激光主动照明光学系统设计
2016-11-09 05:36:28申军立
中国光学 2016年3期
刘 韬,胡 玥,董 健,申军立
(中国科学院 长春光学精密机械与物理研究所,吉林 长春130033)
激光主动照明光学系统设计
刘韬*,胡玥,董健,申军立
(中国科学院 长春光学精密机械与物理研究所,吉林 长春130033)
为提高跟踪测量系统对暗弱目标的探测能力,设计一套自动化激光主动照明光学系统,对跟踪测量视场范围进行主动辅助照明。该系统在0.2~5 km距离处的照明直径均为10 m,计算出其在-20 ℃及+45 ℃的温度调焦量,照明仿真结果表明系统照明不均匀性<15%。通过研究系统像差对照明均匀性的影响,以及对设计的调光组进行分析,得到调光组移动量与照明距离之间的理论关系,表明自动调节调光组位置即可实现不同照明距离处的均匀照明。设计和分析结果表明,该主动照明系统能够自动调节调光组位置,实现跟踪测量视场内的均匀照明,有利于跟踪测量系统对于暗弱目标的探测。
激光主动照明;自动化;照度均匀
1 引 言
随着激光技术、成像技术和计算技术的日趋成熟,光电跟踪测量设备需要更好地适应复杂背景的需求。对于夜晚或低能见度条件的远程小暗目标,传统被动测量成像系统即使使用高灵敏的微光探测相机也无法提供足够的对比度与分辨率。主要原因是返回信号的能量很弱,或者背景干扰非常严重,有用的信号被干扰光、背景光所淹没,很难识别发现目标[14]。
增加激光主动照明系统是提高返回信号能量的有效手段。利用激光的高亮度、高方向性和高单色性等特点,对远、小、暗目标或其局部进行照射,以增加返回信号的能量,采用距离选通技术有效抑制后向散射等背景辐射的影响,获得远、小、暗目标的高分辨,高对比图像,实现跟踪探测功能[14]。
目前,国内外已有多家单位将激光主动照明成像系统应用于实际工程中,如加拿大Albedos和Elviss激光主动成像系统等[14]。同时,国内外对激光主动照明技术的研究主要集中在距离选通技术及探测距离等领域,并未对不同照明距离处照明亮度的一致性及均匀性的问题进行分析,而从目前激光主动成像系统来看,存在目标照度不均匀及照度动态范围过大的问题[14]。
