
探月飞行器效能评估研究与实践
2016-11-17 08:56傅晓晶富小薇宋世民
计算机测量与控制 2016年9期
傅晓晶,富小薇,赵 阳,宋世民
(北京空间飞行器总体设计部,北京 100094)
探月飞行器效能评估研究与实践
傅晓晶,富小薇,赵 阳,宋世民
(北京空间飞行器总体设计部,北京 100094)
航天器飞行效能评估是整器级测试验证以及在轨飞行结果评价中不可或缺的重要环节,针对我国探月三期月地高速再入返回飞行试验,提出了一种基于任务剖面的航天器飞行效能评估方案;提取7个任务剖面、17个约束条件,建立面向月地再入返回过程的指标评估体系;通过定量、定性指标量化计算、权重系数层次分析法计算各任务剖面的能力度量值,解决了系统目标完成能力不易定量描述的难题,实现了对月地转移段、大气层外自由飞行段、再入段、跃出段等过程自主飞行能力的科学定量评估,对后续月球无人采样返回、火星探测等探测器系统的效能评估具有一定参考意义;该方法已应用于月地高速再入返回飞行器系统。
探月飞行器; 任务剖面; 效能评估
0 引言
我国探月三期开展的月地高速再入返回飞行,具有再入速度高、再入航程长、再入热环境恶劣、再入制导控制模式复杂等特点和难点,上天前必须在地面进行充分的模拟在轨全任务飞行测试,验证由多个任务剖面组成的全周期在轨飞行过程控制策略与飞行逻辑的正确性。为了有效衡量飞行器系统优劣,科学评价模拟飞行结果,需要建立一套全任务模拟飞行效能评估方法。
在航天器系统级测试领域,传统的全任务模拟飞行数据评估主要是对航天器成百上千个遥测参数,开展横向比、纵向比和联合比,确保测试数据判读的全面性,实现对航天器系统功能、性能的定性评估。这种方法耗时耗力,且无法站在系统级的高度,实现对航天器飞行任务的完成能力的定量评估。基于此,本文通过建立系统级基于飞行任务的指标评价体系和飞行任务目标完成能力定量评估方法,衡量飞行器完成目标飞行任务的精确度,实现对月地高速再入返回飞行效能的评估,从而为系统升级优化以及任务能力的提升提供支持[1-2]。
1 效能评估方案设计
月地高速再入返回飞行效能评估方案流程如图1所示,通过提取7个飞行剖面、17个约束条件共49个关键参数,建立系统级基于飞行任务的指标评价体系;通过定量、定性指标量化计算、权重系数层次分析法等计算各约束条件、任务剖面的能力量化值,解决了飞行器目标完成能力不易定量评估的难题,实现对导航建立段、配平段、再入段、跃出段等过程自主飞行能力的科学评估。

图1 月地高速再入返回飞行效能评估流程图
评估方案设计如下:
1)读取遥测信号中的飞行阶段标志参数,通过判读飞行阶段标志参数的取值,确定该飞行阶段标志参数对应的任务剖面,进而确定对应任务剖面对应的开始时间和结束时间,建立每个任务剖面的任务剖面符号F1(t1,t2)~F7(t7,t8),并依据各任务剖面的轨道特性。
2)提取与步骤1)中确定的任务剖面一一映射的子飞行目标,建立每个子飞行目标的子飞行目标符号N1(t1,t2)~N7(t7,t8);
3)确定步骤2)得到的每个子飞行目标的约束条件集si;
4)确定步骤3)中每个约束条件sij对应的指标集Xij;
5)对步骤4)中确定的指标集中的指标进行分类,若为定量指标,则进入步骤6),若为定性指标,进入步骤7);
6)利用预先给定不同约束条件对应的指标集中指标的最大值和最小值,计算每个定量指标的归一化数值;
7)利用基准云及相似性比较算法,计算每个定性指标的归一化数值;
8)根据步骤6)和步骤7)中的计算结果,确定每个约束条件的能力函数值,所述能力函数值具体由公式(1)给出:
(1)
式中,pij为约束条件sij的能力函数值,εk为约束条件sij对应的指标集Xij中第k个指标的归一化数值,wk为约束条件sij对应的指标集Xij中第k个指标的权重系数,w1+w2+...+wm=1,m为约束条件sij对应的指标集Xij中的指标个数。其中,权重系数利用层次分析法确定[3]。
9)利用层次分析法确定每个子飞行目标约束条件集si中每个约束条件的权重系数,利用步骤8)中计算得到的每个约束条件的能力函数值,确定每个任务剖面的能力量化值,具体由公式(2)给出:
(2)

10)利用步骤9)中确定每个任务剖面的能力量化值,计算月地高速再入返回飞行能力量化值,由公式(3)给出:
(3)
2 月地再入返回飞行效能评估
2.1 飞行任务分析
