潜艇超空泡技术应用分析
2016-11-15 14:25杜佩佩肖昌润
舰船科学技术 2016年6期
杜佩佩,肖昌润,刘 洋
(海军工程大学 舰船工程系,湖北 武汉 430033)
潜艇超空泡技术应用分析
杜佩佩,肖昌润,刘洋
(海军工程大学 舰船工程系,湖北武汉 430033)
结合目前国内外超空泡技术的发展,论述发展超空泡潜艇的必要性,介绍了超空泡技术基本原理。依据超空泡鱼雷的配置,提出“变形空化器”的概念;论证超空泡潜艇推进和控制系统的选择;分析导引设备和尾舵的作用以及可能出现的问题。结合4种超空泡航行体稳定模式,分析超空泡潜艇水下稳定性问题,提出超空泡潜艇发展设想。结合对潜艇操纵研究,分析超空泡潜艇的水动力特性问题。同时,对 Suboff 潜艇模型进行了流场特性的仿真计算,结果表明:潜艇的头部、指挥室的迎风面、指挥室的两侧艇体和潜艇的尾翼均存在一定的沾湿区域。基于此结果,提出相应的改进方案。对超空泡潜艇未来主要工作进行展望。
超空泡潜艇;变形空化器;CFD;稳定性;水动力;沾湿区域
0 引 言
潜艇快速性一直是国内外学者研究的重点。迄今为止,潜艇大都采用流线型设计,而其推进所需的能量与速度的立方成正比,又限于动力装置功率的问题,常规方法很难较大幅度提高潜艇的速度。高新材料技术、壁面振动减阻技术等一定程度上确实可提高潜艇速度,但收效不很明显。
水下航行体在运动过程中受到的阻力几乎是在空气中的 800~1 000 倍[1]。其主要限制因素为水的粘性阻力。然而自 1994 年,俄罗斯向外界公布的Shkval(“风雪”)超空泡鱼雷,彻底改变了传统意义上人们对水下航行体快速性的认识[2]。目前,中、乌、德、美、俄等国都在进行超空泡技术的理论和实验研究[3]。取得突破性进展的主要有:美国 AHSUM 快速射弹系统和 RAMICS 直升机快速灭雷系统研制成功;德国试验型水下超空泡火箭初步成型[4]。
在如今国际环境下,发展海军武器装备至关重要。潜艇尤其是战略导弹核潜艇,其能否快速、高效、精确的完成战略打击任务,已成为一个国家国防实力的重要象征。苏俄第2代 Alfa 攻击核潜艇,据称是水下航速最快的核潜艇,其速度也只有 40 kn左右。随着超空泡武器技术研究的日趋成熟,可以预见,潜艇要提高生存性,急需利用超空泡技术,制造“阻力危机”,解决其快速航行的问题,更大限度地提高作战效能。
据资料显示,俄罗斯自20世纪末已开始研究潜艇超空泡技术;美国21世纪初,已开始研究水下高速运输型潜艇,并且其水动力性能和动力系统在 2007 年取得突破性进展[5]。我国对超空泡技术的研究才刚刚开始,并且主要集中在对水下鱼雷、射弹等的研究。超空泡技术尚未在潜艇上得到重视。
本文介绍超空泡技术的基本原理,分析其流动问题涉及的主要相似准则数。基于“风雪”鱼雷的基本配置,结合潜艇的实际,对通气装置、控制推进系统、空化器、导引设备进行应用分析。对其在水下运动的稳定性、水动力问题结合对潜艇操纵性的研究做分析。最后对超空泡潜艇的自然超空泡进行 CFD仿真。
1 超空泡技术基本原理
早在19世纪90年代,伯努利通过对绕流物体研究,发现了著名的空化现象。超空泡,即是水下航行体高速运动过程中产生的一种物理现象。通常认为,航行体外部空泡尺度小于其自身长度的空泡为局部空泡,空泡尺度等于或超过其自身长度的空泡称为超空泡。
超空泡通常分为自然超空泡和通气超空泡。自然超空泡由于其需要高航速、低压强等条件,目前主要应用于循环水洞的试验研究。通气超空泡是利用人工设置的通气装置,增强空泡内压强从而形成超空泡[6]。
2 超空泡潜艇装置应用分析
“风雪”超空泡鱼雷其主要工作装置包括通气孔、控制与推进系统、空化器、导引设备和尾舵(见图1)。基于“风雪”超空泡鱼雷的总体配置,结合潜艇自身的特点,对超空泡潜艇对应装置做进一步的应用分析。
2.1通气装置应用分析
对于潜艇而言,其本身重量非常大,在常规条件下很难达到自然超空泡形成的条件,必须为其实行人工通气的方法,促使其快速形成超空泡,并保持稳定。通常,只要改变通气压力可以控制空泡尺寸,使潜艇运动过程中始终被空泡包围,降低其航行过程中受到的阻力。
