三型海洋重力仪转向数据特征分析
2016-11-04 12:47王劲松,张向宇,廖开训等
中国科技信息 2016年15期
三型海洋重力仪转向数据特征分析

通过对三型四套海洋重力仪同船实测转向数据的分析,认为GT-2M型海洋重力仪通过巧妙的平台设计可以实现物理跟踪当地方位的功能,从而极大地减小了厄特渥斯改正中因航向引起的误差。其小幅转向数据无需特殊处理即可使用,大幅转向数据在经过处理后能最大程度地得以保留,尤其是其工作原理使得该型海洋重力仪在换线后能以极快的速度稳定下来进入测量状态。综合来看,GT-2M海洋重力仪的转向性能较为优越。
在海洋重力测量中,厄特渥斯(Eötvös)改正误差一直是影响测量精度的主要误差源(张涛等,2005)。由厄特渥斯改正公式可知,厄特渥斯效应的大小主要与测量航迹线的航向和航速有关;因此,在测量平台的定位精度不变的情况下,通过各种校正计算方法可在一定程度上提高厄特渥斯效应改正精度,事实上国内许多研究人员也都是专注于这一方面(张立华等,2002;张涛等,2005;于波等,2007)。那么,除了数据处理还有没有其它途径可以进一步改善厄特渥斯效应的改正效果呢?
从海洋重力仪的设计原理来看,当今世界普遍使用的船载海洋重力仪主要分为三大类:第一类是全球应用最广泛的美国产L&R型海洋重力仪及其衍生系列,第二类是德国产的KSS31(M)型海洋重力仪,第三类是近十年来异军突起的俄罗斯产GT系列海洋重力仪。L&R型海洋重力仪及其衍生系列,比如ZLS型海洋重力仪以及DGS型海洋重力仪,其工作原理基本一致,均使用零长弹簧,属于摆杆型;KSS31(M)型海洋重力仪采用直立弹簧,属于轴对称型,它不受水平加速度的影响,从根本上消除了CC效应误差,可在较恶劣的海况下工作(宁津生等,2014);GT系列海洋重力仪也属于直立型,与前两类海洋重力仪相比,虽然都采用的是物理平台,但其独特的设计使得重力仪不仅能物理跟踪当地水平,还能物理跟踪当地方位(常国斌等,2014),属于三轴惯导平台。这种三轴惯导平台固定指北,因而在设计上就已经极大地减小了厄特渥斯效应中因航向引起的误差,比前两类具有更高的测量精度和分辨率。
目前国内海洋重力测量和研究机构拥有的重力仪基本是前两类海洋重力仪,而广州海洋地质调查局不仅拥有属于第一类的LaCoste S-II型及ZLS型海洋重力仪以及属于第二类的KSS31和KSS31M型海洋重力仪,更于2013年引进了两套GT-2M型海洋重力仪。利用这两套GT-2M型海洋重力仪验收的机会,广州海洋地质调查局于2015年3月在“探宝号”船上精心组织了一次三型四套海洋重力仪的同船对比试验,航次编号:TB201502,以更好地了解各型海洋重力仪的性能及特点。虽然国内外已有不同类型海洋重力仪的对比试验(Peter Kovrizhnykh等,2011;张振波等,2015),但像这样规模的比测试验尚属首次。本文将通过对GT-2M海洋重力仪的技术特点介绍、各型海洋重力仪转向数据的对比分析,重点讨论各型海洋重力仪在转向过程中的技术特点及其数据特征。
设备介绍
同船测试的四套海洋重力仪分别为:于2002年引进的KSS31M海洋重力仪(SN:035)1套,于2011年引进的ZLS海洋重力仪(SN:D011)1套及新引进的GT-2M海洋重力仪(SN:032和033)2套。其中,KSS31M海洋重力仪是直立弹簧型,ZLS海洋重力仪属于摆杆型。前人已有许多文献介绍过直立弹簧型和摆杆型的工作原理(LACOSTE,1967;曾华霖,2005;陈邦彦等,1998),本文将主要介绍的是GT-2M海洋重力仪的工作原理。
GT-2M海洋重力仪主要组成部分为重力传感器和陀螺稳定平台、旋转平台、减震座、电源及CDU(控制及显示单元),可直接接入船载GPS,系统整体效果图如图1所示。
GT-2M海洋重力仪采用直线型工作原理(如图2所示):即用两个金属弹簧左右拉住,保证用特殊材料制作的金属棒直立,测量质块沿金属棒在一定范围内上下滑动。在线圈中预先设定一个稳定电流用来补偿质块本身的重量,电流公式如下:I=mg0 ,其中:I:稳定电流, m:质块质量,g0:重力常数。重力大小改变引起测量质块发生位移,一个LED光学传感器测得这个位移量后将其转为电流,然后通过测量/补偿线圈提供一个补偿电流,使得质块回到原始状态(平衡位置),根据补偿电流的大小可以计算出相对重力值。
GT-2M海洋重力仪是在GT-1A航空重力仪基础上研发出来的,与其他类型的重力仪相比,其平台技术相对要优越些,纵倾横摇角度均高达±45°,且动态测量范围高达±1g,可在恶劣海况下正常采集数据。