月地高速再入返回飞行器由服务舱和返回器两个航天器组成,试验任务是采用地月自由返回轨道,由CZ-3C运载火箭直接发射入轨,在月地转移段距地球约5 000 km高度分离返回器,返回器以接近第二宇宙速度进入大气层,经跳跃式弹起后被地球捕获再次进入大气层,实现长航程飞行,最终在内蒙古中部地球安全、精准着陆,配合地面完成搜索和回收。
将月地高速再入返回飞行按照任务阶段进行划分,依据轨道特性得到每个任务剖面的起始时间及任务目标,见表1。

表1 月地高速再入返回飞行任务剖面定义
2.2 建立指标评价体系
系统指标评价体系是衡量月地高速再入返回飞行器系统在特定条件下完成规定任务程度的尺度,它是飞行品质评估得以进行的基准。先从各任务剖面的子飞行目标出发,分析每个阶段对任务目标成败产生影响的约束条件。然后再依据方案设计中的指标分配,确定评价约束条件的指标集,最终集合所有任务剖面的指标集,形成能够衡量飞行结果的指标评价体系[4-5]。
2.2.1 提取约束条件
围绕表1中的每个子飞行目标,提取对任务目标完成起决定性作用的因素,包括影响安全的、可能导致任务终止的、造成飞行计划更改的因素,将其定义为约束条件。si定义为影响子飞行目标Ni(ti,ti+1)成败的约束条件集。si的提取过程如下所示:
1)N1(t1,t2)->s1:由于月球返回地球的再入走廊具有范围窄、精度高的难点,若月-地转移过程中最后一次轨道修正精度无法满足指标要求,导致实际再入角偏大或偏小,就会由于返回器的气动升力有限不能实现跳跃飞行或者跳出大气边界的速度大于环绕速度无法被地球捕获。由上分析,提取出s11为月地转移段最后一次轨道修正精度是否满足预设阈值;
2)N2(t2,t3) ->s2:高精度导航基准建立需保证返回器在导航开始时刻初始对准误差,即位置误差、速度误差、姿态角和角速度误差满足指标要求。初始导航误差主要影响因素包括陀螺随机漂移、加速度计零位偏差、惯性测量单元在轨安装矩阵与地面装订矩阵偏差,地面测控站测定轨精度,星敏感器-陀螺滤波得到的姿态初始化精度。由上分析,提取出s21为惯性测量单元初始偏差补偿精度是否满足预设阈值,s22为测定轨的定位定速精度是否满足预设阈值,s23为初始姿态对准精度是否满足预设阈值;
3)N3(t3,t4) ->s3:两器分离后,返回器在大气层外主要是维持惯性姿态飞行。此外,导航和制导能力对本阶段任务成败无直接影响,是后续再入大气后飞行的关键因素。因此,提取s31为姿态控制精度是否满足预设阈值;
4)N4(t4,t5) ->s4:返回器在飞行高度为120~300 km期间,主动进行俯仰方向的姿态控制,目标是将攻角调整至配平攻角附近,为初次进入大气做好准备。因此,提取s41为攻角控制精度是否满足预设阈值。
5)N5(t5,t6) ->s5:(1)返回器初次进入大气层后,在气动升力作用下成功实现跃起,初次再入点位置、速度需满足约束条件。(2)在再入过程中,姿态机动是由制导律实时决定,制导算法又是依赖于导航结果,因此导航精度直接影响落点精度。(3)制导策略是以二次再入点的位置、速度为目标,在动压、过载、热流等约束条件下,实时规划并调整初次再入飞行弹道,并在线规划出一个可行的倾侧角剖面使得返回器按照此剖面进行倾侧角控制,可以精确到达目标位置。若制导误差太大,可能造成返回器直接坠入大气,无法跃出大气层实现长航程的跳跃式飞行,导致任务失败。(4)姿态控制的主要任务是依据制导输出的倾侧角剖面,进行倾侧角的控制,实现期望阻力加速度的跟踪,满足系统制导的要求。由上分析,提取出s51为再入点精度是否满足预设阈值,s52为导航精度是否满足预设阈值,s53为制导精度是否满足预设阈值,s54为姿态控制精度是否满足预设阈值;
6)N6(t6,t7) ->s6: 返回器经过第一次进入大气层减速后,跃出大气层时的速度和速度倾角是返回器是否能重新被地球捕获的最关键因素;此外,返回器在跃出大气层后要保持姿态在惯性空间的稳定,并进行INS+GPS联合导航,确保导航系统精度。由上分析,提取出s61为跃出点精度是否满足预设阈值,s62为姿态控制精度是否满足预设阈值,s63为导航精度是否满足预设阈值;
7)N7(t7,t8) ->s7: 区别于初次再入段,二次再入点的速度小于第一宇宙速度,且以10 km开伞点的位置为制导目标。二次再入段能够精确到达开伞点位置的约束条件与初次再入段类似,提取出s71为二次再入点精度是否满足预设阈值,s72为导航精度是否满足预设阈值、s73为制导精度是否满足预设阈值、s74为姿态控制精度是否满足预设阈值。
