基于图像增强与边缘检测的弱特征目标轮廓检测算法*
2016-11-07 05:41吴鹃
计算机与数字工程 2016年10期
吴 鹃
(西安职业技术学院 西安 710077)
基于图像增强与边缘检测的弱特征目标轮廓检测算法*
吴鹃
(西安职业技术学院西安710077)
为了解决当前目标轮廓检测算法在边缘特征微弱、背景复杂环境下的轮廓提取精度较低的不足,设计了基于图像增强与边缘检测的目标轮廓检测算法。首先,基于拉普拉斯离散公式与二维傅里叶变换公式,构造了联合图像增强算子;然后,基于二阶导数梯度特征,设计了目标边缘检测算子,实现对目标周长、面积等参数的测量。实验数据显示:与当前目标轮廓提取算法相比,面对不利于测量工作的恶劣环境时,所提算法具有更高的提取精度与稳定性。
目标轮廓检测; 图像增强; 边缘检测; 拉普拉斯; 傅里叶变换; 梯度特征
Class NumberTP391
1 引言
随着企业竞争日益激烈,将科技应用于生产制造,从而降低生产成本、提高产品质量、加快生产效率,这已经是每个企业争夺的制高点。尤其是随着“工业4.0”、“中国制造2025”等概念和远景的深化落实,将制造工业推向智能化、科技化、无人化[1~2]。目标制造属钢铁产业核心分支之一,而钢铁产业关乎国计民生,可见目标制造智能化的必要性,其中的目标轮廓检测是关键工序,决定了目标质量、成本[3~4]。虽然已经有相关技术设备取代人力,对目标参数进行测量,但是,当目标特征微弱、背景复杂时,测量精度大大降低,影响设备对产品质量与成本的控制。
对此,国内研究人员已经将图像处理与计算机视觉技术引入到目标轮廓检测中,并取得了一定成果,如秦国华[5]提出了目标磨损自动检测系统,根据Otsu法和B-样条曲线拟合法,建立了自动确定上限阈值与下限阈值的算法,准确地增强了磨损区与背景区、未磨损区之间的灰度对比度,通过分析目标磨损图像的稳定区和磨损边缘的非稳定区,提出了边界提取的局部方差阈值算法,给出了自适应的局部方差阈值,清晰地将目标磨损区从图像中分割出来,并利用形态学描述方法对分割部分进行孔洞填充与边界完整化,从而直接计算出磨损区域的几何参数尺寸,最后达到轮廓检测的目的。然而,该技术是依靠目标与背景显著的灰度差,在目标背景复杂且边缘不明的情况下,往往不能区分目标与背景,导致轮廓检测失误。如吴飞祥[6]利用多线程同步机制实现图像采集和图像处理的并行执行,设计了具有细节保护特性的混合滤波器,在有效去除混合噪声的同时也很好地保护了图像的细节,然后采用了迭代阈值算法对图像进行了有效的分割,获得二值图像,最后使用图像形态学的腐蚀算法实现了工件轮廓的提取。但是,此技术依靠轮廓特征点的清晰程度,在特征点微弱时,往往影响了轮廓提取,导致轮廓检测失误。
对此,本文以弱特征工件为目标,先基于拉普拉斯与傅里叶的增强算子,完成目标图像增强。然后通过梯度特征,建立边缘检测算子,完成对目标周长、面积参数的测量。最后,测试了本文目标轮廓提取算法的精度与稳定性。
2 本文目标轮廓检测算法
本目标轮廓检测算法见图1。首先,通过工业相机对目标进行图像采集。然后用拉普拉斯图像微分与傅里叶变换相结合的方式,对图像进行增强去噪处理。最后计算图像梯度,对梯度差较大的地方,进行边缘检测,从而确定目标轮廓边缘,计算出面积与周长。

图1 本文机制架构
如图2所示,可见目标边缘特征微弱,背景复杂不明,如果采用传统技术,不对图像进行有效的增强处理,轮廓检测有一定的困难。

图2 边缘特征微弱的目标图
3 基于拉普拉斯与傅里叶的联合增强
由于目标原始图像边缘特征微弱,普通的基于轮廓边缘的检测算法很难精确锁定目标边缘,故本文设计了基于拉普拉斯图像微分与傅里叶变换的图像增强算子。由于拉普拉斯是一种微分算子,它的应用强调图像中灰度的突变的区域,将产生一副把图像中浅灰色边线和突变点叠加到暗背景中的图像,即拉普拉斯图像与原始图像的叠加,即达到了锐化边缘的效果,又能复原背景信息[7]。首先,图像函数的拉普拉斯变换定义为
