普适性四旋翼飞行器平台的设计与实现
2016-11-04 17:18李浩汉郝慧杰许逸波肖建
科技与创新 2016年18期
李浩汉 郝慧杰 许逸波 肖建


摘 要:由于飞行控制技术限制、硬件平台局限和模块接口不一致等,传统的四旋翼飞行器测试平台在平台搭建、平台调测、平台可复用等方面难以满足当前实验室的测试需要。为此,建立四旋翼飞行器的动力学建模,设计普适性四旋翼飞行器硬件平台,采用飞行器控制器与处理器分离的方案,实现了快速搭建飞行器测试平台,并使用普适性四旋翼飞行器硬件平台,通过简单的处理器软件模块化调用实现了对多个模块的测试。
关键词:四旋翼飞行器;普适性;可复用;模块化
中图分类号:TP368 文献标识码:A DOI:10.15913/j.cnki.kjycx.2016.18.104
随着嵌入式处理器技术、传感器技术和自动控制技术的快速发展及其在实际工程中的广泛应用,微小型无人机技术也逐步趋向高集成度和多功能化。在当前研究较多的空中机器人中,四旋翼飞行器因其简洁的机械结构和灵活的飞行特性,已经成为了理论研究领域和实验室仿真、测试方面的热点内容。同时,多年来,四旋翼飞行器已经成为了各类科技竞赛的常规赛题,激发和带动了无数的人才投入到相关领域的研究中。此外,四旋翼飞行器也在军用和商用领域扮演着越来越重要的角色,发挥着越来越大的作用。
在传统的实验室仿真、测试和科技竞赛中,受研究水平和研究条件等方面的限制,很难实现对四旋翼飞行器在软硬件和机械部分的可靠性保证。另外,鉴于硬件平台局限和模块接口不一致等,传统的四旋翼飞行器测试平台也逐渐暴露出更新换代不便捷、利用率不高和可复用性差等方面的弊端。为此,本文在保证各个功能单位模块化和各个软硬件接口一致性的前提下,依托嵌入式处理器技术和CAD技术,通过硬件设计及仿真和软件模块化设计,提出了一种普适性比较高的四旋翼飞行器平台。该平台可以提高四旋翼飞行器平台的开发效率和利用率,并且可以在多种软硬件平台间复用。
1 四旋翼飞行器平台总体设计
四旋翼飞行器平台的功能需求如图1所示。该平台软件部分包括四旋翼飞行器的姿态解算部分和核心控制算法层,以及1个PC端的应用层工具。硬件部分包括各个功能模块的设计及其驱动层设计与实现。本平台采用全向余弦矩阵解算欧拉角的方法进行姿态解算,并通过PID控制实现对飞行器姿态的控制。硬件部分采用Altium Designer设计电路,并进行电气仿真,驱动层采用嵌入式开发环境结合主控制器开发环境进行设计。
该平台所有的软件函数接口和硬件电气接口均采用统一的标准接口,功能单元设计也遵从接口兼容和模块化的原则。
2 软件部分设计
2.1 PID控制简述
在过程控制中,按照偏差的比例(P)、积分(I)和微分(D)控制的自动控制器称为PID控制器。在实际工程中,其应用比较广泛。它的原理简单,易于实现,适用面广,控制参数相互独立,参数的选定比较简单。PID控制是连续系统动态品质校正的一种有效方法,PID算法主要可分为增量式算法、位置式算法。其中,位置式算法可以直接用于过程控制,在追踪算法输出方面更方便;增量式算法则减少了运算量,故障影响范围小,不会严重影响运动过程。
2.2 飞行器姿态解算方法
机体坐标系和地面坐标系如图2所示。
刚体运动时,可以通过欧拉角变换测得当前姿态。如图2所示的2个坐标系,1个是地面参考系,1个是飞机体参考系。对于任意Q向量,相对于机体参考系得到向量QP和相对于地面参考系的向量QG。由旋转矩阵R得到相应的关系式:
得到飞行器的姿态后,即可通过由嵌套的PI-PID算法循环来控制。优化内部的PID循环对保证飞行的良好性和稳定性至关重要。外部PID循环不敏感会影响飞行的样式(快或慢),而内部PID循环则要计算出所需的旋转角速度,并且与原始陀螺仪数据比较,将差异反馈给PID控制器,然后发送到电机修正旋转。这是比率(ACRO)模式、稳定模式和其他所有模式的核心,也是飞行器中最关键的增益值。
本文提出的四旋翼飞行器平台采用OV7620摄像头采集图像数据,并通过主控制器的串口发送至PC端应用层串口工具,PC端实时显示从四旋翼飞行器平台传输过来的摄像头图像数据。
3 硬件部分设计
