
移相干涉术及其相位解包新思路
2016-11-14 00:33吕绪浩
电子技术与软件工程 2016年18期
关键词:边缘检测
吕绪浩
摘 要
本文介绍了移相干涉术的工作原理,提出了一种基于边缘检测的相位解包新思路。包裹相位在干涉条纹交界处存在跃变,该思路利用边缘检测将包裹相位的边界提取出来,确认条纹级次,进而解包相位。该方法运算速度快,适合条纹较少的包裹相位图的快速解包。
【关键词】移相干涉 相位解包 边缘检测
移相干涉术是一种利用干涉图对光学元件进行测量的技术。该技术最早可追溯到20世纪60年代,而这项技术的真正发端是1974年Burnning等人用该技术实现对透镜的测量。之后,人们对移相干涉术做了深入的研究,各种移相方法及相位计算方法不断涌现。现如今,移相干涉术已成为光学干涉测量技术中一种常规方法,被广泛地应用于各个领域。
1 移相干涉术
通常干涉测量技术都是基于双光束干涉效应形成的。理论上双光束干涉场的光强分布表达式为:
Ii(x,y)=A(x,y)+B(x,y)cos[φ(x,y)]
其中(x,y)为干涉场中某点坐标,A(x,y)为背景光强,B(x,y)为调制光强,φ(x,y)为两相干光的相位差,与参考面和待测面之间的光程差有关。测量时,参考面被认为是理想的或已知的,所以φ(x,y)与待测面面形有关。
移相干涉术测量的本质:通过移相向干涉场中引入附加的相位,采集多幅干涉图,增加方程个数,求解出φ(x,y),实现测量。移相后干涉场光强分布表达式变为:
Ii(x,y)=A(x,y)+B(x,y)cos[φ(x,y)-δi] (i=1,2,3,...N)
其中i是移相步数,δi是第i次引入的相移量。为求得载有待测面信息的φ(x,y),至少需要三个方程,即N≥3。
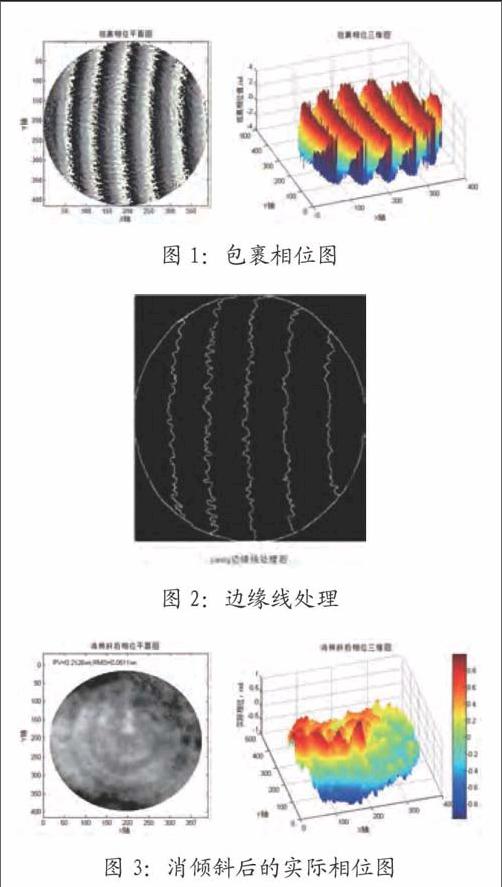
相位φ(x,y)的求取,即相移算法,是再现待测光学元件面形的关键。目前被广泛采用的算法有四步、五步定步长相移算法和Carre等步长算法。本文采用五步法,又名Hariharan算法,其对移相误差和探测器二次非线性误差都不敏感。求得的包裹相位如图1所示。
2 相位解包裹
设待测面总是光滑的,干涉图上的光强应该是连续变化的,相位场也应该是连续的。几乎所有的相位算法都是以反正切的形式给出的。数学上反正切的值域为(-π/2,π/2),编程时可根据分子、分母的正负符号,将值域扩大到(-π,π),Matlab库函数αtan2就可以实现这个功能。实际干涉条纹图含有多条明暗条纹,意味着相位变化超过2π。当真实相位超过2π时,运用反正切求解会有2kπ的相位丢失(k与条纹级次有关)。这种反正切运算得的、丢失真实相位信息的、限制在(-π,π)的相位称作包裹相位。为了获得待测面面形信息,必须在包裹相位加上丢失的相位,还原真实相位,这一过程称为相位解包裹。
一个包裹的相位图可以看成是由一个平滑的相位图被压包在(-π,π)之内得来。理想干涉图中含有多条条纹,每条条纹的相位变化在-π~π之间,总的相位变化大于2π。选某一基准点为0相位,将平滑相位图中大于π的相位减去2kπ,小于-π的相位加上2kπ,使所有的相位分布在(-π,π)区间内,即形成包裹相位图,其中k为整数。同一级次干涉条纹的k相同,不同级次k不同,相邻级次k相差1。
由以上分析不难发现如下规律:
(1)k和干涉条纹级次一一对应,可以直接作为条纹级次使用;
(2)处于同一级条纹的相位被压包在一个连续区域,不同级条纹的相位被压包在不同区域,相邻级次条纹交界处存在-π→π或π→-π的跃变;
(3)同一级条纹的相位被压缩在-π~π之间,加上2kπ即可恢复相位,k为该条纹的级次。包裹相位φ和解包相位ψ之间满足:
ψ=φ+2πk
相位解包的问题即转换成求解干涉条纹级次k的问题。相邻级次条纹交界处的相位存在跃变,跃变反映在二维图中就是一个明显的边界,可利用边缘检测将该边界提取出来。边界线将整个包裹相位图划分成若干个区域,每个区域对应一个干涉条纹级次k。
3 实验结果
对包裹相位场进行Canndy边缘检测。利用残差点定义识别残差点并标记,消除以残差点为中心3*3窗口内的边缘线。然后修剪边缘线分支,与边界形成连续、封闭的曲线,如图2所示。
确定全场点所属的干涉条纹级次k,残差点以外的相位数据加上相应的2kπ,残差点相位取邻域八点的平均值,得到解包后的相位。消倾斜后的相位图,如图3示。
本算法运算速度非常快,噪声点的相位误差不会蔓延,适合条纹较少的包裹相位图的快速解包,对条纹密集的相位解包经常形成错误的边缘线,不宜使用。
参考文献
[1]徐德珩,王青,高志山等.现行光学元件检测与国际标准[M].北京:科学出版社,2009.
[2]丁志华,王桂英,王之江.相移干涉显微镜中相移误差分析[J].计量学报,1995,16(04):262-268.
[3]孙衍国.电子散斑干涉技术及条纹图信息提取的研究[D].南京:南京航空航天大学,2011.
猜你喜欢
山东工业技术(2016年24期)2017-01-12
计算技术与自动化(2016年4期)2017-01-11
软件导刊(2016年11期)2016-12-22
电脑知识与技术(2016年27期)2016-12-15
软件导刊(2016年9期)2016-11-07
电脑知识与技术(2016年23期)2016-11-02
科教导刊·电子版(2016年18期)2016-07-18
电脑知识与技术(2016年13期)2016-06-29
科技视界(2016年9期)2016-04-26
科技视界(2016年3期)2016-02-26
电子技术与软件工程2016年18期