
基于Blob原理的手机触摸屏测试仪的目标检测
2016-11-19 16:47乔伟哲范兆周金永
科技创新与应用 2016年4期
乔伟哲 范兆 周金永


摘 要:针对目标检测算法准确性和高效性不断提高的要求,提出了利用Blob分析算法对所采集的图像进行识别的方法,对所选图像中的目标点所在的区域进行二值化、区域分割等算法得到该区域感兴趣的图像,从而得到定位数据。在图像二值化上运用Blob分析得到圆的轮廓信息,使用标记圆灰度特性、圆形度、尺寸特征来筛选标记圆,圆心定位采用具有亚像素定位精度的最小二乘法拟合。
关键词:Blob算法;图像处理;目标定位;亚像素定位精度
1 概述
Blob算法用来从图像背景中分离出目标,并测量任意目标物的特征参数,如Blob的面积、质心、尺寸、周长、数量、方位、最小边界区等参数。与基于逐点像素处理的算法以及其他图像处理的算法相比,该算法实时性好,处理速度快[1-5]。这种方法在PC机上已经有了很多的应用实例,而文系统的硬件平台是基于手机触摸屏测试仪的[6]。
2 系统校准
本系统利用六轴机器人控制触摸屏手写笔,不同角度保持一定的压力在触摸屏上按照预定的方式与路线行走。控制过程中采用CCD相机与金属测头之间位置关系进行系统校准。通过CCD相机定位手机屏幕上的目标点,控制金属测头到目标点运行。校准方法通过安装在工作台上的一块触摸屏实现,采用光纤传感器作为参照物,分别测量相机中心正对光纤传感器时的坐标以及金属侧头中心正对光纤传感器时的坐标,从而确定两者之间的位置关系。图1为光纤传感器在相机中成的像,通过图像处理能够获得光斑的圆心坐标,进而得到相机中心移动到光斑圆心后的机械手坐标[7]。
控制金属测头在光纤附近按行扫描得到一系列的采样点,在理想情况下,这些采样点的应该是分布在以光纤中心为圆心的圆上。图2蓝色的点是实际测得的采样点,中间的蓝点是按照最小二乘法拟合的圆心位置,粉色点是拟合出的圆的实际位置分布。
由圖2可知颜色较深部分看起来误差比较大,后来提出加聚光透镜将光束变小从而减小,误差的方法,结果如图3所示。
3 Blob算法
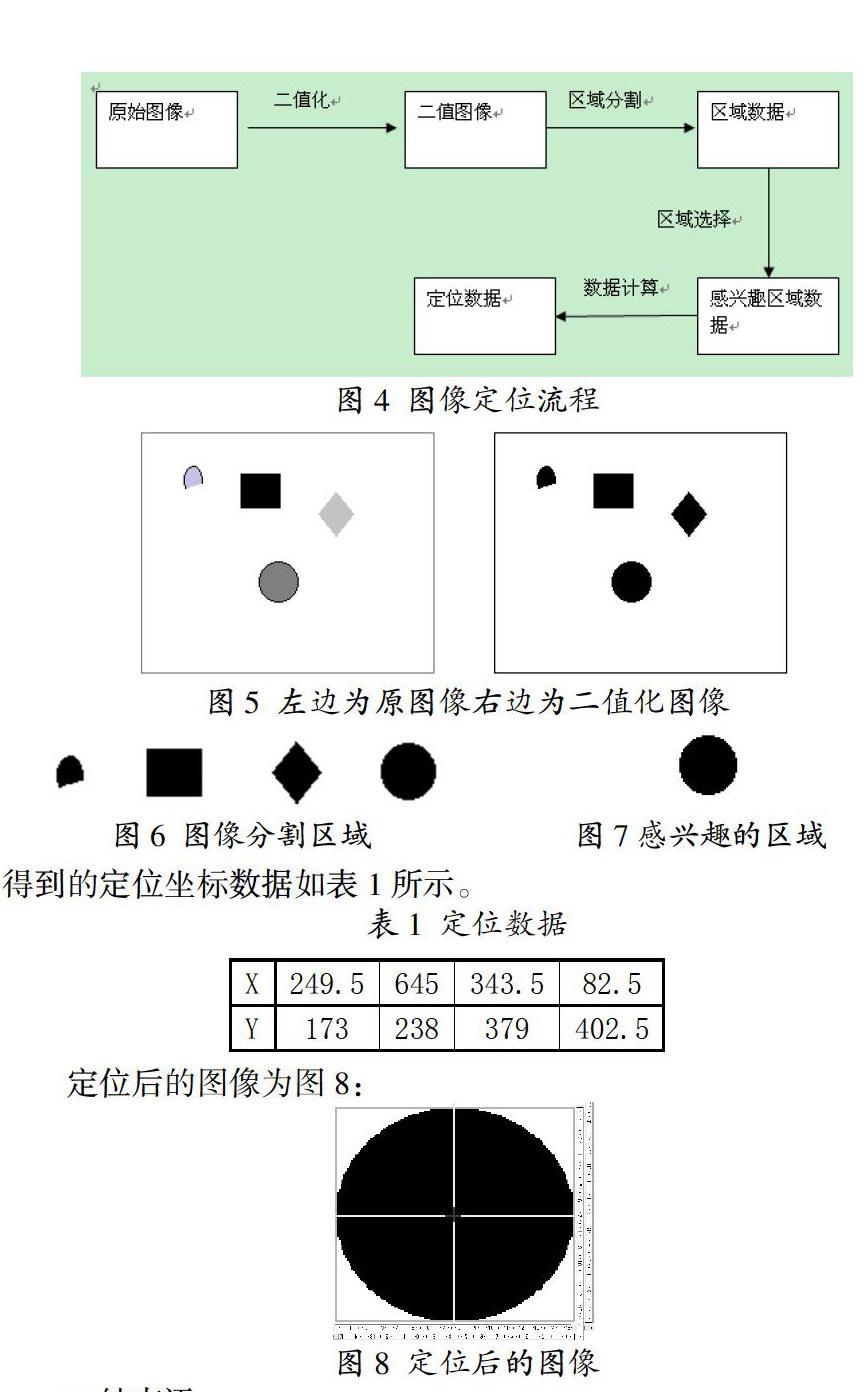