(1)
其中L(x,y)为拉普拉斯图像,f为图像函数,其中的图像在x,y上的二阶偏微分定义如下:
(2)
(3)
将式(2)、(3)代入式(1)得:
L(x,y)=f(x+1,y)+f(x-1,y)+f(x,y+1)
+f(x,y-1)-4f(x,y)
(4)
本文采用空域增强与频域增强相耦合的方式,即在拉普拉斯图像微分上,再加入傅里叶变换,保证增强的前提下,没有噪声的增加[8~9]:
(5)
式中f为图像函数,F为傅里叶变换后图像函数,M、N为图像长宽,傅里叶反变换如下所示:
(6)
采用本文的耦合傅里叶变换与拉普拉斯增强算子对图2进行处理,得图3,可见目标特征增强后边缘清晰,为边缘检测做好了数据准备。

图3 增强效果图
增强算法部分关键代码:
LPBYTE lpSrc;
long i,j;
int gray[256];
BYTE pixel;
LPBYTE lpDIBBits=m_pDib->GetData();
LONG lWidth=m_pDib->GetWidth();
LONG lHeight=m_pDib->GetHeight();
memset(gray,0,sizeof(gray));
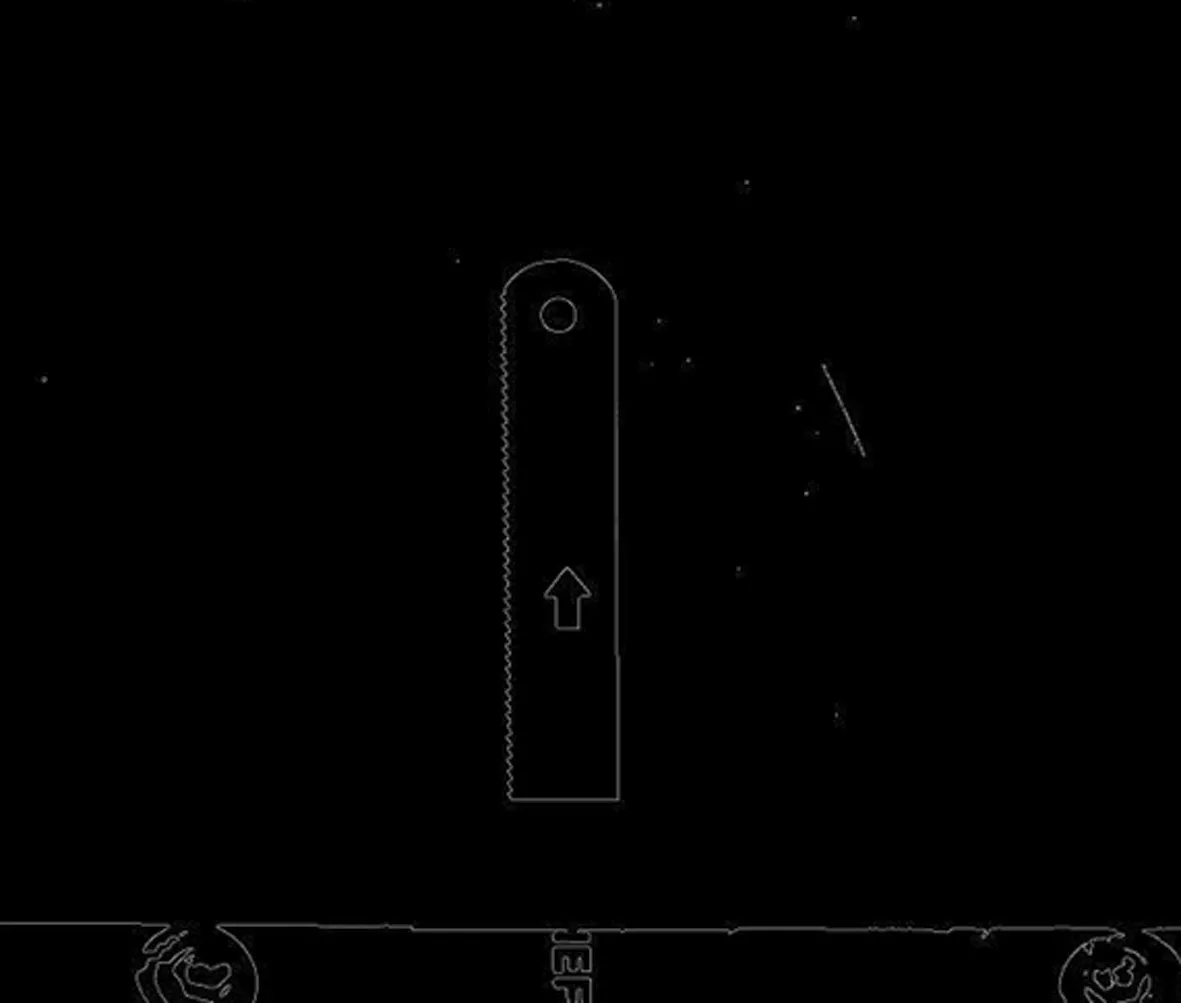
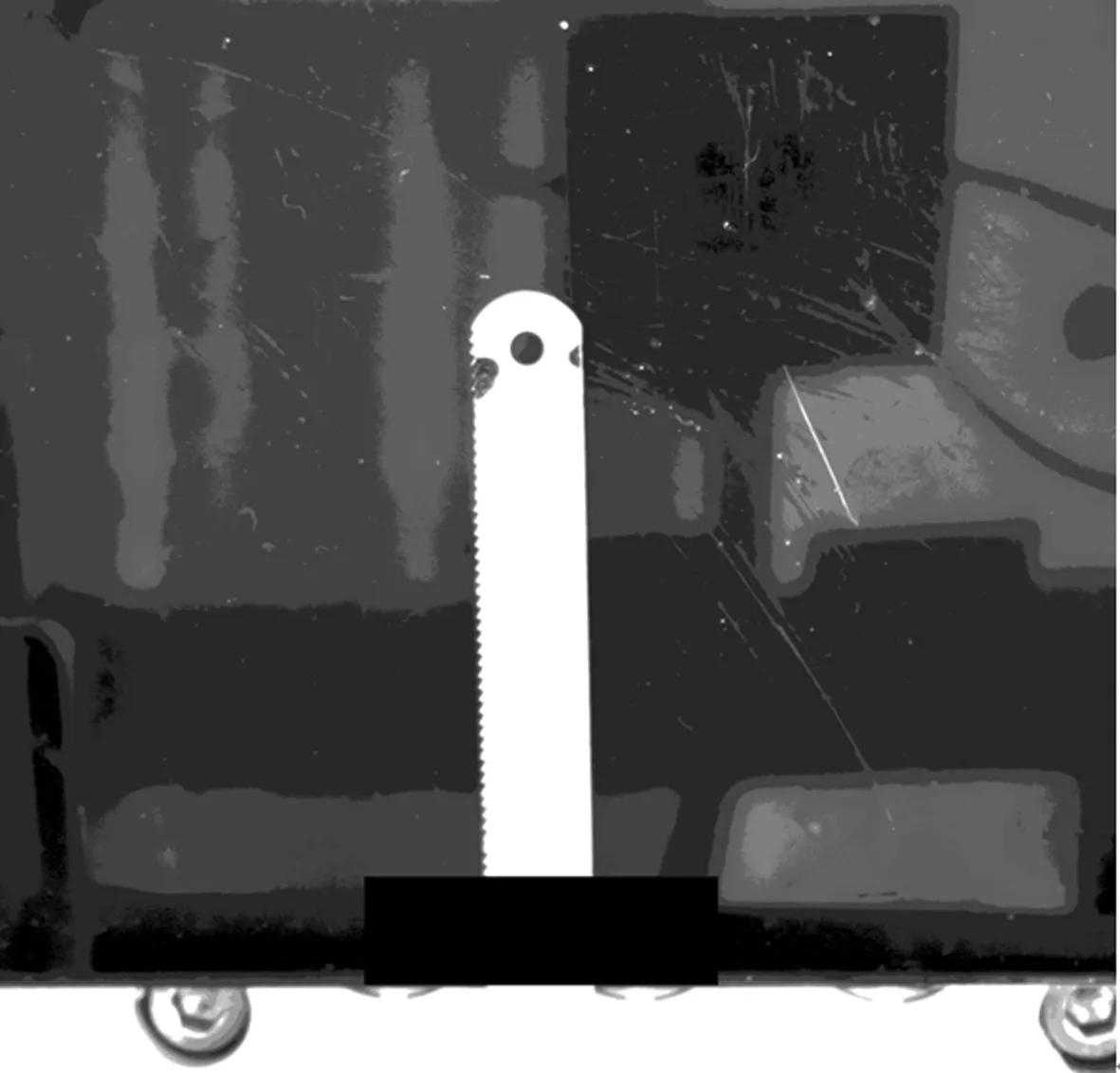
for(j = 0; j for(i = 0;i lpSrc = (LPBYTE)lpDIBBits + lWidth * j + i; pixel = (BYTE)*lpSrc; gray[pixel]++;}} for(i=0;i<256;i++){ probability[i] = gray[i] / (lHeight * lWidth *1.0f);} LPBYTE lpDIBBits=m_pDib->GetData(); LONG lWidth=m_pDib->GetWidth(); LONG lHeight=m_pDib->GetHeight(); hNewDIBBits = LocalAlloc(LHND,lWidth * lHeight); if (hNewDIBBits == NULL){return FALSE;} lpNewDIBBits = (LPBYTE )LocalLock(hNewDIBBits); lpDst = (LPBYTE)lpNewDIBBits; memset(lpDst,(BYTE)0,lWidth * lHeight); memset(temp,0,sizeof(temp)); Histogram_Statistic(fPro); 完成道具图像增强后,需提取目标轮廓,本文采用基于梯度特征边缘检测算子,对图像中梯度差明显的地方进行探测,经过上节图像增强的目标边缘与背景梯度差较大。梯度的方向与大小计算公式如下所示: (7) (8) 式中,d为梯度向量,v为梯度大小。 可见,图像梯度[10~11]是依赖于每个像素X,Y方向的偏导数。另外还有一个重要参数是梯度方向: (9) a为梯度向量,得到梯度大小、方向夹角局部最大值时,即为边缘处,在对应位置置255,否则视为背景,灰度置为0,以此边缘检测算子处理图3,得图4,得到边缘轮廓图,可见,准确得到了目标轮廓。 为了进一步确认,将该轮廓检测结果标注在原图上,如图5所示,证明本文边缘检测算子精确地检测到目标边缘。最后以此边缘轮廓,计算目标面积与周长,完成轮廓检测。周长如下所示: (10) 式中z为周长,L为目标边缘函数,累积计算边缘上像素点总数,即为周长z。 (11) 式中s为面积,A为目标边缘内函数,累积计算边缘内像素点总数,即为面积s。 