本文结合工程实际需要,针对跟踪探测系统所选用的相机存在动态范围小及灵敏度低的缺点,要求所设计的激光主动照明光学系统对跟踪测量视场范围进行主动辅助照明,且实现在0.2~5 km不同距离范围内,照明区域均为直径为10 mm的圆形区域。配合激光主动测距系统自动实现对不同照明距离下的照射区域照度相对均匀一致。
由于激光主动照明系统的发射激光和回波信号均在大气中传输,不同远近照明区域的大气背景辐射、透过率、能见度及湍流等特性有所不同,照明系统结合大气能见度分析仪及激光测距系统,可针对不同的大气环境及照明距离,调节激光器的发射功率,以保证照度相对均匀一致,其详细技术方案本文不赘述。本文着重论述激光主动照明系统的光学系统设计、照明结果仿真及调光分析等部分。
2 光学系统设计
2.1设计指标
激光主动照明系统如图1所示,它主要由大功率半导体激光器、匀化光纤、照明光学系统、激光测距系统、能见度分析仪及控制计算机组成。
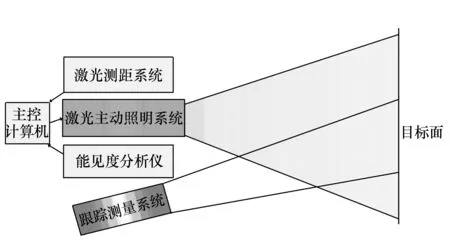
图1 激光主动成像系统示意图 Fig.1 Schematic diagram of laser active imaging system
激光光源直接输出的光功率密度为高斯分布,需要进行匀光处理,使用传统光棒匀光混合效果不佳,且光功率损耗比较大。光纤具有可弯曲、可多光纤合束、可长距离传输、光功率损耗低等诸多优点,故选取光纤作为激光混光和中继传输器件[14]。本文采用多模石英光纤,纤芯直径径为D1=400 μm,NA=0.22,其内部包含的模数非常大,其出射光完全可以用几何光学近似处理。所以在此种情况下,光纤完全可以实现对激光光束的匀光处理。
鉴于跟踪测量系统所选用探测相机的波段需要,所选用半导体激光器功率为0~50 W连续线性可调,工作波段为(808±3) nm,并支持远端自动控制。
为保证对0.2~5 km不同远近处目标,系统的照明区域均为直径为10 m的圆形区域,激光光源经照明光学系统后其发散角度θ应为2 mrad(5 km)~50 mrad(0.2 km)可调。系统的最小发散角度θ5 km由光纤直径D1与系统焦距f共同确定,如式(1)所示:
(1)
由式(1)可知,系统焦距为200 mm,又由光纤数值孔径NA=0.22可知,系统口径为D=88 mm。当照明距离为5 km时,光纤出射端口应位于照明光学系统的物方焦点处,当照明距离小于5 km时,通过调节光纤出射端口与照明光学系统之间的间隔L来控制系统的孔径角θ1,从而增大系统照明发散角度θ。照明距离与照明孔径角关系如表1所示。
