双闭环V—M调速系统仿真设计
2016-11-15 18:13党晓圆马冬梅曹强
科技资讯 2016年18期
党晓圆+马冬梅+曹强

摘 要:该文在分析双闭环V-M调速系统的基础上,根据动态参数工程设计方法,设计了电流环和转速环,确定了时间常数,计算了系统中ASR和ACR两个调节器的相关参数,校验了调节器参数,校核了转速超调量和最大速降,并利用MATLAB软件中Simulink工具建立了双闭环V-M调速控制系统的仿真模型,仿真了电机的输出转速。仿真结果表明:电机转速很快达到稳定状态,动态过程比较平稳,超调量小于3%,实现了小超调快过渡时间的转速控制。
关键词:双闭环 V-M调速 MATLAB/Simulink
中图分类号:TP391.9 文献标识码:A 文章编号:1672-3791(2016)06(c)-0025-03
近年来虽然交流电机的应用比较广泛,但是交流电机不能在低速环境下运行,转矩不容易控制,同时调速精度不高,因此直流电机仍在变速运动控制和闭环位置伺服控制系统中拥有无与伦比的地位,被广泛应用于精确控制和大范围调速场合。尤其是在晶闸管被发明之后,运用电力电子技术理论设计出晶闸管整流装置,组成晶闸管-电动机调速系统(简称V-M系统),再利用自动控制理论中的双闭环控制,在电机调速系统中加装速度调节器(ASR,Adjustable Speed Regulator)和电流调节器(ACR,Adjustable Current Regulator),使得直流电动机调速精度更精确,调速范围更广泛,可以实现精确、高效的调速控制,并且能耗低节省资源。
1 双闭环V-M调速系统
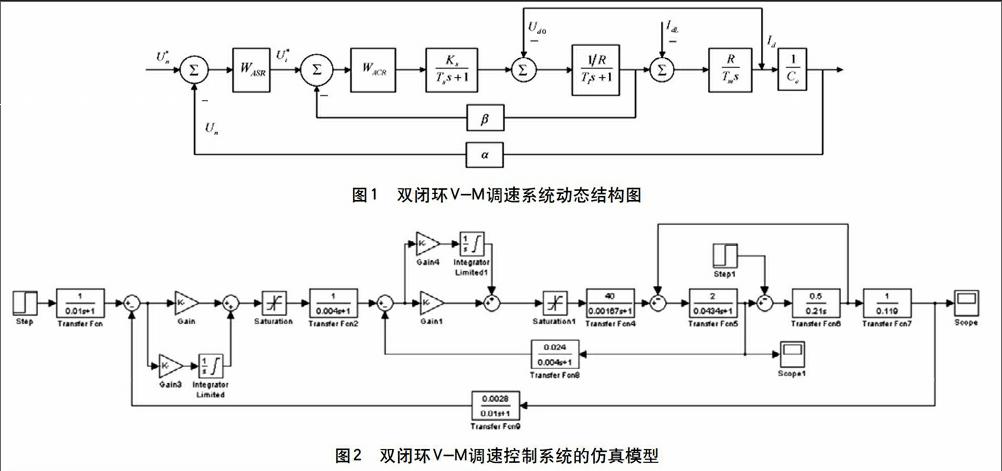
双闭环V-M调速系统是在单闭环直流调速系统中加入了转速调节器和电流调节器,分别调节转速和电流,二者之间实行串联连接。转速调节器ASR的输出作为电流调节器ACR的输入,电流调节器的输出控制可控电压源。从闭环结构上看,电流调节环在里面,是内环,转速调节环在外面,是外环,其动态结构图如图1所示。
2 调节器设计
对于双闭环调速系统,通常采用工程设计的方法来设计电流和转速调节器,遵循先内环后外环的设计流程。
2.1 电流调节器的设计
设计电流调节器时首先将电流环进行一些变换处理,然后再根据控制要求选择系统的型别,最后通过系统的动态性能指标确定系统参数。
由于来自电流检测单元的反馈信号中常含有谐波或者其他的干扰信号,为了解决这个问题需要增加低通滤波器,而低通滤波器可以用一阶惯性环节来表示,但是惯性环节会造成反馈信号的延迟。为了平衡延迟,在给定信号通道中也加入一个时间常数与之相同的惯性环节,称为“给定滤波”环节。
