
ENVI LiDAR支持下利用机载LiDAR点云提取建筑物★
2016-11-03 02:41:44贺清清
山西建筑 2016年23期
张 杰 贺清清 王 飞
(中国矿业大学环境与测绘学院,江苏 徐州 221116)
ENVI LiDAR支持下利用机载LiDAR点云提取建筑物★
张 杰 贺清清 王 飞
(中国矿业大学环境与测绘学院,江苏 徐州221116)
对机载激光雷达测量技术、ENVI LiDAR软件、建筑物提取流程进行了介绍,以ISPRS第三委员会提供的机载激光雷达点云数据为基础,基于ENVI LiDAR 5.1对实验区的建筑物进行了提取,并通过ArcGIS结合同地区影像对其质量进行评价,实验流程及结果有一定的参考意义。
ENVI LiDAR,机载LiDAR,建筑物,影像数据
0 引言
于2015年4月7日,我国住房城乡建设部办公厅和科学技术部办公厅联合对外公布确定了第三批共84个2014年度国家智慧城市新增试点,加上住房城乡建设部前两批公布的193个国家智慧城市试点,目前我国的智慧城市试点已接近300个[1]。从建设数字城市到建设智慧城市的提出,城市的三维地理信息,尤其是与人类活动密切相关的建筑物一直是其中重要的基础空间信息,是城市信息化的研究重点。对以建筑物为主体进行的提取、建模,将服务于城市规划、军事等领域,有利于智慧城市的建设。
1 机载激光雷达简介
机载激光雷达(Light Detection And Ranging, LiDAR)测量系统主要包括:观测平台(飞机等)、动态差分GPS(Global Positioning System)、姿态测量单元IMU(Inertial Measurement Unit)、激光扫描测距系统(Laser Range Finder)及多光谱成像仪等。由于激光具有一定穿透性并且仪器在作业的过程中可以捕获多次回波信息,其获取的激光点云能够真实的反映地表信息,密集的激光脚点能够较好地表现出建筑物、树林等地物。作为一种可快速、高效、大范围实时获取高精度三维点云的测量方法,被广泛应用于地形测绘、灾害评估与监测、城市三维建模、数字电网、古建筑文物保护等领域。
常用的LiDAR点云数据格式包括标准的LAS,ASCII的PTS,二进制的BIN及文本格式TXT。点云数据主要由扫描点的坐标信息、点的回波次数及回波强度信息等构成。
2 ENVI LiDAR简介
ENVI LiDAR作为美国Exelis Visual Information Solutions公司旗舰产品ENVI(The Environment for Visualizing Images)[2]的新扩展,是高级的LiDAR数据浏览、处理和分析工具,能快速准确的从LiDAR数据中提取三维信息,提取出的信息可在其他平台下(如ENVI,ArcGIS)进行进一步的使用和分析[3]。
其主要可用于实现LiDRA点云的查看及点密度、覆盖率分析;点云的分类(分为建筑物、植被、树、电力线、电线杆、桥梁、地面等);分类目标物矢量化及提取结果的修正;DTM(Digital Terrian Model),DSM(Digital Surface Model)的构建及显示;交互式截面可视化、可视域分析、三维可视化飞行浏览及编辑;丰富的产品(包括DTM,DSM等地形数据,等高线、建筑物、树、电力线等矢量数据,点云正射影像等)输出等[3]。
ENVI LiDAR提供了一种快速浏览、分析、处理LiDAR点云数据的途径,其界面友好简洁,交互式、简单的操作流程使得其应用广泛。此外,ENVI LiDAR允许用户根据需要,自己通过创建IDL(Interactive Data Language)工程文件来编写实现指定功能,这极大地丰富了软件处理数据的方法,使其具备良好的二次开发能力。
3 建筑物提取路线及操作流程
3.1LiDAR点云中提取建筑物
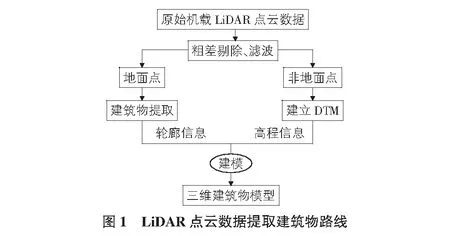
从机载激光雷达点云中提取建筑物,主要包括建筑的提取和建筑物的矢量化。一般方法是先将LiDAR点云数据栅格化为深度影像DSM,进一步求得规则化nDSM,再利用图像的分割算法及边界线提取算法等图像分析手段实现轮廓线提取[4,5],其流程概括为图1。
3.2操作流程
ENVI LiDAR作为一款高集成的软件,其操作简单,对用户要求不高,从工程的创建到数据的处理及导出,均无需太多干预。针对LiDAR点云处理的操作流程如图2所示。

4 实验与结果分析
4.1实验数据
实验数据为ISPRS-Commission Ⅲ提供的官方测试数据(实验区位于德国斯图加特市法新根区),其中包括于2008年8月21日获得的机载LiDAR点云数据和2008年8月6日获得的航空影像数据。其中LiDAR点共计约1.856千万个,高程差值约为420 m,两种数据具体参数见表1。

表1 实验数据参数
具体的,点云数据处理时,各参数均采用ENVI LiDAR中的默认值,关于建筑物提取的参数见表2。

表2 ENVI LiDAR中数据处理时建筑物设置参数
4.2结果分析
由于原始数据量庞大,按照默认参数值初次完成数据处理后,在ArcGIS中将原始影像图和利用ENVI LiDAR提取出来的建筑物面状矢量文件进行二阶多项式地理配准(叠加),并从中截选出具有代表性的两个区域(如图3,图4所示)用于对建筑物提取的质量作评价。