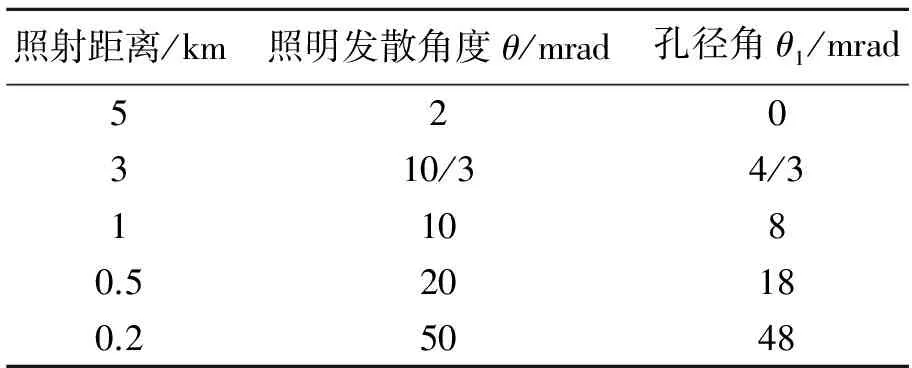
表1 照明距离与照明孔径角关系
2.2系统结构型式
系统结构型式如图2所示。照明光学系统共由5片镜片组成,其中第1片与第5片玻璃均为石英材料的平板保护玻璃,第2片到第4片透镜用于调整照明发散角,其材料依次为H-ZK9A、H-ZK9A及H-ZF7LA。第1片石英玻璃保护系统内部,防止污损。第5片石英玻璃保护光纤头,防止光纤头损坏。5片镜片表面均镀增透膜,保证单面透过率为99.4%,考虑玻璃材料透过率的影响,最终系统的总透过率为90.9%。在激光器满功率50 W照射的前提条件下, 不考虑元件导热及散热问题,系统所能承受的最大工作时间至少为470 s,满足系统对工作时间的要求。温度调焦与照明发散角调整部件共用一组镜片作为调光组。系统通过移动中间3片透镜的方式实现系统的照明控制功能。系统设计时考虑到装调与检测的便利性,可调整调光组位置,使系统RMS检测结果<1/40λ(检测波长为λ=632.8 nm)。
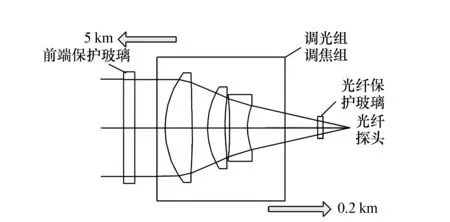
图2 激光主动照明光学系统结构图 Fig.2 Structure of laser active illumination system
2.3照明仿真分析
利用LightTools软件模拟了不同距离处被照射面的照度情况,结果证实各距离处的照度比较均匀。不同距离处,照明仿真分析结果如图3所示。经过照明仿真分析,在不考虑系统透过率及大气影响的前提条件下,不同距离处调节发散角后主动照明情况分析结果如表2。其中对均匀照明区域的照明均匀性的计算方法如式(2)所示:
(2)
式中,Lmax为照度最大值,LA为照度平均值,N为计算结果的百分值[14]。表2中均匀照明半径的边界点照度为中心区域照度的95%,这样认为边界点之内的照明区域为均匀的。由图3及表2可知,不同照明距离处照明不均匀性<15%,且平均照明功率变化在30%范围内,满足跟踪测量系统对照度一致性的要求。

表2 不同距离处照明分布情况
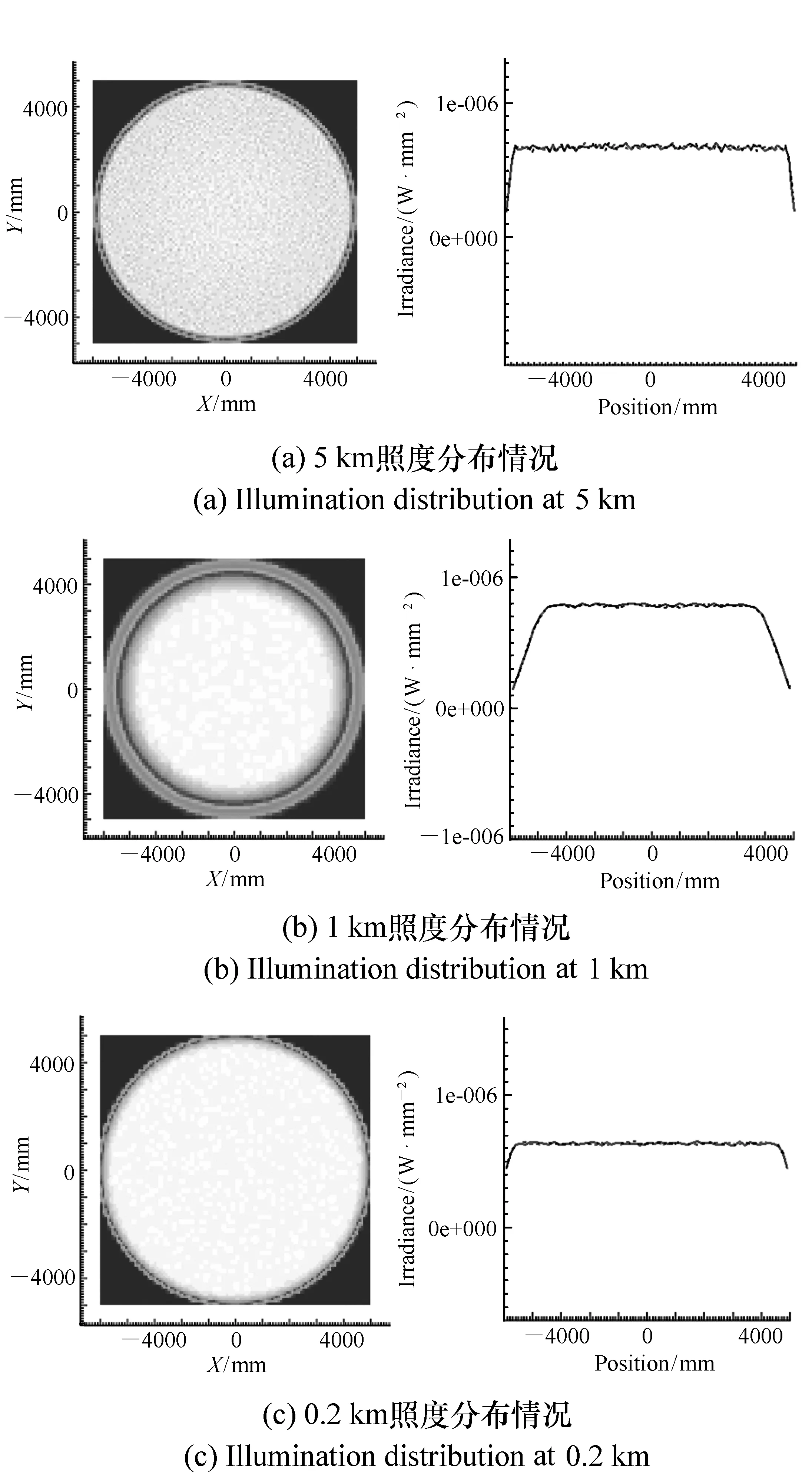
