基于虚拟基线的干涉仪测向系统基线配置设计*
2016-11-07 07:01:26韦敏峰田德民
舰船电子工程 2016年10期
李 超 韦敏峰 李 迪 田德民
(中国船舶重工集团公司第七二三研究所 扬州 225001)
基于虚拟基线的干涉仪测向系统基线配置设计*
李超韦敏峰李迪田德民
(中国船舶重工集团公司第七二三研究所扬州225001)
通过外场应用条件下基于虚拟基线的多基线数字干涉仪设计、仿真,阐述了实际工程应用中,在工作频率范围、测向精度和相位差测量精度等约束条件下,如何设置天线阵列基线的问题,给出了不同基线配置间逐级解模糊的条件及基于虚拟基线配置方法的组阵设计依据,并验证了该方法的有效性。
虚拟基线; 基线比; 解模糊; 相位差测量精度
Class NumberTN971
1 引言
干涉仪测向是电子对抗领域的基本问题[1],干涉仪测向系统存在最大无模糊视角范围与测向精度对天线间距要求的矛盾,通常采用短基线来解相位模糊,长基线来保证测量精度[2~3]。但在实际工程应用过程中经常会遇到由于受高端波长限制短基线物理无法实现的情况,另外在干涉仪测向系统基线配置设计时往往会忽略相位差测量精度这一因素[4~5]。本文综合考虑工作频段、测向精度、天线尺寸和相位差测量精度等因素,提出了基于虚拟基线的基线配置方法,解决了以上工程实现中出现的问题。
2 干涉仪测向的数学描述
1) 模糊问题的出现
干涉仪测向是通过测量位于不同波前的天线接收信号的相位差,经过处理获取来波方向,假定满足远场条件,具体参数定义如下:A、B是两个全向接收天线(可接收±90°范围内的信号),其基线长度为d,信号入射角为θ,信号波长为λ,信号到达天线阵元A,B时,波前的相位差为φ(绝对相位差),则:
(1)
在不考虑相位差测量误差的情况下,令φ=π,最大不模糊角为θmax,基线长度d在设计时,应满足:
(2)
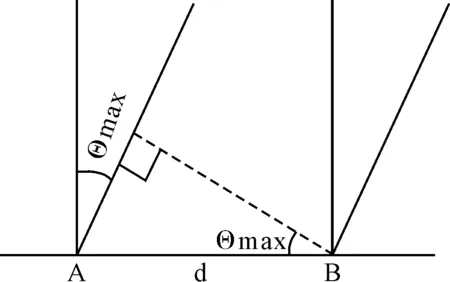
图1 干涉仪测向模糊问题
2) 解模糊条件的数学描述
干涉仪解模糊的原理[8~10]为:若不考虑通道相位差误差,任何短基线在无模糊的情况下都可以直接解更长基线的模糊,解模糊的公式如下:
(3)
在考虑通道相位差误差的情况下,短基线只能解满足一定条件的更长基线,必须逐级进行解模糊,最终解掉最长基线的模糊。解模糊的过程如下:
(4)
由式(4)可知,
(5)