2.2.2 建立指标集
确定2.2.2节中每个约束条件sij对应的指标集Xij,具体如下:
X11={发动机点火精度、加计测量精度、姿态控制对轨道扰动、点火期间姿态稳定度};
X21={陀螺常漂标定残差、加计零偏标定残差、IMU安装误差标定残差};
X22={导航建立初始位置误差、导航建立初始速度误差};
X23={星敏感器测量精度、标定中星敏可用个数};
X31={本体系相对于惯性系角度、本体系相对于惯性系角速度};
X41={攻角}
X51={初次再入点高度、初次再入点维度、初次再入点速度大小、初次再入点速度方向};
X52={惯性系下三轴位置误差、惯性系下三轴速度误差};
X53={倾侧角曲线特性、弹道高度曲线特性、弹道速度曲线特性、航程曲线特性、航程变化率曲线特性、轴向过载曲线特性};
X54={倾侧角控制误差、俯仰角控制误差、偏航角控制误差};
X61={跃出点速度大小、跃出点速度方向};
X62={本体系相对于惯性系角度、本体系相对于惯性系角速度};
X63={惯性系下三轴位置误差、惯性系下三轴速度误差};
X71={二次再入点高度、二次再入点纬度、二次再入点速度大小、二次再入点方向};
X72={惯性系下三轴位置误差、惯性系下三轴速度误差};
X73={倾侧角曲线特性、弹道高度曲线特性、航程曲线特性、航程变化率曲线特性、轴向过载曲线特性};
X74={倾侧角控制误差、俯仰角控制误差、偏航角控制误差}。
集合上述7个任务剖面17个关键因素的指标集,形成衡量月地高速再入返回飞行结果的指标体系,见图2。
2.3 评估数据获取与处理
评价指标按属性可分为定量指标和定性指标两类,2.2节建立的评价指标集中,X53和X73为定性指标,其余均为定量指标。
将指标集的指标进行分类,若为定量指标,则进入步骤a,若为定性指标,进入步骤b;所述定性指标为指标集X53和X73中的指标,其余指标集中的指标为定量指标。
1)定量指标归一化处理。首先将定量指标分为三类:I类是评价指标越大越好,II类是评价指标越小越好,III类是评价指标位于[r1,r2]范围内为宜。然后不同的指标类型建立不同的效用函数,如下:
I类指标的归一化数值具体由公式(4)给出:
(4)

II类指标的归一化数值具体由公式(5)给出:
(5)

图2 月地高速再入返回模拟飞行指标评价体系

III类指标的归一化数值具体由公式(6)给出:
(6)
式中,其中r1为指标预设取值范围下限值,r2为指标预设取值范围上限值。
2)定性指标归一化处理。利用基准云及相似性比较算法,计算定性指标的归一化数值[6]。
根据步骤1)和步骤2)中的计算结果,利用公式(1)确定每个约束条件的能力函数值。
2.4 任务剖面能力量化
利用层次分析法确定每个子飞行目标约束条件集si中每个约束条件的权重系数,利用2.3节中计算得到的每个约束条件的能力函数值,利用公式(2)确定每个任务剖面的能力量化值。
2.5 月地高速再入返回飞行能力量化
利用2.4节中确定每个任务剖面的能力量化值,利用公式(3)计算月地高速再入返回飞行能力量化值。最终计算得到的月地高速再入返回飞行能力量化值的取值范围为[0~1],能力量化值越接近1,说明月地高速再入返回飞行器效能越高,反之,能力量化值越接近0,说明月地高速再入返回飞行器效能越低。
3 试验结果与分析
运用上述方法对地面某次月地高速再入返回模拟飞行试验的结果进行评估,计算其效能模型参数,其结果见表2。
结合表2数据,计算本次地面模拟月地再入返回飞行效能值为:
(7)
从计算结果可知,月地再入返回飞行器在本次地面模拟飞行试验中,各项关键性能指标均满足任务要求,具有较高的飞行效能,能够实现再入速度接近第二宇宙速度的月地高速返回。这与本次地面试验中实际开伞点偏差量3.06 km,优于纵程±30 km,横程±20 km的开伞点精度指标,以高精度落点
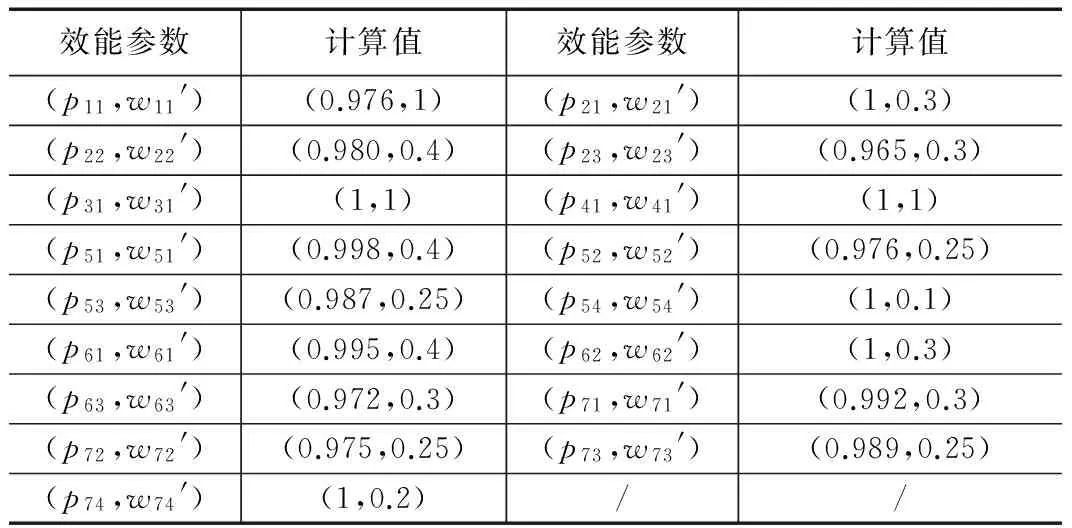
表2 某次地面模拟飞行试验效能参数
完成飞行任务的结论是一致的,表明评估模型的设计是合理的,具有较大的参考价值。
4 结束语
本文提出了一种月地高速再入返回模拟飞行效能评估方法,可以从海量测试数据中提取关键指标参数,并建立一种基于任务剖面和任务目标的指标评价体系,通过定量、定性指标量化计算、权重系数逐对比较法等计算各约束条件、任务剖面的能力量化值,解决了飞行器目标完成能力不易定量评估的难题,实现系统评估从定性到定量的升级。