图1 GT-2M海洋重力仪
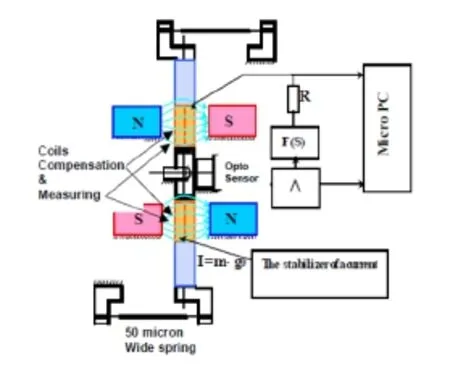
图2 GT-2M海洋重力仪传感器工作原理示意图
数据采集
在TB201502航次中,除KSS31M海洋重力仪原本就固定安装在仪器房偏左的位置外,两套GT-2M海洋重力仪与ZLS海洋重力仪以纵向排列的方式全部安装在仪器房的船舶中心线附近。本航次共采集了16条测线,包括4条以往的重复测量测线以及L3线三个往返6条重复测线,实际测线分布见图3。
在TB201502航次中出港前和进港后,按海洋地质调查规范进行了重力基点的比对工作,探宝号船上的四套重力仪工作正常。除L3线其中一个往返重复测线分别采用8节、10节的航速外,其余测线均以6节的航速做匀速直线测量以尽量减小对比误差。因工区靠近珠江口,实际作业时难以避免渔业活动的影响,线上避渔船渔标等情况时有发生。但正因为如此,我们的采集数据除了有换线转向的数据,还有线上的转向数据可供分析。避让障碍物时,转向幅度有大有小,本文将分别予以分析从而希望获得三型重力仪比较全面的转向性能对比。

图3 实际测线分布图
数据分析
因GT-2M海洋重力仪输出的原始读数为经过厄特渥斯改正和正常场(Helmert公式)改正后的结果,而KSS31M和ZLS海洋重力仪提供的原始读数是未经任何改正的数据,因此,为了便于对比分析,在对各型重力仪实测数据进行处理时专门针对GT-2M海洋重力仪采取了相应的处理措施。具体处理方法如下:
首先由原始数据中提取相关项,对不同仪器采用不同延迟时间进行滞后校正(两套GT-2M海洋重力仪采用150s滤波档,KSS31M海洋重力仪及ZLS海洋重力仪的滤波延迟时间分别为76s、300s),并采用300s时间窗口对点位数据进行圆滑处理;按野外记录进行基点高程改正并做零点漂移改正;对KSS31M和ZLS海洋重力仪数据全部测线采用即时航向、航速作厄特渥斯校正,并依1985正常重力场公式进行正常场改正;GT-2M海洋重力仪数据不做厄特渥斯改正,根据Helmert公式反算出正常场改正值并进行反向改正后,重新依1985正常重力场公式进行正常场改正;因三种仪器原始数据抖动程度不一,故使用不同长度窗口进行平滑处理,GT-2M海洋重力仪采用3000m窗口,KSS-31M海洋重力仪和ZLS海洋重力仪采用5000m窗口,最后得到自由空间重力异常(张向宇等,2015)。
线上转向
D2测线作业时,因渔船干扰作业,在线上有两次避船转向,第一次是小幅转向,约2min之内偏线70m,第二次是大幅转向,5min偏线378m。对这两次转向的数据分别进行分析,结果见图4,左图为小幅转向的自由空间重力异常,右图为大幅转向的自由空间重力异常。
从图4左图可以看出,小幅转向时KSS31M重力仪的异常幅值高达100mGal,ZLS重力仪也有40mGal左右的变化,而两套GT-2M重力仪的异常幅值仅为约10mGal左右,明显比前两者平缓稳定得多。从图4右图也可以看出,大转时KSS31M重力仪的异常幅值高达200mGal左右,ZLS重力仪也达100mGal左右,而两套GT-2M重力仪的异常曲线还是较为平缓,几乎看不出大的扰动。
综合来看,线上避障碍时KSS31M海洋重力仪与ZLS海洋重力仪的转向数据因厄特渥斯改正效果不佳必须进一步处理后再判断能否保留,否则应予以删除以保证数据质量,而对于GT-2M海洋重力仪来说,只要航速相对稳定,那么其转向数据无需特殊处理即可使用,可以全部予以保留。

