
基于STM32模拟智能导游机器人系统设计
2016-11-09 23:35蓝丽金潘运丹李君弋
数字技术与应用 2016年9期
蓝丽金 潘运丹 李君弋
摘要:本研究旨在为广大游客提供更加便捷、高效的智能导游服务,以STM32作为核心控制器,研究一套类人型的智能小型轮式机器人系统。该系统分为八个模块:主控模块、投币模块、语音模块、稳压模块、驱动模块、循迹模块、避障模块以及辅助模块,实现机器人根据游客要求提供最优参观景区线路,并进行全程智能解说服务。
关键词:机器人 导游 STM32
中图分类号:TP2442 文献标识码:A 文章编号:1007-9416(2016)09-0145-02
1 引言
智能机器人已经在工业、农业、医学、航天、甚至军事上等诸多领域的应用,很大程度上提高了生产效率,并代替人类完成高效、高精度、高危险的作业过程,解放了很大一部分的劳动力,智能机器人已为社会创造很大的价值。而服务机器人是当今智能控制领域的一个研究热点[1],智能移动机器人可以说是智能导游机器人的前身,其最早在60年代末期就开始了研究[2],作为各种类型机器人的基础技术平台,它能通过各种传感器、定位系统等来进行识别,从而去感觉周围的情况,了解自身所处的状态,实现在复杂的环境中去躲避障碍物自主向指定的目标运动,继而实现一定功能、完成一连串任务的系统。智能导游机器人融合智能机器人技术和导游服务,它将提高导游行业的工作效率,大大减轻导游工作负担,一定程度上代替人工导游工作,提高旅游行业的经济效益。
2 系统总架构
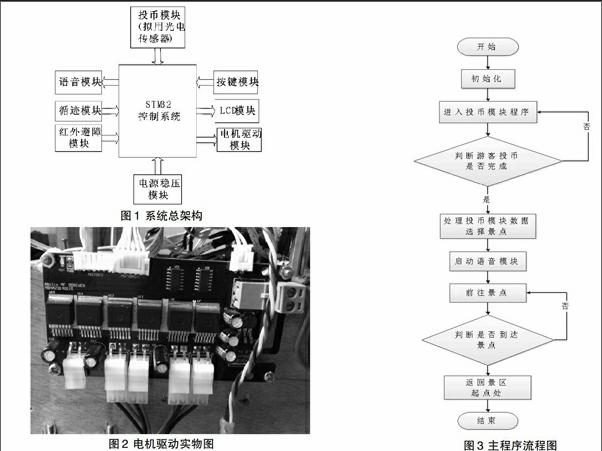
本设计研究的智能导游机器人系统可以分为九个模块:主控模块、电机驱动模块、光电循迹模块、红外避障模块、语音模块、模拟投币模块、按键模块、LCD模块、电源稳压模块。其中投币模块、按键模块、LCD模块和E18-D50NK光电传感器可合并为辅助模块。
智能导游机器人系统中,各个模块相辅相成,缺一不可。电源稳压模块为主控模块及其他模块提供稳定的电源,主控模块通过循迹模块采集路面线路信息,通过红外壁障模块采集障碍物等信息,然后再传递信号给电机驱动模块对电机进行操作,如此来实现导游机器人准确的行走和自动壁障等功能;语音模块通过主控模块可以实现简单的人机交互功能,解说景点的人文地理;投币模块在本设计是一个光电传感器模拟而成,以挥手来代表投币,游客投币结束后通过按键模块确认,然后将信号传给主控模块进行处理;LCD模块将主控模块处理的部分信息显示给游客观看。智能导游机器人系统总架构如图1所示。
3 系统主要模块设计与实现
本设计采用STM32f103ZET6微处理器作为核心控制器,根据需要使用该主控的接口引出来与外围设备进行连接。作为核心的主控模块,它是智能导游机器人的大脑,其主要功能是将各模块反馈的信息进行处理和控制,如避障模块检测到障碍、循迹模块检测到岔路口或者景点后,反馈给主控,主控根据程序命令调节电机驱动模块和语音模块,使得机器人可以进行转弯、调速及解说等功能。
3.1 电机驱动模块
该模块是两个部分组成的,一个是驱动模块,另一个是电机;其主要功能是为智能导游机器人通过驱动模块对电机进行调速控制,从而控制机器人的运行以及对特殊路面情况的相应动作[3]。
(1)本设计电机采用4个28JX5K19G直流减速电机。直流减速电功率可达95KW以上,能耗低,节省空间,有较大的力矩。主控制模块采用PWM调速法通过驱动模块控制电机的转速,改变一系列频率输出固定方波的占空比,从而改变加在电机的平均电压,通过功率放大器驱动电机,可改变电机的转速,实现机器人的前进、后退、转弯等功能。
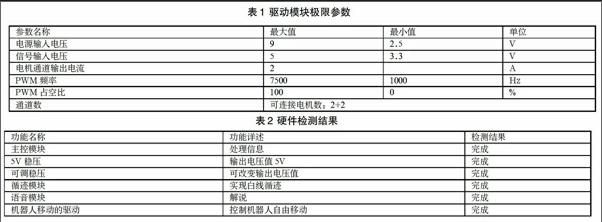