[1] 赵良松. 飞机总体方案决策方法研究[D]. 西安: 西北工业大学, 2005.
[2] 冯红星. 基于飞行任务的飞行品质评估方法研究[D]. 南京: 南京航空航天大学, 2005.
[3] 王 敏. 组合导航系统性能评估与试验设计[D]. 哈尔滨: 哈尔滨工业大学, 2011.
[4] 耿俊豹,黄树红,金家善.基于任务剖面的复杂系统状态综合评估方法 [J].华中科学大学学报(自然科学版),2006,34(1):27-29.
[5] 梁彦刚,陈 磊,李海阳.基于任务分析的航天装备体系研究方法[J].火力与指挥控制,2009,34(1):56-59.
[6] 甄 伟,徐廷学,赵建忠.装备保障性定性指标验证的ANP-C方法[J].舰船科学技术,2012,34(12):126-130.
Research and Practice on Effectiveness Evaluation for Lunar Explorer
Fu Xiaojing,Fu Xiaowei,Zhao Yang,Song Shimin
(Beijing Institute of Spacecraft system Engineering, Beijing 100094,China)
Effectiveness evaluation is an indispensable part in spacecraft integral testing and in-orbit flight. For the first moon-earth high-speed reentry flight, an program of flying qualities evaluation was proposed based on mission section. An evaluation index system for moon-earth high-speed reentry is achieved by extracting 7 mission section, 17 constraints including 49 key parameters. A capability quantitative estimation for mission section is established based on the method of quantifying quantitative & qualitative indicators and confirming coefficient with Analytic Hierarchy Process (AHP). It can be used in the problems with quantitative calculation the ability of the aircraft to achieving targets. The new method is applied to moon-earth high-speed reentry spacecraft.
lunar explorer; mission section; effectiveness evaluation
2016-03-13;
2016-04-25。
傅晓晶(1987-),女,福建三明人,工程师,主要从事航天器综合测试方向的研究。
1671-4598(2016)09-0288-04
10.16526/j.cnki.11-4762/tp.2016.09.081
TP3
A
猜你喜欢
中国科技纵横(2022年17期)2022-10-25
电机与控制应用(2022年4期)2022-06-27
北京航空航天大学学报(2016年6期)2016-11-16
新教育时代电子杂志(学生版)(2015年31期)2015-12-20
船舶标准化工程师(2015年5期)2015-12-03
新闻传播(2015年21期)2015-07-18
新闻传播(2015年10期)2015-07-18
语文教学与研究(2014年11期)2014-02-28
自然资源遥感(2014年2期)2014-02-27
地震研究(2014年3期)2014-02-27