要保证解模糊的结果正确,需满足以下关系:

(6)
此时解模糊分以下几种情况:
(1)实基线解实基线需满足的条件
表1 实基线解实基线模糊各情况Δφ讨论
由表1可知,实基线解实基线需满足的条件为
(7)

(2)实基线解虚基线
表2 实基线解虚基线模糊各情况Δφ讨论
由表2可知,实基线解虚基线需满足的条件为
(8)

(3)虚基线解实基线模糊
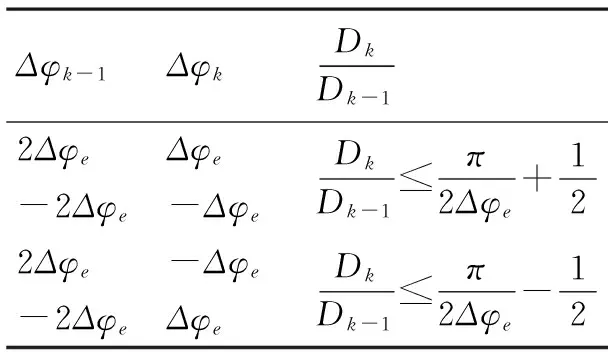
表3 虚基线解实基线模糊各情况Δφ讨论
由表3可知,虚基线解实基线需满足的条件为
(9)
(4)虚基线解虚基线
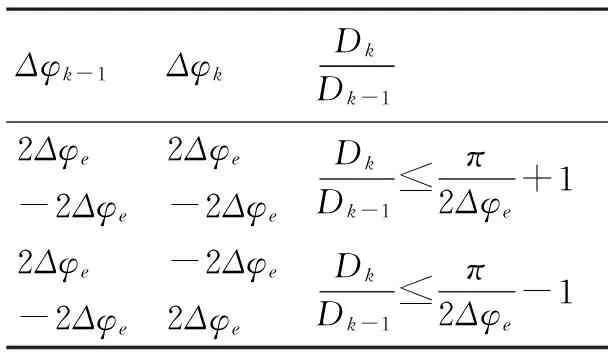
表4 虚基线解虚基线模糊各情况Δφ讨论
由表4可知,虚基线解虚基线需满足的条件为
(10)

3 基于虚拟基线的基线配置方法
天线阵列基线配置的问题可描述为:在规定工作波段内和规定侦察覆盖范围内设计尽可能长的基线保证测向精度,同时考虑到天线尺寸和相位差测量精度的约束条件下,如何确定天线的个数M和适当的基线比,当然,在满足测向性能指标要求的前提下,需要的天线阵元数越少,且能够在较大相位差测量误差的环境下正确解模糊越好。
基于虚拟基线的基线配置步骤如下:
1) 确定最长基线长度
测向误差的表达式为
(11)
由式(11)可得,
(12)
其中,λmax为规定工作波段内的最大波长,Δφk为通道相位差测量误差,Δφk∈[-Δφe,Δφe],Δφe>0,θmax为规定侦察覆盖最大范围,Δθ为要满足的测向误差。
2) 确定最短基线长度
在不考虑通道相位差误差的情况下,式(2)给出了最短基线长度的配置准则,在工程应用中往往天线(如平面螺旋天线)的物理尺寸远远大于最短基线长度的要求,此时可以通过虚拟基线加以解决。其次,各基线在进行相位测量时不可避免地存在测量误差,为进一步保证最短基线长度无模糊性,应把相位差测量误差做为参数变量引入设计当中。
(13)
3) 配置天线阵列基线比
(1)令d=M*d1。根据天线物理尺寸和最短基线长度配置最短基线d1。由于天线物理尺寸往往远大于最短基线长度,因此,可通过虚拟基线构造。考虑天线阵元的最小间距p*d1,令dm-dn=(m+1)d1-m·d1=d1,在最长基线范围内,列出所有的m+1和m的组合。
(2)根据上文提到的方法,计算出K1、K2、K3和K4。