2.1.1 确定时间常数
由电流调节器的数学模型可知,需要对其中的时间常数、电流滤波时间常数取值,这样才能得到电流环小时间常数。
三相桥式电路晶闸管的平均失控时间为,电流滤波时间常数由三相桥式整流电路波形可以得到。我国电力系统提供的频率是50 Hz,三相桥式整流电路产生6脉波,在一个周期内的时间为3.3 ms,因此取电流滤波时间常数。Toi=4 ms= 0.004 s这样得到电流环小时间常数
2.1.2 电流调节器参数计算
因为V-M系统中绝对不能产生静差,而且系统不允许电流在突然增加的控制下有太大的超调,不能超过电流的允许值,电流环需跟随系统,超调量越小越好,所以选择典型I型系统。显然,应该采用PI调节器。检查对电源电压的抗扰性能:
,抗干扰性能适中。由典型I型系统参数与动态跟随性能指标的关系可知,各项指标均满足要求。电流调节器的超前时间常数等于电磁时间常数0.0434 s。
2.2.3 转速调节器参数校验
转速截止频率:,转速环小时间常数近似处理条件,而满足设计要求。
2.2.4 转速超调量的校核
当时,由典型Ⅱ型系统阶跃输入跟随性能指标可知,,没有达到要求的设计条件。但是,典型Ⅱ型系统阶跃输入跟随性能指标是按线性系统计算的,突然增加阶跃信号,ASR饱和时不能满足线性定常系统的条件,应该按ASR退饱和的情况重新计算超调量。系统在理想空载起动时,负载系数,若, 600r/min,允许过载倍数,电枢回路电阻 Ω, V·min/r, s, s,,则调速系统开环机械特性的额定稳态速降为:
3 仿真
该设计使用MATLAB软件中的Simulink工具进行仿真,双闭环V-M调速控制系统的仿真模型如图2所示。
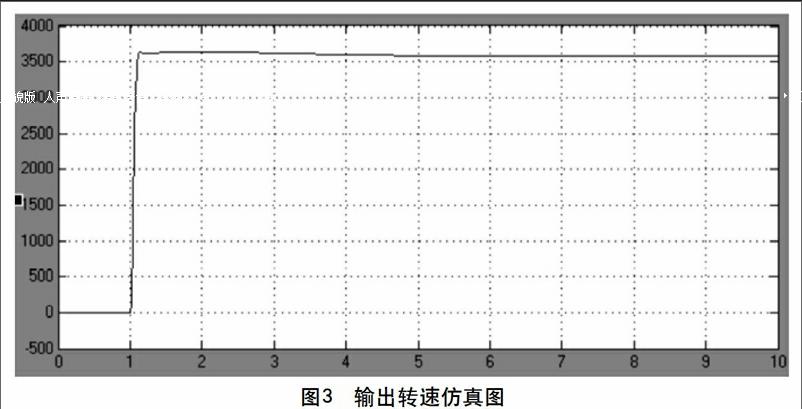
利用MATLAB软件中的Simulink工具对电机的输出转速进行仿真模拟得图3。由图3可以看出,电机转速很快达到稳定状态,动态过程比较平稳,超调量小于3%,实现了对过渡时间的转速控制。因此,将直流晶闸管和电机结合再运用双闭环调速控制可以很好地实现对电机转速“稳”“准”“快”的控制。
参考文献
[1] 杨耕,罗应立.电机与运动控制系统[M].北京:清华大学出版社,2006.
[2] 赵广元.MATLAB与控制系统仿真实践[M].北京:北京航空航天大学出版社,2014.
[3] 郑光.双闭环直流调速系统优化及仿真研究[J].计算机仿真,2013,7(30):321-325.