图3 不同距离处照度分布情况 Fig.3 Illumination distribution at different distances
2.4温度调焦分析
由于系统在不同温度下工作,若不进行温度调焦,则会引起照明发散角的变化,从而影响被照明处的照度分布。通过分析,系统所使用的机械固定件为钢,温度调焦量情况如表3所示,变化量在+0.15 mm(45 ℃)到-0.245 mm(-20 ℃)之间。可通过调节调焦组移动量实现温度调焦控制基本消除温度变化的影响,说明系统具有较好的温度适应性。
表3 不同距离处温度调焦情况
3 调光组分析
调光组所选用的步进电机单级推力为84 N,步长为0.012 1 mm,频率为800 pps,所选用电位器满程10圈,最大行程为24.2 mm。以5 km处调焦组位置为起点,照明距离调焦的调焦量为0 mm(5 km)~21.7 mm(0.2 km),总调焦量(距离调光+温度调焦)为-0.245 mm(5 km,-20 ℃)~21.807 mm(0.2 km,45 ℃),取整后总行程为-0.5~22 mm,因此总行程为22.5 mm<24.2 mm,调焦总时间为2.16 s,满足行程与精度的要求。激光主动照明光学系统中间3片镜片的重量分别为390.895 g、155.888 g、163.290 g,共计710.073 g,考虑移动镜筒重量及摩擦系数,移动镜筒所需的最大推力约为15.5 N<84 N,满足电机推力要求。
3.1调光组移动量与照明距离的关系
激光主动照明系统根据不同的照明距离,准确移动调光组,保证照明区域的大小一致且照度均匀,不会因为距离的改变而发生明显的明暗变化。由激光测距系统测出所需照明距离为d(m),不同距离处的照明孔径角为θ2,光纤出射端口孔径角为θ1,不同距离处系统的放大倍率为β,光纤出射端口对应照明系统的物距和像距分别为l,l′,照明系统焦距为f′,由高斯公式及几何关系可推出,调光组移动量x与照明距离d关系如下式(3)~(6)所示:
(3)
(4)

(5)
(6)
式中,θ1≈0.221 8 rad,f′=200 mm,由上式可推出调光组移动量x与照明距离d之间关系如式(7)所示:
(7)
由于像差等因素理论计算所得调光组移动量x会略有偏差,根据CODE V仿真结果与理论计算进行比对如表4及图4所示。

