张天绪

摘 要:简单介绍了Cyrax 2500 3D激光扫描仪的工作原理与获取点云数据的工作流程及Cyc1one6.0软件的点云数据处理。详细介绍了PolyWorks V11软件建立三维模型的具体流程及注意事项。文章以辽宁工程技术大学图书馆为例,详细论述了获取点云数据和处理点云数据技术。以小汽车为例,建立了小汽车的NURBS曲面模型。
关键词:3D激光扫描仪;PolyWorks;三维模型;点云数据
前言
3D激光扫描技术已被广泛的应用于许多领域。硬件方面不断完善,数据采集的精度和速度都有了很大提高,出现了不少成熟的商用3D激光扫描硬件系统。在3D激光扫描数据处理方面,也出現了许多软件,如Cyc1one6.0、Geomagic、Imageware、SurfaceStudio、Rapid form、PolyWorks软件等。3D激光扫描数据处理的结果就是建立3D模型。3D模型分两种:三角化模型和NURBS曲面模型。
文章研究了1个案例,案例一是辽宁工程技术大学的图书馆模型,案例二是小汽车模型。通过Cyrax 2500 3D激光扫描仪获取研究目标的点云数据,用 PolyWorks V11软件对点云数据进行处理,包括多站点云数据对齐、合并、生成三角化模型、三角化模型漏洞修补和优化等,最后生成NURBS曲面模型。
1 数据采集
1.1 Cyrax 2500 3D激光扫描仪的工作原理
Cyrax 2500 3D激光扫描仪内部有一个激光器,两个旋转轴异面且互相垂直的反光镜。反光镜由步进电机带动旋转,而激光器发射的窄束激光脉冲在反光镜作用下,沿纵向和横向依次扫过被测区域。激光脉冲被物体漫反射后,一部分能量被3D激光扫描仪接收,如图1。测量每个激光脉冲从发出到返回仪器所经过的时间,可以计算出仪器和物体间的距离S。同时测量每个激光脉冲与仪器固有坐标系X轴的夹角α,XOY面的夹角θ,可以算出被测物体表面点的3D坐标。扫描点绘制在屏幕上,组成密集的点云。
1.2 Cyrax 2500 3D激光扫描仪的工作流程
由于激光扫描仪本身的限制,我们每次扫描只能得到场景局部的数据。为了得到一个场景完整的3D数据,我们往往需要从不同的位置和不同的角度多次扫描该场景。相邻两站的扫描数据应该有重合的部分,重叠部分应该占整个图像的20%-30%为最佳。
文章利用Cyrax 2500 3D激光扫描仪获取辽宁工程技术大学图书馆的点云数据。在距离图书馆30m的前方,设置两站,每站又从不同角度共进行四次分景扫描。扫描仪根据软件环境中设置的参数自动进行扫描。
2 数据处理
2.1 在PolyWorks V11中建模
2.1.1 对齐数据
对齐模块中,有两种对齐方式:一点对齐和n点对齐。如果图形复杂就应该采用n点对齐方式,以提高对齐的精度。本论文的两个案例都是采用n点对齐,点对越多对齐越精确也就需要越多的时间。当所有图片都输入后,还要进行最佳拟合对齐,总体上最小化对齐误差。
2.1.2 生成三角化模型
当分块数据对齐后,需要将其合并成一个整体以增强数据的完备性、方便后续应用。在合并模块中设置相关参数(最大距离、采样步长、平滑半径、内存大小等)来生成一个三角化模型。以上参数的确定非常重要,直接影响到所生成的三角化模型的质量。一般情况下那些参数值由对齐模块传入的,也可以根据用户的经验与要求来自己设置。生成三角化模型的同时也对数据进行了初步筛选。
2.1.3 改进三角化模型
在经过数据对齐、合并建网之后,往往还需要改进三角化模型,诸如删除拓扑错误、填补漏洞、简化压缩等后处理操作。一般的拓扑错误可以通过软件自动检测并删除。
三角化模型上出现的漏洞需要将其补出来。补洞是最耗费时间与精力的一项工作,要想将所有漏洞都完美的补出来就要有耐心一点一点来进行。简单的漏洞可以选择自动补洞方式或手动补洞方式来完成。复杂点的漏洞就需要很多人工干预才可以补好,如补洞的区域是一个曲面,用自动或手动补洞都不能很好的填补漏洞。这就需要在漏洞区域锚定一个m行n列的曲面来填补该漏洞。在补洞之后往往跟随着优化网格、光顺顶点等操作,来提高三角化模型的质量。
2.1.4 生成NURBS曲面模型
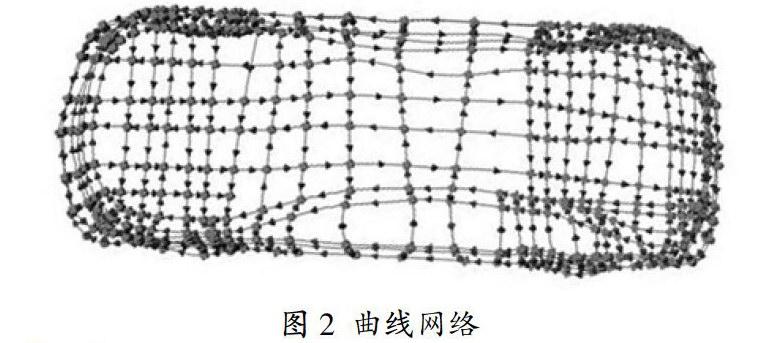
NURBS(非有理B样条)是用于计算机图形描述复杂对象的曲线或曲面。首先,在三角化模型上拟合曲线网格,然后基于曲线网格拟合NURBS曲面到三角化模型上。PolyWorks支持T形节和三角片面,可以在孔洞上建立曲面,这是PolyWorks软件功能强大的原因之一。一般的建模软件只是生成三角化模型,而PolyWorks可以生成高质量的NURBS曲面模型。
立曲线网格是创建NURBS曲面的第一步。必须抽取模型的边界曲线来定义模型的几何形状。可以自动抽取特征曲线也可以手动锚定曲线。当曲线网络创建完,就可以基于曲线网络生成NURBS曲面模型。
3 结束语
PolyWorks是目前市场上最优秀的激光扫描和点云数据处理集成软件之一。它能快速和高品质地处理由各种各样的3D扫描仪获取的点云数据。文章提供了一种利用PolyWorks软件进行数据处理并建立NURBS曲面模型的方法。
参考文献
[1]李强,王红梅.实物反求工程中的模型重建技术[J].机械制造与研究,2003(4):17-20.
[2]成思源,余国鑫,张湘伟.逆向系统曲面模型重建方法研究[J].计算机集成制造系统,2008,14(10):1934-1938.
[3]马立广.地面3D激光扫描仪的分类与应用[J].地理空间信息,2005,
3(3):60-62.
猜你喜欢
计算技术与自动化(2022年1期)2022-04-15
科技创新导报(2021年33期)2021-04-17
智富时代(2019年8期)2019-09-23
智富时代(2019年8期)2019-09-23
智富时代(2019年4期)2019-06-01
智富时代(2019年4期)2019-06-01
卷宗(2017年16期)2017-08-30
电子技术与软件工程(2016年24期)2017-02-23
中国动物保健(2015年4期)2015-10-21
现代营销·经营版(2015年3期)2015-04-20