(3)进行天线阵元数搜索。初始阵元为3个,基线长度分别为(m+1)d1,m·d1。通过K3判断d1是否能解m·d1,若可解,易得m·d1可解(m+1)d1,最长基线无模糊;若不可解转步骤(4)。
(4)阵元数加1。列出所有的(m+1)d1、m·d1和(M-2m-1)d1的组合。利用K1、K2、K3和K4计算出符合条件的最长的实基线或虚拟基线,保证基线解模糊速度最快。进行迭代处理。用计算得出的实基线或虚拟基线解更长的实基线或虚拟基线的模糊。若最长基线可解,输出基线配置比,遍历下一种组合。
(5)若所有组合均不可解,阵元数继续加1,原理类比步骤(4),直到满足最长基线可解。
4 外场应用设计实例
为了验证以上配置算法的工程有效性,本文进行了如下设计实验,工作频率范围2GHz~6GHz,侦察范围±π/4,相位差测量误差为±π/9,测向系统精度要求由于1.5°,平面螺旋天线物理尺寸r=25mm。
1) 确定最长基线长度
由式(12)得
2) 确定最短基线长度
由式(13)得
为便于工程应用,取d=475mm,d1=19mm。
3) 配置天线阵列基线比
(1)计算得M=d/d1=25。两天线阵元间最小间距为2×25=50mm,p≥50/19=2.63,取p=3。
(2)由式(7)~式(10)计算得,


(3)从初始3个天线阵元开始,基线长度分别为(m+1)d1,m·d1。
则由m+1+m=M,
因为K3≤4<12,
所以无法从最短虚拟基线d1直接解实基线的模糊,因此3个天线阵元无法构造出满足要求的基线配置。
(4)阵元数加1。
此时为4个天线阵元,此时将最长基线Md1配置成三段,分别为(m+1)d1,m·d1和(M-2m-1)d1,为便于工程应用,此处m取整数。由于阵元间距的限制,m≥p=3,从m=3开始遍历基线组合。基线组合及解模糊步骤如表5所示。
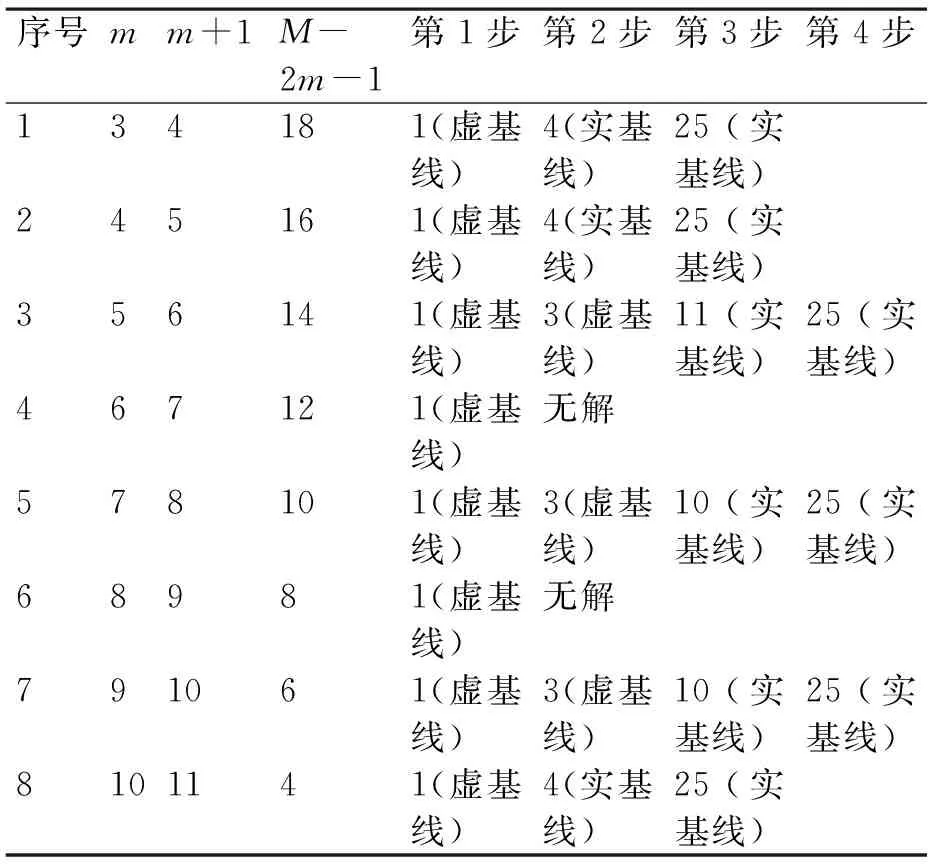
表5 基线组合及解模糊步骤
如表5所示,共8种组合方式,其中1、2、3、5、7、8号组合方式均能够准确解最长基线Md1的模糊。根据需求选取其中一种组合方式,如8号组合方式,此时三段基线长度分别为76mm,190mm,209mm。
当信号入射角为45°时,干涉仪测向精度与频率关系曲线如图2所示。
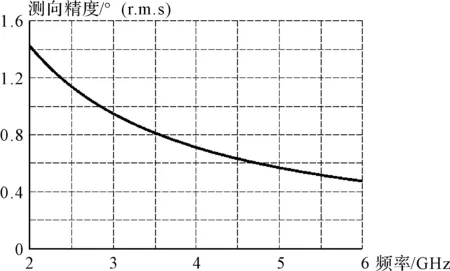
图2 干涉仪测向精度与频率关系曲线
当频率为2GHz时,干涉仪测向精度与入射角关系曲线如图3所示。