表4 理论调光组移动量与CODE V仿真结果对比表
理论移动量的偏差值小于电机的一个步长,偏差值在5 km时最大,根据LightTools仿真结果,该偏差值会使5 km处均匀照明半径变化约1%以内,满足跟踪探测对照明均匀性及照度一致性的要求,说明该理论曲线能够实现根据激光测距系统反馈的距离值d自动控制调光组移动量,且满足对照明均匀性的要求。
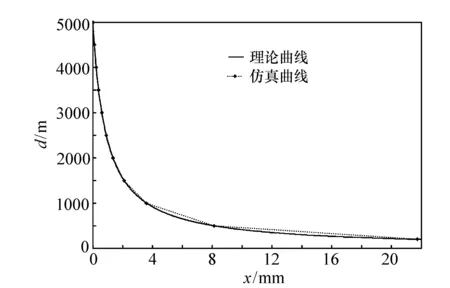
图4 调光组移动量与照明距离关系曲线 Fig.4 Relation curves between the dimming group movement and illumination distances
3.2系统波像差与照明均匀性的影响
由于照明光学系统各种像差的存在,目标照度分布会出现不均匀现象,影响系统的跟踪与测量。波像差是影响照明均匀性的主要原因,波像差的大小通常用其均方根值(RMS值)表示[14]。各照明距离对应系统RMS值如图5所示。
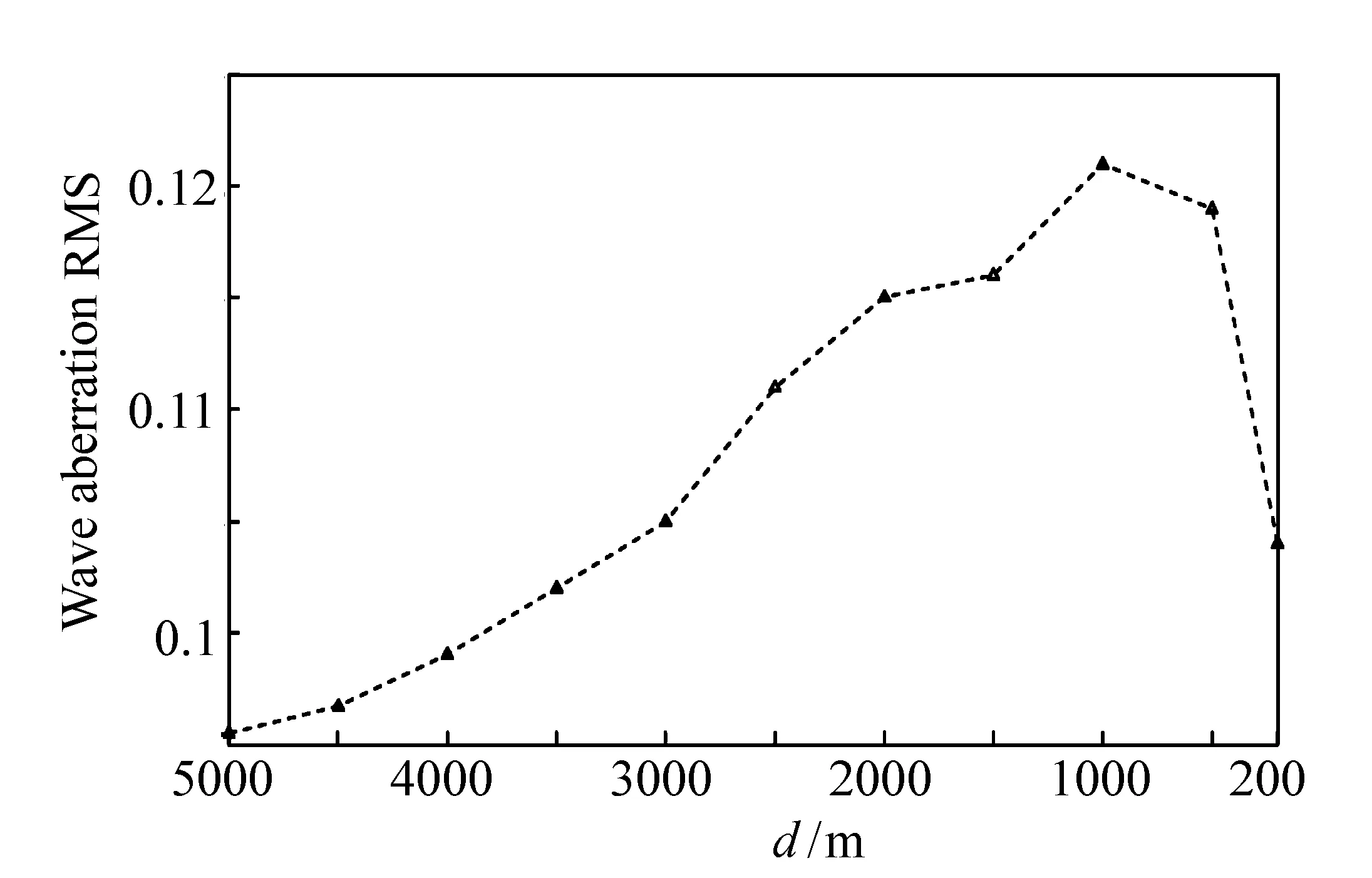
图5 各照明距离对应系统波像差RMS值 Fig.5 Wave aberration RMS at different illumination distances
由图3、图5及表3可知,在调光组整个运动过程中,照明光学系统的波像差RMS值<1/5λ,其中λ=808 nm。系统波像差RMS最大值出现在照明距离为0.5~1 km附近时,而此时系统照明的最大不均匀性为14.7%,仍满足跟踪测量系统对照明均匀性的要求。照明距离为0.78 km时,照明仿真结果如图6所示,其照明不均匀性仍满足要求,均匀照明直径为7.5 m。
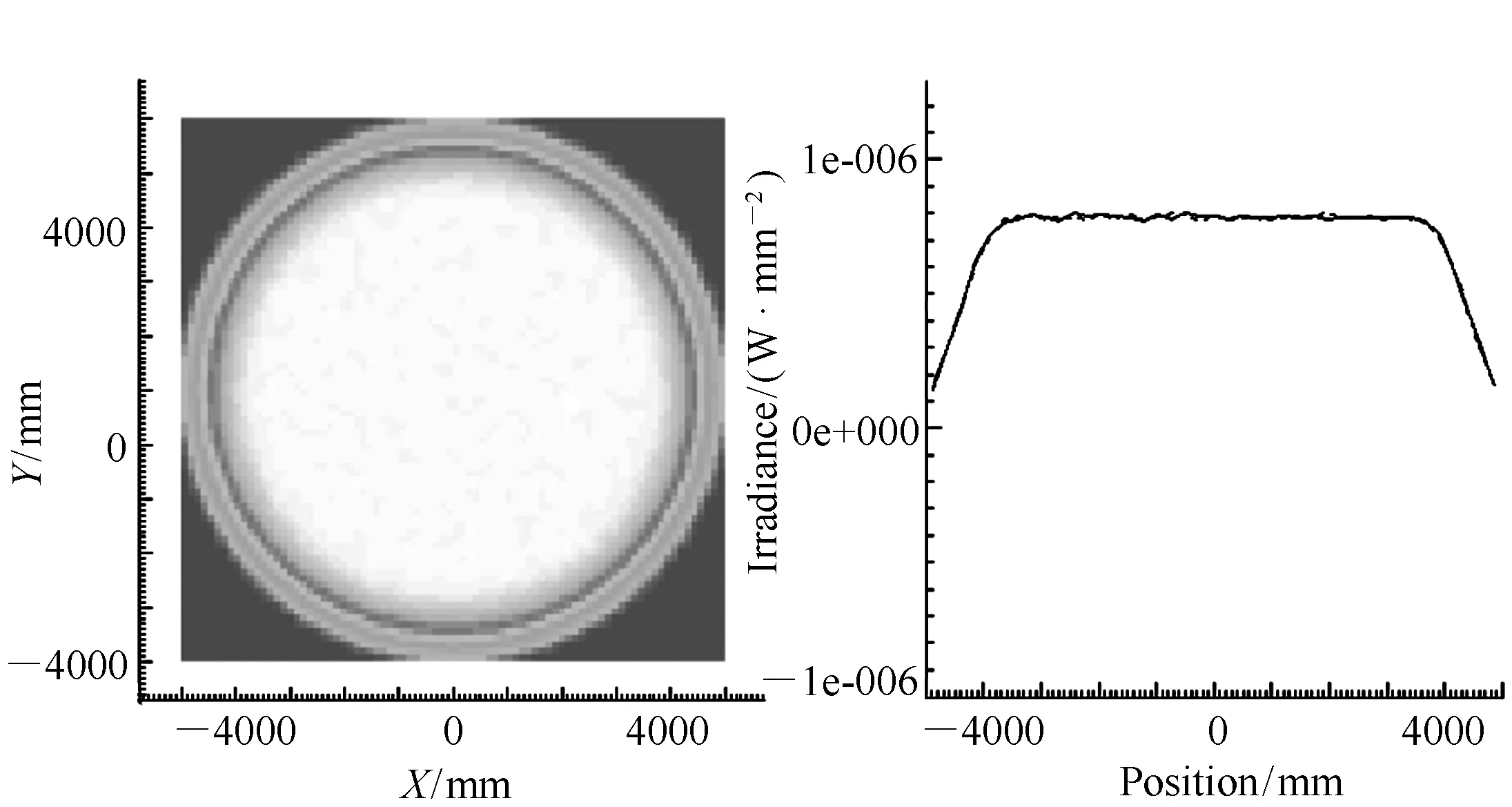
图6 照明距离为0.78 km处照度分布情况 Fig.6 Illumination distribution with the illumination distance of 0.78 km
3.3系统公差分析