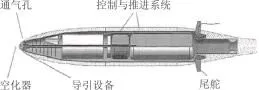
图1 超空泡鱼雷的设计模型Fig.1 The model of supercavitating torpedo
目前关于通气装置设计的文献资料非常少,并且对通气超空泡的研究,主要从其通气规律和通气压力的控制出发,研究空泡的形态、空泡的发展规律和水动力特性。可以从通气装置设计的角度出发,考虑“变形”通气孔对超空泡航行体稳定性和空泡稳定性的改进作用。
“变形”通气孔顾名思义,即是在潜艇等水下航行体运行过程中,可以根据其运动过程中空化数、空泡形状、运动状态等的变化,实时调节通气孔的形状来改变通气率的大小,保证超空泡航行体的稳定运动。由于潜艇等水下航行体在运动过程中,存在通气孔出流与空泡壁面的相互作用,如果通气率足够大,可能导致整个超空泡航行体失稳。而通过一定的技术手段,设计可以根据空泡形状自动导流的“变形”通气孔,使流出通气系统的气体流尽可能与整个空泡流场保持平行,可在一定程度上缓解通气引起的不稳定性。
2.2控制与推进系统应用分析
目前已经成型的超空泡武器有俄罗斯的“风雪”超空泡鱼雷,采用火箭发动机作为推进装置,没有装备制导控制系统。有资料称,“风雪”-2号将采用矢量推进系统实现对其控制和推进;德国 Barracuda 导弹采用固体火箭发动机作为其动力装置,同时采用空化器偏转制导,串级滚转—俯仰控制系统,通过头锥的偏转来实现对导弹的控制[7];俄学者曾提出“燃烧金属(如铝、锰等)燃料”,用海水将氧化产物作为冷却剂的喷气式推进装置或高效燃气轮机将是很有效的推进系统[8]。资料显示,美国 Pennsylvania 大学应用研究机构已经进行过“燃烧铝水冲压”系统的试验。此外,也有采用水反应推进系统,对超空泡武器施行推力矢量控制。
对潜艇本身而言,其操纵性与潜艇自身的安全、反侦察以及作战效能密切相关,因此其控制系统的研究也至关重要。简单的采用直航加传统动力装置的推进一定程度上也可以满足军事行动需要,但是需要配备极其精确的导航、定位系统,提前确定其航行轨迹。而潜艇的导航、定位技术本身就存在很多技术难点。所以,潜艇在利用超空泡技术的同时,需要充分考虑其水下机动性能。
对于上述应用于武器的制导控制系统,由于潜艇结构、用途、效能与之差异很大,所以方法大多只能作为参考。对于喷气式火箭发动机而言,如果设计一种方向可以根据需要改变的喷嘴,就可以产生潜艇改变航向所需要的力和力矩,务必注意,潜艇运动过程姿态改变时一定保证其处于超空泡内部。
2.3空化器应用分析
空化器是任一超空泡航行体必不可少的装置[9]。其置于航行体的头部,通过其攻角的改变来实现运动过程中力和力矩的平衡[10]。主要作用是诱导航行体产生超空泡,为航行体提供升力,同时也是非常重要的控制、执行机构。
目前常见的空化器形状有圆盘、圆锥及齿轮状圆台等。研究最多、应用最为广泛的是圆盘型空化器。其他还有如射流空化器、结构类似于活动铅笔的空化器等的一些特殊空化器,虽各自都有很多特性,但是迄今公开的资料显示,圆盘空化器更易使超空泡航行体保持稳定。而其最大的应用劣势是阻力较大。
2.4导引设备应用分析
潜艇自航模试验,因为其廉价、易实现、模拟流场真实,可以作为潜艇方案设计、技术评估的重要手段,而高精度的水声定位系统是自航模试验可以顺利进行的关键。对于超空泡潜艇,无疑自航模试验亦是其操纵性预报和研究的关键。为了准确、方便确定其航迹,通常需要将水声头装置其重心位置,同时水声发射头必须置于水中。超空泡潜艇的空化器是其唯一的触水区域,而水声头体积较大,无法置于潜艇空化器内,即使可以置于空化器内,其定位系统也需要做进一步的更新、完善。因此,适用于超空泡潜艇自航模的水声定位系统或者其他定位方法仍需要做进一步研究。
2.5尾舵应用分析
目前,常见的潜艇基本上都通过尾舵来产生控制力矩和提供水动力。对于处于超空泡内部的潜艇,其尾舵可能会有部分表面穿过空泡,可以提供尾部升力、转动及航态的控制。