图4 边缘轮廓图 图5 边缘检测图 边缘检测部分关键代码: LPBYTElpSrc; LPBYTElpDst; LPBYTElpNewDIBBits; HLOCALhNewDIBBits; long i,j; BYTE pixel; float fPro[256]; float temp[256]; int nMap[256]; LPBYTE lpDIBBits=m_pDib->GetData(); LONG lWidth=m_pDib->GetWidth(); LONG lHeight=m_pDib->GetHeight(); hNewDIBBits = LocalAlloc(LHND,lWidth * lHeight); if (hNewDIBBits == NULL){return FALSE;} lpNewDIBBits = (LPBYTE )LocalLock(hNewDIBBits); lpDst = (LPBYTE)lpNewDIBBits; memset(lpDst,(BYTE)0,lWidth * lHeight); Histogram_Statistic(fPro); for (i = 0; i < 256; i++){ if (i == 0){temp[0] = fPro[0];} else{ temp[i] = temp[i-1] + fPro[i];} fPro[i] = temp[i];} for (i = 0; i < bGray; i++){ if (i == 0){ temp[0] = fpPro[0];}else{ temp[i] = temp[i-1] + fpPro[i];} fpPro[i] = temp[i];} for (i = 0; i < 256; i++){ int m = 0; float min_value = 1.0f; 待处理图像如图6所示,包含带有目标的图像。为了体现本文算法的优势,将当前目标轮廓检测性能较好的技术-文献[5]设为对照组。本文设计了基于拉普拉斯与傅里叶的增强算子,增强效果如图7所示,可见目标边缘特征增强,与背景形成较大的梯度差;在此基础上,提取梯度特征,对增强后的图像进行边缘检测,提取目标轮廓,如图8所示,可见边缘准确提取,再在原图上进行标注,如图9所示。 文献[5]的方法对图6进行高通均值滤波处理,依赖局部像素极大值的差异性,在目标边缘特征微弱,图像背景复杂不明的情况下,往往增强效果不佳,如图10所示。对照组边缘探测技术依赖边缘清晰程度,在图10增强不佳的基础上,往往出现检测失误、不充分的情况,如图12所示,可见面积、周长特征在此基础上的测量都是错误的。 图6 待检测目标原 图7 本文算法的增强效果 图8 轮廓线图像 图9 边缘检测图像 图10 文献[5]的增强效果 图11 文献[5]的轮廓线提取结果 图12 文献[5]的定位图像 为了解决目标边缘特征微弱,背景复杂不明环境下测量失误或不充分的问题,本文设计了基于图像增强与边缘检测的目标轮廓检测算法,实现对目标图像的边缘增强、轮廓提取、边缘检测、轮廓检测。实验结果表明:与当前目标轮廓检测技术相比,在面对现场环境恶劣下导致的测量误差时,本文方法具有更好的精度和鲁棒性,为目标高质制造提供了技术保障。 [1] 付增良,秦永明,张江.基于变分水平集的目标轮廓分割方法[J].