图4 (左)线上小幅转向重力异常对比图(右)线上大幅转向重力异常对比图

图5 D1下线拐弯到D2上线前自由空间重力异常对比图
换线转向
海试过程中,D1测线作业时海况较好,而D2测线作业时海况转差,且是旁风旁浪,故截取D1测线下线到D2测线上线前这一段数据进行分析更能发现重力仪转向性能差异,其对比结果见图5。
从图5可以看出,换线转弯时四套重力仪的异常曲线变化趋势是一致的,但KSS31M重力仪和ZLS重力仪的异常曲线波动较大,像KSS31M海洋重力仪的局部振幅就高达150mGal左右,而两套GT-2M海洋重力仪的异常曲线可以说是非常平稳。同时还能看到,虽然KSS31M海洋重力仪的异常振幅偏大,但其稳定速度比ZLS海洋重力仪要快,而GT-2M海洋重力仪比KSS31M海洋重力仪的稳定速度更快。
这里要注意的是,不管是线上避障碍转向还是换线转向,KSS31M海洋重力仪的异常幅值远大于其它型号海洋重力仪的异常幅值是因为其采用的滤波时间仅为76s,是四套重力仪中最小的,其数据抖动度偏大同样是这个原因引起的。
从L3测线往返测量处理后的自由空间重力异常平剖图(图6)可以看出,不同型号重力仪在换线转向后的技术性能和数据特征存在一定差异。
从图6中可以看到,同台重力仪多次测量得到的异常曲线形态都较一致,但在线头处KSS31M和ZLS重力仪均出现了不同程度的假异常,而两套GT-2M重力仪得到的异常曲线则较为平滑。这是由于两台仪器在换线后还未进入稳定状态就上线测量导致的,这种假异常数据在后处理过程中是需要删除的。而完全一致的测量情况下,GT-2M重力仪却没有这种问题,在换线的情况下可快速稳定,不需要对其数据进行删除。KSS31M和ZLS重力仪在测线线尾的假异常也是同样的原因导致的。事实上,这是因为我们截取的下线时间超过了海洋重力调查规范中规定的5min延长下线时间,包括了部分转向数据。线头和线尾处的数据对比充分说明GT-2M海洋重力仪在换线后能迅速稳定,且转向数据精度高于KSS31M海洋重力仪和ZLS海洋重力仪。

图6 L3测线往返测量处理后自由空间重力异常平剖图
结束语
在以往的海洋重力测量中,当测量船上下测线和规避舰船时,即会产生无效重力数据。对这些无效数据段,必须判断清楚,予以剔除(易启林等,2004)。而我们通过对三型四套海洋重力仪各种情况下的转向数据分析认为,GT-2M海洋重力仪通过独特的设计使其在转向后能使得陀螺平台快速稳定下来,从而极大地减小了因航向引起的厄特渥斯效应,其小幅转向数据无需特殊处理即可使用,大幅转向数据在经过处理后能最大程度地得以保留。因此,与其它类型重力仪相比,配备三轴惯导平台上的重力仪有以下两个明显的特点:(1)在转向过程中降低了因厄特渥斯效应而引起的误差;(2)当测线交点正好处在航向航速变化的时间段时也能通过处理获得较合理的自由空间异常数据,从而减小交点差,并最终提高整个测网的精度。
10.3969/j.issn.1001- 8972.2016.15.029
猜你喜欢
黑龙江水利科技(2021年8期)2021-09-03
锦绣·中旬刊(2021年9期)2021-08-31
地震研究(2021年1期)2021-04-13
珠江水运(2020年22期)2020-12-23
科技创新与应用(2020年31期)2020-11-06
土木与环境工程学报(2019年6期)2020-01-13
中国惯性技术学报(2019年6期)2019-03-04
绿色科技(2017年4期)2017-03-23
对联(2011年20期)2011-09-19
对联(2011年10期)2011-09-18