通过CODE V对系统的公差进行分析,分析的公差限为CODE V默认值,得到如图7所示公差分析结果。图7表明装调检测位置系统的MTF高于0.89的概率大于90%,因此该系统满足实际加工装调的要求。结合CODE V分析与系统实际加工与装调能力,得出装调后系统的整体波像差RMS值将会小于1/5λ(λ=632.8 nm),其中材料误差、厚度、间隔及半径误差拟用调光组的移动会得到补偿改进,而部分元件的楔形、倾斜及偏心的公差虽然要求比较严格,但仍然在现有加工和装调技术范围内。
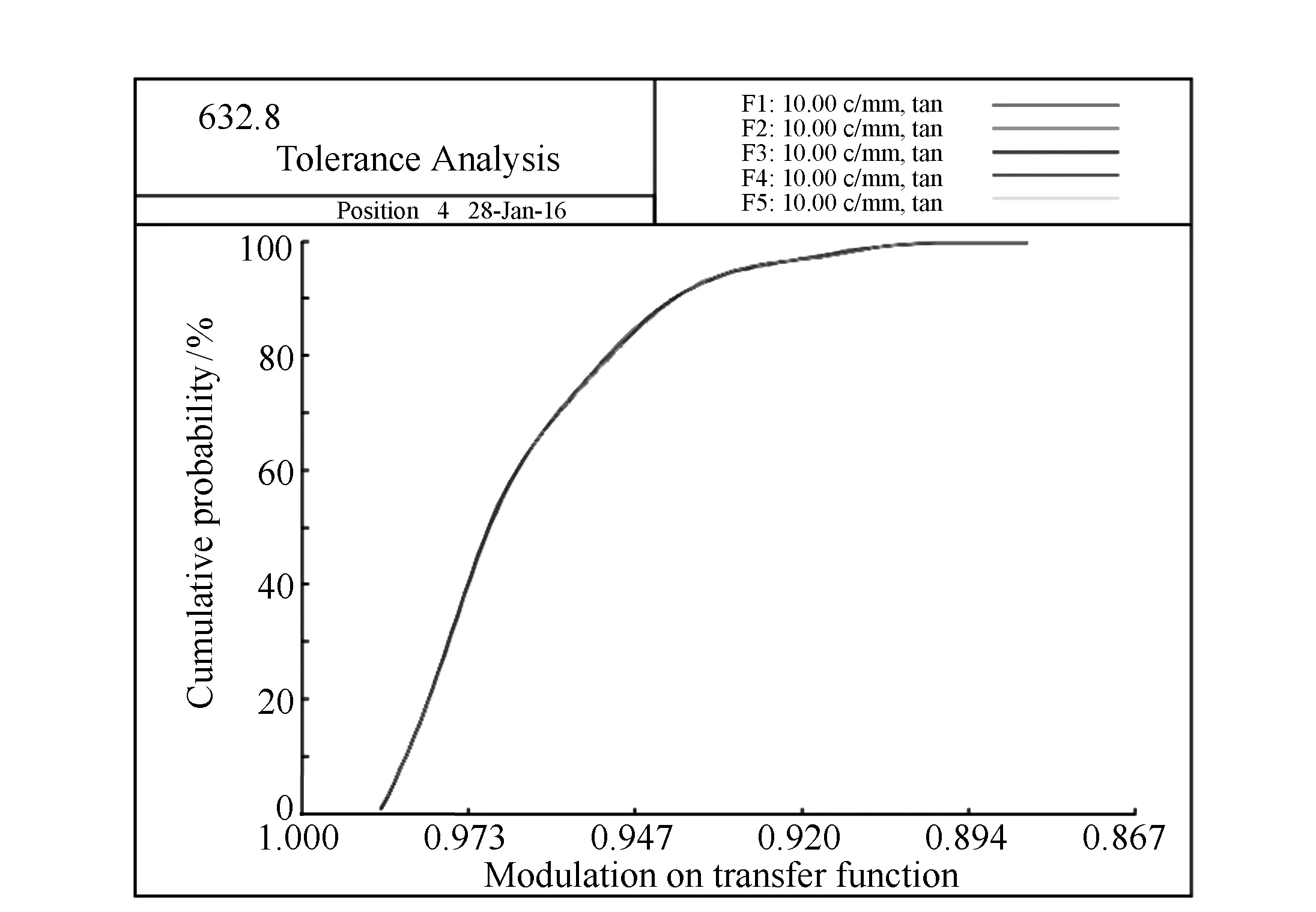
图7 检测位置公差分析后MTF变化情况 Fig.7 MTF change of test position after tolerance analysis
实际装调时需使用工作波长632.8 nm的干涉仪进行实时检测,调节调光镜筒的位置(调光组移动量为0.6 mm),检测当系统波像差最小时,调光组的位置,设为标志位,完成系统装调。通过干涉仪检测确定装调后实际系统零位位置,最大程度降低了因实际装调误差而引起的照度不均匀的问题。
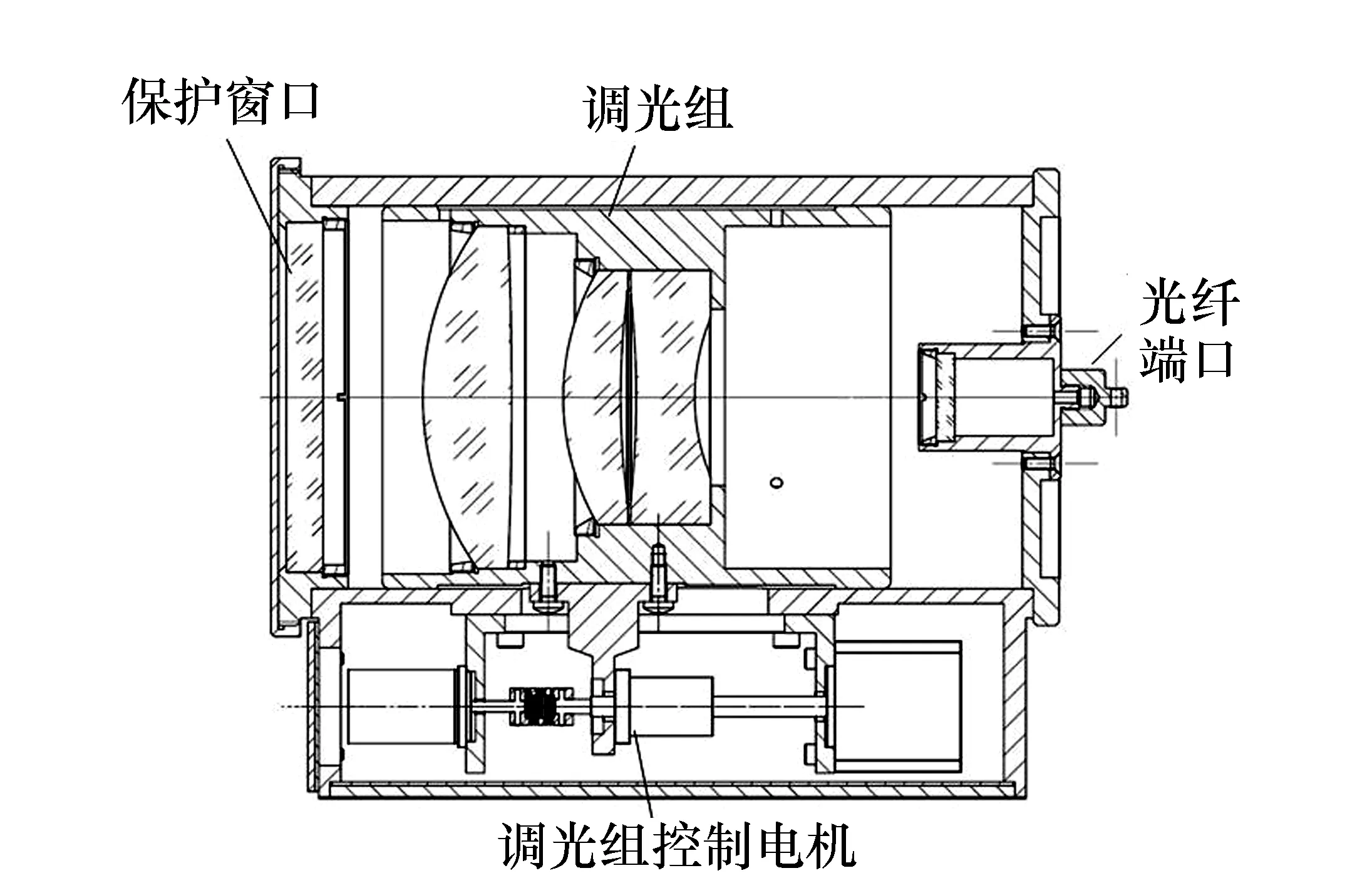
图8 照明系统结构 Fig.8 Mechanical structure of illumination system
4 结 论
本文的激光主动照明光学系统设计中,为了保证不同照明距离处照度一致性的要求,将匀化光纤、激光测距系统及照明光学系统联合使用,分析了温度调焦量的大小,给出了系统调光组移动量与照明距离之间的理论关系,实现了0.2~5 km处照明直径均为10 m且照度相对均匀一致自动控制。仿真及分析结果表明此照明距离范围内系统的照明不均匀性小于15%,满足跟踪探测系统对于照明均匀性的要求。
[1]赵建川,王弟男,陈长青,等.红外激光主动成像和识别[J].中国光学,2013,6(5):795-802.
ZHAO J CH,WANG D N,CHEN CH Q,etal.. Infrared laser active imaging and recognition technology[J].ChineseOptics,2013,6(5):795-802.(in Chinese)
[2]朱海波,张晟翀,杨海波.激光主动成像系统设计[J].红外与激光工程,2008,37(S3):93-94.