Blob算法,就是把在一块区域内出现“灰度突变”的范围找出来,并确定形状、大小、面积及准确位置等的一种算法。在进行Blob算法之前,首先图像进行二值化预处理。文章采用亚像素精度阈值分割的方法提高检测精度,并对图像进行了初步的分割,这样就产生了Blobs。Blob分析得到的仅是图像的中心坐标,文章采用最小二乘拟合的亚像素定位技术结合CCD的标定数据确定所需中心坐标。图4-图7为处理过程以及结果成像图。
4 定位数据分析
5 结束语
文章主要研究了机械手臂的侧头与夹具安装光纤传感器的对位,以及对CCD所取照片的处理最终取得定位图像。通过对图像进行拟合得到最终坐标。这是对测试仪进行点测试、图形测试的重要前提。实验表明该方法抗干扰强、运算速度快,识别度高。
参考文献
[1]耿瑞芳,曹柳林,耿盛,等.机械手视觉系统设计与实现平[J].仪器仪表用户,2007(1):36-38.
[2]边肇琪.模式识别[M].北京:清华大学出版社,2000.
[3]胡震,袁小海,陈荣盛,等.用于目标检测和精确定位的水下机器人视觉系统[J].中国造船,2000(2):89-94.
[4]徐龙飞.基于视觉反馈的动态分钢系统仿真研究[D].长沙:中南大学,2012.
[5]黄松涛,耿林,黄再辉,等.基于液晶和触摸屏的数字电源人机交互系统设计[J].电子测量技术,2012,35(12):87-90.
[6]何薇,钱增磊,唐超.基于机器视觉的机器人写字技术的设计[J].江南大学学报,2011,10(5):56-59.
[7]H.Saada,M.Rostampour. R-Charged Black Hole and Neutrino Oscillation[J].International Journal of TheoretiCal PhysiCs,2012,51(9): 2900-2908.
作者简介:乔伟哲(1990-),男,山西太原人,硕士研究生,研究方向:信号与信息处理。
猜你喜欢
今日自动化(2022年5期)2022-07-22
电脑知识与技术(2022年9期)2022-05-10
电脑知识与技术(2022年9期)2022-05-10
计算技术与自动化(2022年1期)2022-04-15
教育教学论坛(2018年5期)2018-01-22
教学月刊·中学版(教学参考)(2016年12期)2017-01-03
亚太教育(2016年35期)2016-12-21
计算机教育(2016年9期)2016-12-21
职教论坛(2016年22期)2016-11-19
科技视界(2016年20期)2016-09-29