由于尾舵的存在,会出现自由空泡边界的负面效应,而其本身也会产生传统的空化现象,会导致尾舵控制效率降低甚至失控[11],这也是在超空泡潜艇设计中需要考虑的问题。
3 超空泡潜艇水动力问题
3.1水下运动稳定性问题
潜艇在水下形成超空泡以后,主要受空化器上的水动力作用、空泡内部蒸汽的作用和空泡尾部射流的喷射作用力。由于超空泡的记忆效应[12],以及其力和力矩(不包括空化器上的水动力)系数的时间延迟效应,对潜艇运动的计算极其复杂。而潜艇相对于其他航行体,体积、质量庞大,结构复杂对其运动过程中稳定性把握非常困难。并且处于超空泡中的潜艇,螺旋桨推进器将无用武之地,传统依靠舵来提供升力和控制方向也将无法适用。一旦潜艇无法通过超空泡来维持其稳定航行状态,同时又没有配置传统的舵和桨装置,其造成的损失将不可估量。因此,超空泡技术应用于潜艇,其运动稳定性问题非常关键。
乌克兰 NAS-IHM 研究所的 Yu.N.Savchenko[13]提出了以下4种超空泡航行体的稳定模式(见图2):
1)双空泡流动方案
如图2(a)所示,其航速大约为 0~70 m/s。目前,许多专家学者均认为此种情形下其水动力中心位于质心之后,满足经典的运动稳定条件,此外,首尾压差也可以产生附加推力。此种设想,目前只是从理论上做了分析,没有具体的实验验证。
2)航行体尾部沿空泡内壁滑移方案
如图2(b)所示,其航速大约为 50~200 m/s。此方案,航行体尾部沿空泡内壁滑移,会产生升力,与空化器产生的升力一起保证航行体的平衡。此方案最大的缺陷是,其运动过程中滑移点受到很小的干扰,对航行体来说都致命。
3)航行体尾部与空泡边界撞击方案
如图2(c)所示,其航速大约为 300~900 m/s。此方案主要是由于模型初始攻角和角速度的扰动,从而形成的一种逐渐衰减的振荡模型。目前,已做过类似的数值模拟工作,结果证明此种振荡模式最终可以使航行体整体上保持稳定。
4)航行体尾部与空泡内气体及射流的相互作用方案
如图2(d)所示,其航速大约为 1 000 m/s 甚至更高。其主要是考虑高速运行时空泡末端的回射流作用力对航行体稳定性的作用。并且,许多学者认为,其产生的力可以利用近壁气动力学的方法来计算。

图2 超空泡航行体的稳定模式Fig.2 Schemes of body stabilization in supercavity
3.2水动力特性问题
对超空泡技术的研究,通常可分为理论研究、实验研究和数值模拟。早在 1946 年,Reichardt[14-15]进行了超空泡水动力特性的实验研究,并且得到了空泡形态的经验公式,验证了自然超空泡和通气超空泡具有相似的水动力特性。自此以后,许多学者进行了大量的实验和数值计算。其多集中于对流场的速度分布、空化器上的准定常水动力、航行体模型外形对空泡水动力特性的影响等,利用实验与计算相比较的方法得到了比较准确的结果,为超空泡水动力特性的研究做出了很大的贡献。
以往对潜艇的研究多数为单相流,在高压气吹除压载水舱的过程等才涉及均相流的 VOF 模型。而 VOF模型与超空泡技术所涉及的两相、甚至三相流的问题还不尽相同。尤其是在潜艇速度超过 100 m/s 以后,水的汽化会非常剧烈,水与水蒸气之间的质量运输、以及涉及到空气的多相流之间相互作用,并且此时流动过程中的高雷诺数、强湍流对超空泡的影响,如何利用 CFD 技术更好的模拟超空泡潜艇的水动力特性仍需要做进一步研究。
除此之外,如果潜艇可以发展到如图2(c)所示的稳定状态,此时水不能视为不可压缩流体,潜艇的操纵面也会随之振荡。从公开发表的文献来看,即便是对于已经成熟应用的超空泡鱼雷,其流体动力特性至今还没有得到解决。
4 潜艇自然超空泡仿真仿分析
4.1计算模型