ZHU H B,ZHANG SH CH,YANG H B. System design of laser active imaging[J].InfraredandLaserEngineering,2008,37(S3):93-94.(in Chinese)
[3]董明礼,张晶,李银柱,等.激光辅助照明主动红外成像研究[J].红外技术,2006,28(2):91-94.
DONG M L,ZHANG J,LI Y ZH,etal.. Study on active IR imaging with laser illumination[J].InfraredTechnology,2006,28(2):91-94.(in Chinese)
[4]李波,王挺峰,王弟男,等.激光大气传输湍流扰动仿真技术[J].中国光学,2012,5 (3):289-295.
LI B,WANG T F,WANG D N,etal.. Simulation of laser beam propagation through turbulence[J].ChineseOptics,2012,5(3):289-295.(in Chinese)
[5]王森,潘玉寨,刘一,等.提高雾天激光主动成像图像质量的研究[J].红外与激光工程,2013,42(9):2392-2396.
WANG S,PAN Y Z,LIU Y,etal.. Image quality improvement of laser active imaging in fog[J].InfraredandLaserEngineering,2013,42(9):2392-2396.(in Chinese)
[6]庞春颍,张涛.激光主动成像系统信噪比模型的研究[J].光学 精密工程,2008,16(2):319-324.
PANG CH Y,ZHANG T. Signal-to-noise ratio model of laser active imaging system[J].Opt.PrecisionEng.,2008,16(2):319-324.(in Chinese)
[7]徐效文.应用激光主动成像探测小暗目标的技术研究[D].长春:中国科学院长春光学精密机械与物理研究所,2004.