从图2和图3可以看出,按照以上算法设计出的天线阵列,在规定相位差误差范围内,频段内、方位内都不会出现测向模糊,且达到了规定的测向精度。
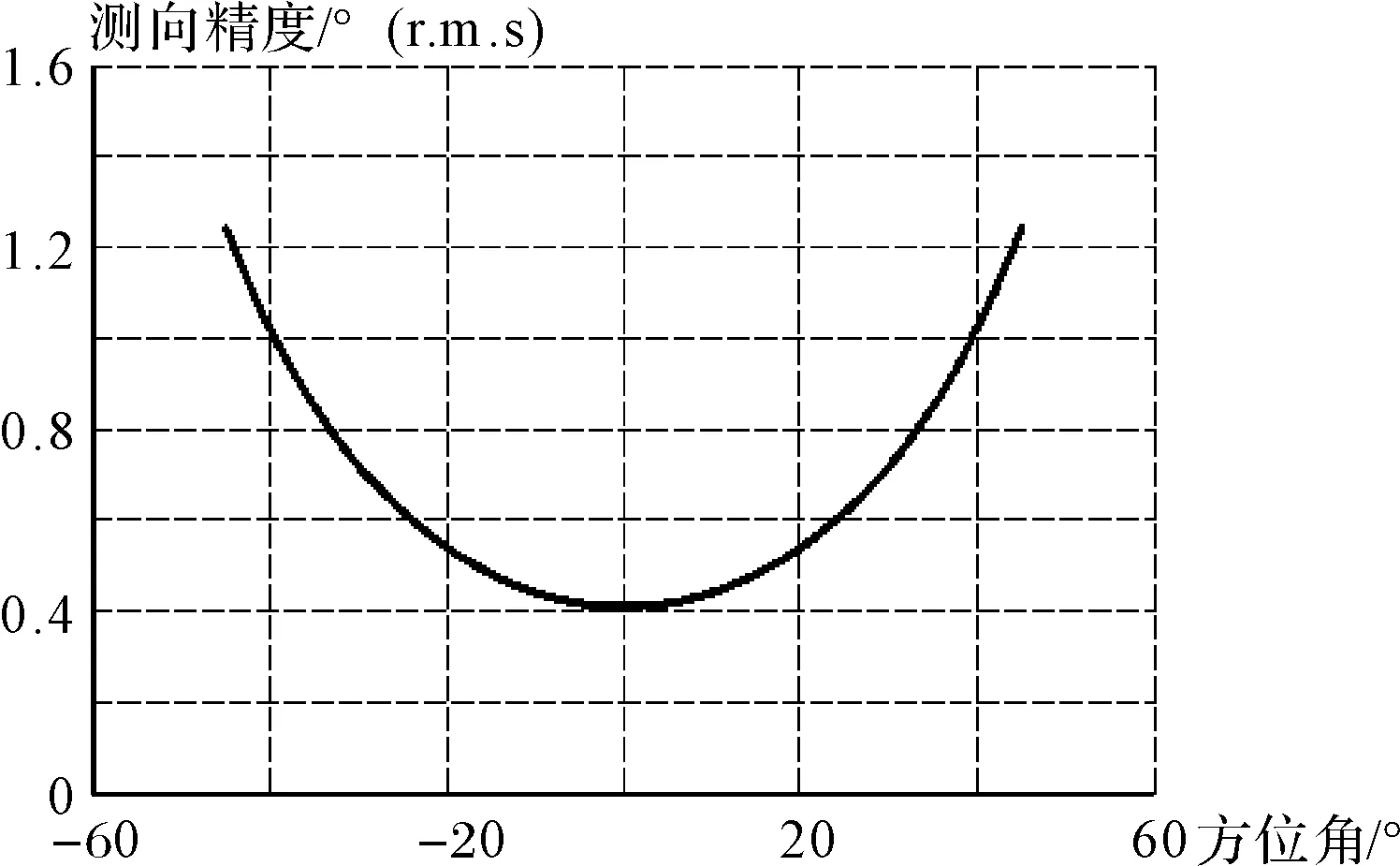
图3 干涉仪测向精度与入射角关系曲线
5 结语
本文基于虚拟基线的基线配置方法给出了在工作频率范围、测向精度和相位差测量精度等约束条件下不同基线配置间逐级解模糊的条件及基于虚拟基线配置方法的组阵设计依据,保证了测向系统在频段内、方位内都不会出现测向模糊,并能保证测向精度。同时,将相位差误差做为参数引入设计当中,具有一定的工程实用性。下一步工作将进一步改进基线比迭代算法,使之迭代速度更优。
[1] 杨伟程.单站长基线干涉仪测向定位技术研究[D].西安:西安电子科技大学,2009.
[2] 李建军.多基线干涉仪测向的基线设计[J].电子对抗,2005(3):8-11.
[3] 崔旭.基于虚拟基线的干涉仪测向改进方法[J].通信技术,2011,44(7):89-91.
[4] 司伟健,初萍.干涉仪测向解模糊方法[J].应用科技,2007,34(9):54-57.
[5] 王玉林,陈建峰.干涉仪测向基线组合方式选取依据初探[J].无线电工程,2012,42(6):52-54.
[6] 吴一帆.干涉仪基线组合对测向精度的影响[J].中国新通信,2014,16(2):60-61.
[7] 吴宝东,陈舒.基于相位干涉仪测向系统的相位误差分析[J].舰船电子对抗,2008,31(3):74-76.
[8] 张文旭,司锡才,蒋伊琳.相位干涉仪测向系统相位误差研究[J].系统工程与电子技术,2006,28(11):1631-1632.
[9] 李兴华,顾尔顺.干涉仪解模糊技术研究[J].现代防御技术,2008,36(3):92-96.
[10] 蒋学金,高遐,沈扬.一种多基线相位干涉仪设计方法[J].电子信息对抗技术,2008,23(4):39-45.
Baseline Configuration Design of Interferometer Direction Finding System Based on Virtual Baseline
LI ChaoWEI MinfengLI DiTIAN Demin
(723 Research Institute, CSIC, Yangzhou225001)