仿真过程中,为了准确模拟空泡生长、溃灭过程中的质量传输,选取 Schnerr and Sauer[16]空化模型;涉及自然超空泡的多相流问题,选用均相流的 Mixture 模型;将以上计算模型与动量守恒方程、连续性方程耦合,同时利用文献[17]给出的 RNG k-ε 模型,对模型方程进行封闭。计算域分别采用速度入口、压力出口和固壁的边界条件。计算设置采用 SIMPLE 的压力-速度耦合项、标准的压力离散格式,其余均采用一阶迎风格式。
基于以上条件设置,对全附体的 Subof 模型在空化数为 0.039 968(v=100 m/s)时进行仿真计算。划分网格数为 3 001 684(见图3),质量在 0.25 以上。
4.2结果分析
对 Suboff 潜艇模型的计算结果如图4 和图5 所示。从图4 可明显看出,潜艇的头部与水有很大的沾湿面积,大大增加了潜艇航行过程中受到的阻力。需要设计合理的空化器并且对头部形状进行优化,减小与水的沾湿面积。从而也验证了超空泡潜艇头部使用空化器的必要性。

图3 Suboff 计算模型Fig.3 The calculation model of Suboff

图4 Suboff 潜艇模型仿真结果Fig.4 The simulation results of Suboff model

图5 尾翼对应潜艇后部区域仿真结果Fig.5 The simulation results of the submarine rear area
指挥室的前侧与水有较大的沾湿面积,由于指挥室高于艇体表面,会形成潜艇中纵面上的转动力矩,使潜艇稳定性降低;同时指挥室两侧形成对称的沾湿区域,增加了其稳定、上浮所需要的升力;指挥室后部形成了完全空泡区域。因此,需要对指挥室的形态或者其存在的必要性重新进行论证、设计。或者可以借鉴头部空化器,设计出指挥室的“空化器”,从而克服上述问题所产生的不利影响。
从图5 可知,由于尾翼的存在,对潜艇尾部超空泡的形成也会产生影响,上翼对应的潜艇后部形成了较大的汽水混合区域,左翼和右翼对应潜艇后部也有一定的汽水混合区域,下翼对应的潜艇尾部没有液相水存在。目前,潜艇使用的尾翼通常垂直于艇体表面,可以尝试通过改变翼型使后部的汽水混合区域延迟出现,进而保证尾部区域完全空泡形态。
5 结 语
超空泡技术在我国已备受关注。虽然成型的超空泡武器已不鲜见,但潜艇作为特殊的水下航行体,其超空泡技术的应用仍需根据其特殊用途、作战要求等进行重新配置、设计;其水动力特性以及超空泡航行体的稳定性等问题,都需要针对潜艇做细致、全面的研究。
基于空泡可以快速产生、发展并保持稳定的特性进行潜艇外形优化设计;强动力推进系统与矢量控制装置相结合的潜艇动力设备研发;快速控制通气量大小并且具有导流作用的“变形空化器”设计;空化器合理尺寸、外形设计问题;超空泡潜艇是否需要尾舵的论证;适用于潜艇超空泡流场模拟软件的开发;超空泡潜艇流场流体动力特性的研究;超空泡潜艇稳定性的问题等,有待进一步研究。
[1]KUKLINSKI R,HENOCH C,CASTANO J.Experimental study of ventilated cavities on dynamic test model[C]//Proceedings of the 4th International Symposium on Cavitation.California: California Institute of Technology,2001.
[2]陈春玉.反鱼雷技术[M].北京: 国防工业出版社,2006: 187-197.
[3]曹伟,魏英杰,王聪,等.超空泡技术现状、问题与应用[J].力学进展,2006,36(4): 571-579.CAO Wei,WEI Ying-jie,WANG Cong,et al.Current status,problems and applications of supercavitation technology[J].Advances in Mechanics,2006,36(4): 571-579.
[4]傅金祝.德国超空泡水中兵器的研究现状[J].水雷战与舰船防护,2005(4):12-17.