3.1 四旋翼飞行器主控模块
该平台采用瑞萨的嵌入式控制器R5F100LEA作为主控,由于瑞萨系列MCU具有较高的可靠性,其在车载平台中得到了广泛的应用。该主控具有高速32 MHz时钟、12位间隔定时器和64 K RAM,支持自编程功能,可在线调试,内置乘除法器、乘加法器、按键中断、16位定时器、串行接口和8/10位分辨率A/D转换器,可以满足平台的工程需求。
3.2 摄像头模块
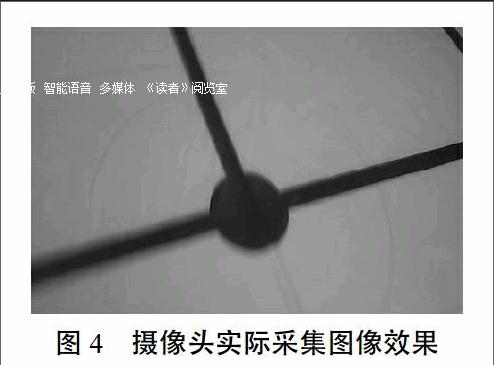
考虑到该平台在实验室测试时,图像采集和视频图像处理部分仅涉及到颜色的灰度值,并由灰度值取阈值构成逻辑判断,颜色数据比较小,所以,平台采用摄像头集成模组FIFO-OV7620作为摄像头模块。该模组自带FIFO,由CMOS 摄像头模块OV7620和FIFO模块AL422组成,有效解决了摄像头与主控模块之间的数据读取不同步的问题。摄像头实际采集图像效果如图4所示。
3.3 定高模块
该平台需要在实验室等室内环境中实现定高飞行等功能,可供选择的定高传感器模块有气压传感器模块、近红外定高模块和超声波声纳模块。其中,气压传感器模块的精度不能满足实验室室内调测的要求,而近红外定高模块成本比较高。综合考虑平台所需精度和可靠性的问题,本文将超声波声纳模块作为四旋翼飞行器平台的定高模块。
4 结束语
本文提出了一种普适性的四旋翼飞行器平台,它包括姿态解析算法、自动控制算法、主控制器模块、摄像头模块和超声波声纳模块等。平台采用统一的软件函数接口和硬件电气接口,可以提高平台的快速搭建和便捷定制的能力,提高模块更新换代的兼容能力,从而提高整个四旋翼飞行器平台的普适性、稳定性、可复用性和可定制性。通过模块化编程和硬件模块化设计,可以在不同环境下,通过快速便捷地更改模块和增减代码来满足多种测试和任务要求。因为平台具有普适性和便捷性的优点,所以,能够保证平台胜任自动控制理论领域、嵌入式处理器技术领域等的研究,以及各种科技类竞赛的实验室仿真验证和测试方面的工作。
参考文献
[1]张镭,李浩.四旋翼飞行器模糊PID姿态控制[J].计算机仿真,2014,31(8):73-77.
[2]Fernando H.C.T.E.,De Siliva A.E.A.,De Zoysa M.D.C.,et al. Modelling,Simulation and Implementation of a Quadrotor UAV.2013 IEEEE 8th International and Information Systems,Sri Lanka.IEEE,Piscataway,USA,2013:207-212.
[3]梁雪慧,闫粉粉,邵晓龙.模糊自整定PID在四旋翼飞行器姿态控制中的应用[J].工业仪表与自动化装置,2015(6):23-25.
[4]叶树球,詹林.基于PID的四旋翼飞行器姿态控制系统[J].计算机与现代化,2015(237):117-120.
[5]Choi Y.C.,H.S.Ahn.Nonlinear Control of Quadrotor for Point Tracking:Actual Implementation and Experimental Tests.IEEE/ASME Transactions on Mechatronics,2015,30(3):1179-1192.
[6]廖懿华,张铁民,廖贻泳.基于模糊-比例积分偏差修正的多旋翼飞行器姿态测算系统[J].农业工程学报,2014,30(20):19-27.
〔编辑:白洁〕
猜你喜欢
商业评论(2022年4期)2022-05-05
中国建筑金属结构(2019年4期)2019-05-15
汽车博览(2019年5期)2019-05-07
分析化学(2018年12期)2018-01-22
教育教学论坛(2017年51期)2017-12-27
成长·读写月刊(2017年11期)2017-11-25
赤峰学院学报·哲学社会科学版(2014年6期)2014-09-21
中国信息化·学术版(2013年1期)2013-05-28
中国计算机报(2009年7期)2009-05-07