XU X W. Study on the technologies for detecting small dark target with laser active imaging[D]. Changchun:Changchun Institute of Optics and Fine Mechanics and Physics, Chinese Academy of Sciences,2004.
[8]郭惠超,孙华燕,范有臣.大气条件下距离选通激光主动成像技术发展现状[J].激光与光电子学进展,2013(10):25-35.
GUO H CH,SUN H Y,FAN Y CH. Development status of range-gated laser active imaging technology under atmospheric condition[J].Laser&OptoelectronicsProgress,2013(10):25-35.(in Chinese)
[9]王锐.激光距离选通成像门宽对图像信噪比影响[J].中国光学,2015,6 :951-956.
WANG R. Effect of gate width of laser range gating imaging on image SNR[J].ChineseOptics,2015,6:951-956.(in Chinese)
[10]高杨,赵兴海,赵翔,等.石英光纤的传能效率、损伤阈值和损伤积累效应研究[J].探测与控制学报,2009,31(1):1-4.
GAO Y,ZHAO X H,ZHAO X,etal.. A study on power delivery efficiency laser,laser induced damage threshold and damage accumulation effect of silica fiber[J].J.DetectionControl,2009,31(1):1-4.(in Chinese)
[11]王景奕,毕瑞丰.光纤耦合技术在红外激光照明器上的应用[J].科学技术与工程,2014,14(11):200-205.
WANG J Y,BI R F. Optical fiber coupling technology in infrared laser illuminator[J].ScienceTechnologyandEngineering,2014,14(11):200-205.(in Chinese)
[12]朱云青,徐明泉,张振远,等.光纤照明系统的光斑匀化技术研究[J].玻璃纤维,2015,2(2):29-34.
ZHU Y Q, XU M Q,ZHANG ZH Y,etal.. Study on light spot homogenization in fiber-optic illumination system[J].FiberGlass,2015,2(2):29-34.(in Chinese)
[13]王英顺,连洁,高尚,等.近红外激光照明器均匀性评价技术研究[J].光子学报,2013,42(3):258-261.
WANG Y SH,LIAN J,GAO SH,etal.. Illumination uniformity of near infrared illuminator[J] .ActaPhotonicaSinica,2013,42(3):258-261.(in Chinese)
[14]牛磊,李湘宁,隋峰.新型激光投影显示照明系统设计[J].光电工程,2015,42(3):77-82.
NIU L,LI X N,SUI F. The illumination system design for new laser projection display[J].Opto-ElectronicEngineering,2015,42(3):77-82.(in Chinese)
[15]张培茗,陈家壁,杨雪,等.用于人眼波前像差测量的照明系统设计[J].光学 精密工程,2009,17(9):2084-2090.
ZHANG P M,CHEN J B,YANG X,etal.. Illumination system design for ocular wavefront aberration measurement[J].Opt.PrecisionEng.,2009,17(9):2084-2090.(in Chinese)
Design of laser active illumination optical system
LIU Tao*, HU Yue, DONG Jian, SHEN Jun-li
(Changchun Institute of Optics,Fine Mechanics and Physics,ChineseAcademyofSciences,Changchun130033,China)*Correspondingauthor,E-mail:liutaosd123@126.com
In order to improve detection ability of tracking system for the dim target, a set of automatic laser active illumination system is designed for actively illuminating the view field of tracking and measurement. The illumination diameter is always 10 meters at a distance of 0.2 km to 5 km away from the system. The amount of focusing group movement at -20 ℃ and 45 ℃ is given. The simulation results show that the illumination nonuniformity is less than 15%. By analyzing the optical aberration effects on the illumination uniformity and designed dimming group, the theoretical relationship between the dimming group movement and the illumination distance is gotten. The design result shows that the illumination in different distances will be uniform by adjusting the dimming group position automatically. The design and analysis results show that laser active illumination system can accomplish uniform illumination for the view field of tracking and measurement by moving the dimming group, which is beneficial for the dim target detection and measurement.
laser active illumination;automation;uniform illumination
2016-01-18;
2016-02-13
国家高技术研究发展计划(863计划)资助项目(No.2014AA7031082A)
2095-1531(2016)03-0342-07
TN202
A
10.3788/CO.20160903.0342

刘韬(1989—),男,吉林长春人,硕士,研究实习员,2012年于北京理工大学获得硕士学位,主要从事光学系统设计方面的研究。E-mail:liutaosd123@126.com
Supported by National High-tech R&D Program of China(No.2014AA7031082A)
猜你喜欢
中国交通信息化(2020年5期)2021-01-14 01:49:02
光源与照明(2019年4期)2019-05-20 09:18:24
测控技术(2018年5期)2018-12-09 09:04:36
中国交通信息化(2018年9期)2018-11-09 01:09:20
电子测试(2018年9期)2018-06-26 06:45:40
电子制作(2017年17期)2017-12-18 06:40:52
光学精密工程(2016年4期)2016-11-07 09:05:39
系统工程与电子技术(2016年7期)2016-08-21 13:58:56
空间控制技术与应用(2015年1期)2015-06-05 12:22:16
现代电子技术(2009年9期)2009-06-25 04:45:56