[5]黄加强.超空泡技术及其在潜艇上应用前景分析[J].舰船电子工程,2009,29(11): 23-25.HUANG Jia-qiang.Supercavitation technology and analysis of application perspective on submarine[J].Ship Electronic Engineering,2009,29(11): 23-25.
[6]SAVCHEENKO Y N.Control of supercavitation flow and stability of supercavitating motion of bodies[M]//VAN DEN BRAEMBUSSCHE.VKI Special Course on Supercavitating Flows.Brussels: RTO-AVT and VKI,2001.
[7]姜百汇,马春勋,刘乐华.国外超空泡技术及其应用[J].飞航导弹,2008(11): 20-24,31.
[8]宋伟峰.超空泡技术将改变海战模式[J].舰载武器,2003(2): 20-22.
[9]GOEL A.Control strategies for supercavitating vehicles[D].Florida: University of Florida,2002: 7-9.
[10]KUKLINSKI R,HENOCH C,CASTANO J.Experimental study of ventilated cavities on dynamic test model[C]//Proceedings of the 4th international symposium on cavitation.California: California Institute of Technology,2001.
[11]王茂励.超空泡航行体的数学建模与控制方法研究[D].哈尔滨: 哈尔滨工程大学,2008.WANG Mao-li.Mathematics modeling and control strategy of supercavitating vehicle[D].Harbin: Harbin Engineering University,2008.
[12]AHN S S.An integrated approach to the design of supercavitating underwater vehicles[D].Atlanta: Georgia Institute of Technology,2007.
[13]SAVCHENKO Y N.Investigation of high-speed supercavitating underwater motion of bodies[C]//Proceedings of NATOAGARD.Ukraine: NAS-IHM,1997.
[14]REICHARDT H.The laws of cavitation bubbles at axially symmetrical bodies in a flow[R].Ministry of Aircraft Production Reports and Translations,No.776,1946.
[15]KIRSCHNER I N,GIESEKE T A,KUKLINSKI R.Supercavitation research and development[R].Waikiki,HI Undersea Defense Technologies.2001.
[16]SCHNERR G H,SAUER J.Physical and numerical modeling of unsteady cavitation dynamics[C]//Proceedings of the 4th International Conference on Multiphase Flow.New Orleans,USA: ICMF,2001.
[17]胡青青.不同倾角下钝体入水后的超空泡流动的实验观察及数值计算[D].杭州: 浙江理工大学,2014.HU Qing-qing.Experimental observation and numerical calculation of supercavity flow of blunt body under different inclination angle into the water[D].Hangzhou: Zhejiang Science Technology University,2014.
Application analysis of submarine supercavitation technique
DU Pei-pei,XIAO Chang-run,LIU Yang
(Naval University of Engineering,Department of Naval Architecture and Ocean Engineering,Wuhan 430033,China)
Based on the current development of supercavitation technology,the necessity of supercavitation submarine is expounded.The basic principle of supercavitation technology is introduced.Based on the configuration of the supercavitation torpedo,the deformation cavitator is proposed.How to choose the propulsion of supercavitation submarine and control system are demonstrated.The function and the possible problems of stem rudder are analyzed.The stability problem of the supercavitation submarine is analyzed and the development of the supecrcavitation submarine is putted forward.The characteristics of viscous flow filed of SUBOFF model is calculated,the preconception of supercavitation submarine are putted forward.It is shown that,the wetted area are formed in the head of submarine,the front of the command room of submarine,both sides of the symmetry of the command room and the rear wing .Based on the above results,the improvement of the program is presented.Main work of submarine supercavitation in the future is discussed.
supercavitation submarine;deformation cavitator;CFD;stability;hydrodynamic forces;wet area
U661.1
A
1672-7619(2016)06-0037-05
10.3404/j.issn.1672-7619.2016.06.007
2015-07-29;
2015-09-06
杜佩佩(1991-),男,硕士,研究方向为潜艇超空泡技术。
猜你喜欢
流体机械(2022年8期)2022-10-13
大电机技术(2022年4期)2022-08-30
火箭推进(2022年2期)2022-05-14
上海交通大学学报(2021年8期)2021-09-02
疯狂英语·新读写(2021年6期)2021-08-05
数字海洋与水下攻防(2021年2期)2021-05-08
流体机械(2021年1期)2021-02-23
儿童故事画报(2020年7期)2020-08-03
小学科学(2020年6期)2020-06-22
创新作文(1-2年级)(2017年7期)2017-12-26