(2)本设计驱动模块采用的是Abilix驱动器,该模块是主控系统和电机的连接纽带,主控通过驱动模块控制电机的正反转以及改变与驱动模块连接的通道口电平的高低来控制电机的运行状态。如图2所示为电机驱动实物图。表1所示为驱动模块的极限参数。
3.2 循迹与避障模块
(1)设计中光电循迹模块主要由16个光电二极管、8个光敏三极管、 2个LM339M芯片、16个LED灯组合而成[4]。其功能是对白线进行识别,使探险游机器人可以按规划好的路线前进到达方案所设计的目的地,并能分辨交叉路口以便按程序选择路径进行调整。
该模块主要采用的两个元件是3DU5C硅光敏三极管、LM339电压比较器。
(2)避障模块采用E18-D80NK光电传感器,它是一种漫反射式光电传感器,集发射与接收于一体[5],其主要目的是实现对障碍物的识别。
本次设计需要实现的避障功能有:对路障的识别、对陡坡的识别以及在特定情况下帮助循迹模块识别路径和确定车身位置,按其实现不同功能的需要,安置不同位置的传感器。
4 软件分析及硬件测试结果
4.1 主程序流程图
主程序主要作用是对外部设备进行初始化,并等待游客投币后,开始判断投币数量,确认完毕后选择所去景点的路线,然后启动语音模块,带游客去景点,到达景点解说完毕后自动回到起始点。本设计的主程序流程图如图3所示。
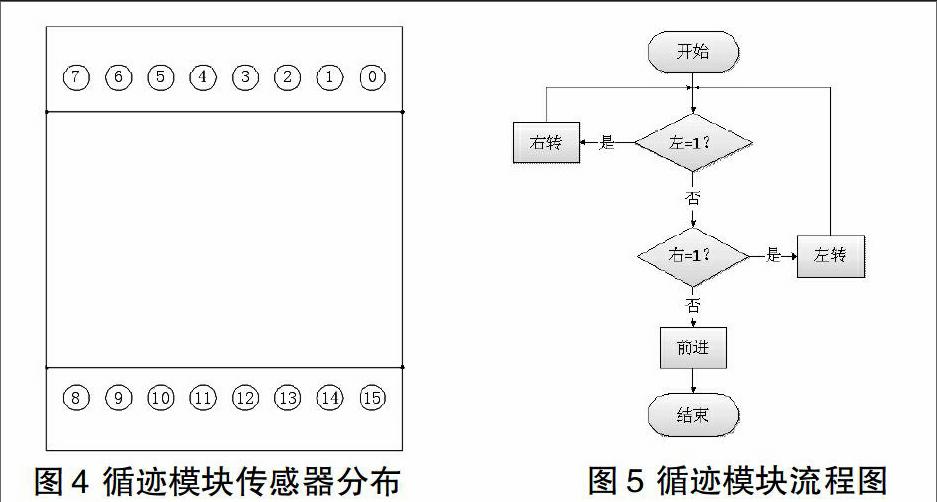
4.2 循迹模块序流程图
为了实现其识别线路的功能,2个循迹模块分布于智能导游机器人底盘下方,为了循迹模块编程所需,特将循迹模块的光电传感器定义为0至15的编号。如图4所示为循迹传感器分布图。为了循迹模块编程程序流程所需,设0至2的光敏传感器响应向前右,5至7的光敏传感器响应向前左,8至10的光敏传感器响应向前左,13至15的光敏传感器响应向后右,对于白色直线的循迹程序流程图如图5所示。
4.3 硬件测试结果及分析
该设计硬件主要实现了五个模块功能,即主控模块、稳压模块、循迹模块、语音模块与机器人移动的驱动。测试时主控模块先在未通电时检查芯片及其他外设焊接是否短路。通电后开始检测是否可以下载程序,当程序可以成功下载则主控模块就已经检测完毕。硬件检测表如表2所示。
5 结语
本设计研究的是类人型的模拟智能导游机器人系统,其采用STM32为主控芯片,通过模拟投币模块、语音模块、循迹模块、避障模块等八个模块完成了对机器人的智能控制,实现游客投币确认后自动带领其参观景区,游客通过语音模块实现与机器人的交流对话,并为游客进行解说服务。
参考文献:
[1]杨志鹏.导游机器人的设计与实现[D].浙江大学,2010.
[2]Nilsson NJ.A mobile automation:An Application of Artificial Intelligence Techniques.Proc.of IJCAI reprinted in Autonomous Mobile Robots:Control[J].Planning and Architecture,1969.2(1):233-239.
[3]曹其新,张蕾.轮式自主移动机器人[M].上海交通大学出版社,2012-1-1.126-132.
[4]刘波江.玩转机器人-巡线竞速机器人的原理与制作[M].苏凤凰教育出版社,2014-07-01.98-101.
[5]俞云强.传感器与检测技术[M].高等教育出版社,2013-07-01.56-59.
猜你喜欢
军事文摘(2023年14期)2023-08-06
疯狂英语·初中版(2022年11期)2022-05-30
奇妙博物馆(2021年2期)2021-03-18
少先队活动(2020年10期)2020-10-28