计算机工程与设计,2013,34(7):2512-2516. FU Zengliang,QIN Yongming,Zhang Jiang. Object contour segmentation method based on variational level set[J]. Computer Computer and Design,2013,34(7):2512-2516. [2] Kuiying Yin,Lin Jin,Changchun Zhang. A method for automatic target recognition using shadow contour of SAR image[J]. IETE Technical Review,2013,30(4):313-323. [3] Tony Boutros,Ming Liang. Detection and diagnosis of bearing and cutting tool faults using hidden Markov models[J]. Mechanical Systems and Signal Processing,2011,25 (6):2102-2124. [4] Chen Zhang,Jilin Zhang. On-line tool wear measurement for ball-end milling cutter based on machine vision[J]. Computers in Industry,2013,33(10):1186-1192. [5] 秦国华.目标磨损的自动检测及检测系统[J].光学精密工程,2014,11(17):246 -249. QING Guohua. Automatic detection and detection system for target wear[J]. 2014,11(17):246 -249. [6] 吴飞祥,卢道华,王佳.卷板加工特征快速提取的应用研究[J].机械设计与制造,2008,12(5):138-140 WU Feixiang,LU Daohua,WANG Jia. Application of fast feature extraction in roll processing[J]. Machinery Design & Manufacture,2008,12(5):138-140. [7] Ja-Rin Park,Hyeong-Bin Cheong. Spectral analysis method for a limited area using the eigenmodes of the spherical Laplacian operator[J]. Asia-Pacific Journal of Atmospheric Sciences,2013,49(5):665-674. [8] M.I. Epov,E.P. Shurina,E.P. Shtabel. Three-dimensional modeling of pulsed soundings using a fast Fourier transform[J]. Russian Geology and Geophysics,2016,57(2):329-336. [9] Xiaoxu Lu,Liyun Zhong,Hongzhan Liu. Causes of the reconstructed cross appearing in lensless Fourier transform digital holography[J]. Optik - International Journal for Light and Electron Optics,2010,121(19):1777-1780. [10] Joon Hong Park,Hyun Wook Park. Fast view interpolation of stereo images using image gradient and disparity triangulation[J]. Signal Processing: Image Communication,2003,18(5):401-416. [11] 杨建国.基于机器视觉的目标磨损检测技术[J].