Taking frequency, accuracy of direction finding and accuracy of phase difference into consideration, this paper introduces the method of defuzzification step by step and proposes the baseline configuration design of interferometer direction finding system based on virtual baseline. At last, it carries out the simulation experiment and proves that the baseline configuration design can solve the problem of antenna array arrangement in multi-baseline digital interferometer effectively.
virtual baseline, ratio of baseline, defuzzification, accuracy of phase difference
2016年4月7日,
2016年5月27日
李超,男,工程师,研究方向:电子对抗。
TN971
10.3969/j.issn.1672-9730.2016.10.019
猜你喜欢
九江学院学报(自然科学版)(2022年2期)2022-07-02 02:34:06
中学生数理化·八年级物理人教版(2021年12期)2021-12-31 03:23:02
科技研究·理论版(2021年20期)2021-04-20 01:13:14
应用数学(2020年2期)2020-06-24 06:02:40
计测技术(2020年6期)2020-06-09 03:27:14
航天电子对抗(2019年4期)2019-06-02 08:22:40
制导与引信(2017年3期)2017-11-02 05:16:58
火控雷达技术(2016年2期)2016-02-06 02:29:06
火控雷达技术(2016年2期)2016-02-06 02:29:04
电测与仪表(2015年18期)2015-04-12 00:45:28