
基于无线传感网的城市智能交通车辆定位技术研究
2016-11-09 22:50金欢
数字技术与应用 2016年9期
金欢
摘要:在城市智能交通系统中,行驶车辆定位成为了关键问题。无线传感网是信息获得和数据处理的一种新模式,其节点定位技术为车辆定位提供了支撑。本文提出了基于无线传感网的城市智能交通车辆定位技术,采用TDOA技术和最小二乘法对行驶车辆进行初始定位,再利用改进的粒子滤波算法提高定位精度得到最终位置。实验证明,该方法可有效的提高定位精度且投入成本低。
关键词:无线传感网 城市智能交通 车辆定位
中图分类号:U495;TP212.9;TN929.5 文献标识码:A 文章编号:1007-9416(2016)09-0073-01
随着科技技术和工业技术的发展,汽车保有量迅速增长,城市交通压力日益加大。城市智能交通系统(ITS)中的车辆定位与身份识别倍受关注,运动中的车辆定位为ITS中的关键问题。无线传感网(WSN)是由传感器、数据处理和通信单元组合节点以自组网的形式构成的网络,是一种不依赖中心节点的全分布系统。
针对基于WSN的ITS系统,本文中提出通过TDOA技术获得车辆原始位置信息,利用最小二乘法处理数据。初次定位获得车辆位置粗略信息,再利用改进的粒子滤波算法进行再次定位。实验证明,本文提出的方法成本较低,获得车位车辆位置信息精度较高。
1 智能交通系统模型
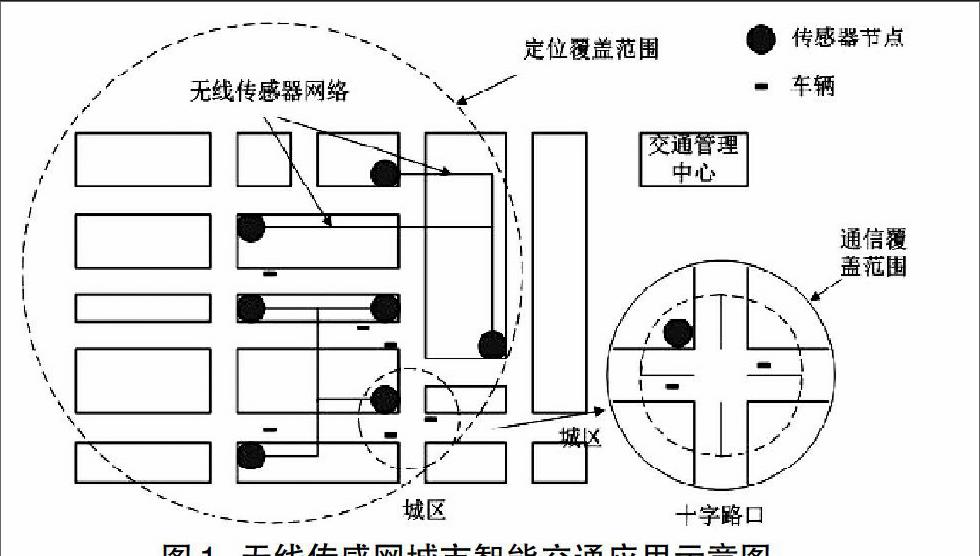
在交通环境中设置大量传感器节点,对道路中的车辆进行实时监控,所获得的信息上传到控制中心。基于无线传感网的城市智能交通车辆定位系统如图1所示,该系统由控制中心、通信传感器节点和车载传感器组成。道路上行驶通过自带车载传感器以固定频率广播信号,请求路侧通信传感器节点发送坐标信息,当接收到返回的坐标信息和RSSI值后,估算粗略坐标,然后再利用改进的粒子滤波算法计算出准确坐标值,并将坐标值发送到控制中心,中心根据获得的信息进行调度和决策。
2 行驶车辆粗略位置测量
不同的路侧通信传感器得到行驶车辆的广播信号存在时间差,通过路侧通信传感器的坐标与该时间差,采用TDOA定位技术得到车辆位置信息。根据时间差和电磁波传播速度可得到距离差,将该距离差代入式(1),可计算出行驶车辆的粗略位置信息。
基于信号强度指示RSSI和TDOA技术的方法,在获得行驶车辆的初始坐标后,车辆自带车载传感器利用粒子滤波算法对车辆定位,由于经典粒子滤波算法样本存在退化情况,为防止发生样本退化,采用对样本重新采样,并改进设计概率密度函数等,从而对粒子滤波过程进行优化。
通过实验证明,在图1的环境下,将本文提出的改进粒子滤波算法与经典粒子滤波算法实验对比,比较目标车辆x、y坐标的平均定位误差,本文提出的改进的粒子滤波算法的定位精度优于经典算法。
4 结语
本文提出的基于无线传感网的城市智能交通车辆定位技术,首先采用TDOA定位技术获取行驶车辆的初始位置,再增加RSSI值权重计算,获得车辆初次定位的粗略坐标;通过改进的粒子滤波算法对行驶车辆位置再次定位,完成以上步骤得到车辆准确的位置。实验证明,本文所提出的方法有效的提高了城市智能交通车辆定位的精度,且硬件投入成本较低。
参考文献
[1]王冬,吴蒋.基于TDOA和改进粒子滤波算法的智能交通系统运行车辆定位[J].计算机测量与控制,2014,22(4):1196-1198.
[2]杨志,胡文红.基于云计算视觉技术的肇事车辆定位系统设计[J].计算机测量与控制,2013,21(3):770-772.
[3]陈娟娟.基于GIS与GPS的车辆定位监控系统[D].天津:天津大学,2012.
[4]李文娟.车联网中车辆定位及其优化技术研究[D].南京:南京邮电大学,2013.