东华大学学报(自然科学版),2014,23(2):271-276. YANG Jianguo. Object wear detection technology based on machine vision[J]. Journal of Donghua University (NATURAL SCIENCE EDITION),2014,23(2):271-276. Target Contour Measurement Algorithm Based on Image Enhancement and Edge Detection WU Juan (Xi’an Vocational and Technical College, Xi’an710077) In order to solve the deficiency of low contour extraction accuracy in weak edge character, complex background environment, this paper designes algorithm for measuring the parameters of tool based on image enhancement and edge detection. First, based on the Laplace discrete formula and two-dimensional Fourier transform formula,the coupling of the two image enhancement operator is constructed. Then, is based on the characteristics of the second derivative gradient, tool edge detection operator is designed for the cutting tool parameters such as perimeter,area measurement. Experimental data shows that compared with the current tool parameters measurement technology,in the face of unfavorable to measurement of bad environment,this algorithm has higher measurement accuracy and stability. target contour detection, image enhancement, edge detection, Laplasse, Fourier transform, gradient feature 2016年4月4日, 2016年5月27日 吴鹃,女,硕士,讲师,研究方向:图像处理、计算机应用。 TP391 10.3969/j.issn.1672-9722.2016.10.0414 基于梯度特征的边缘检测


5 实验与讨论





6 结语
猜你喜欢
燃气涡轮试验与研究(2021年6期)2021-08-01海洋信息技术与应用(2020年4期)2021-01-18装备制造技术(2020年1期)2020-12-25制造技术与机床(2019年11期)2019-12-04中国生物医学工程学报(2019年5期)2019-07-16北京航空航天大学学报(2017年3期)2017-11-23中国交通信息化(2017年4期)2017-06-06现代计算机(2016年11期)2016-02-28中央民族大学学报(自然科学版)(2014年2期)2014-06-09郑州大学学报(理学版)(2014年3期)2014-03-01