在两个区域中,如图3a)所示,区域1的建筑物顶面多为人字形,结构比较简单、轮廓相对完整,单独建筑物面积较大,建筑物
上空并未有太多的遮挡、紧邻建筑物的四周高大树木及其他设施较少。如图3c)所示,除a,b和c三处建筑物提取不完整及d处漏检外,其他建筑物面状域均与影像很好的叠合。如图4a)所示,区域2中的建筑物结构明显复杂很多,而且周围高大树木较多,部分建筑物上空被明显遮挡。在图4c)中可以看出除结构简单的g处能够完整提取外,i处出现漏检,其他例如e,f,h等处均出现严重的“碎片化”现象。
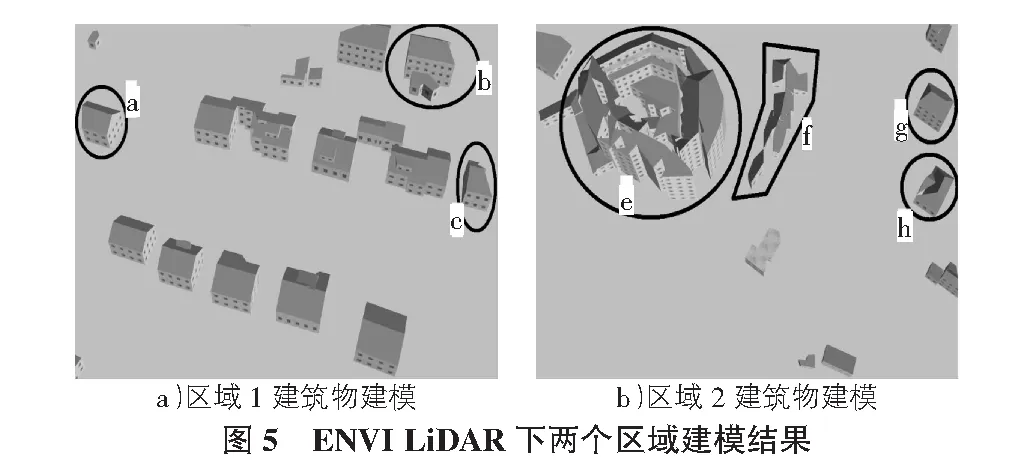
结合ENVI LiDAR三维视图下的建筑物建模结果,如图5所示,可以看出在ENVI LiDAR下利用点云进行建筑物提取时,受建筑物自身结构复杂程度、邻近其他地物地貌的影响很大,按照默认参数值提取时并不能达到理想的效果,需要后续多次尝试设置不同参数并进行手动修正。总的来说,软件操作过程虽然简单,但在应对不同地形条件方面,仍有很大的改进空间。
5 结语
机载LiDAR为获取实时、海量、大范围地理空间信息,提供了一条可行的、适合的途径,其数据采集作业模式相对成熟,也已被普遍重视。而数据的后处理,乃至数据的挖掘工作,以ENVI LiDAR为例,仍需不断提高。此外,由于LiDAR数据缺乏重要的纹理信息,作业过程具有一定盲目性,而影像数据受作业模式、效率、精度等影响,可以看出,多源数据的互补、融合将是今后发展的必然趋势,只有这样才能真正的体现各种数据的价值,才能更好地实现包括建筑物等的信息化并服务于各行各业。
[1]国家智慧城市2014年度试点名单公布[J].建设科技,2015(7):6.
[2]屈为刚.ENVI软件制作SPOT5遥感正射影像图方法初探[J].山西建筑,2014,40(21):223-225.
[3]http://blog.sina.com.cn/s/blog_764b1e9d0100vph4.html.
[4]谷国涛.基于机载LIDAR点云的建筑物三维建模技术研究[D].南昌:东华理工大学,2012.
[5]杨鹏.基于机载LiDAR点云数据的建筑物提取与建模研究[D].鞍山:辽宁工程技术大学,2013.
Extraction of building by airborne LiDAR point cloud with support of ENVI LiDAR★
Zhang JieHe QingqingWang Fei
(SchoolofEnvironmentScienceandSpaticalInformatics,ChinaUniversityofMiningandTechnology,Xuzhou221116,China)
Technology of Airborne LiDAR (Light Detection And Ranging), the ENVI LiDAR and the process of building extraction are introduced briefly in this paper. Then, based on the International Society for Photogrammetry and Remote Sensing(ISPRS) commission Ⅲ and ENVI LiDAR 5.1, the buildings in testing area were extracted. The evaluation results of quality was learned by overlaying the buildings onto the image in same place through ArcGIS, and the process and results thereof have certain
ignificance.
ENVI LiDAR, airborne LiDAR, building, image data
1009-6825(2016)23-0211-02
2016-06-04★:江苏高校优势学科建设工程资助项目(项目编号:SZBF2011-6-B35)
张杰(1992- ),男,在读硕士;贺清清(1991- ),男,在读硕士;王飞(1992- ),男,在读硕士
TU198
A
猜你喜欢
北京测绘(2022年5期)2022-11-22 06:57:43
汽车观察(2021年8期)2021-09-01 10:12:41
铁道建筑技术(2021年4期)2021-07-21 05:33:36
中学生数理化(高中版.高考理化)(2020年11期)2020-12-14 07:36:02
小学生学习指导(低年级)(2019年9期)2019-09-25 07:43:18
中国交通信息化(2019年1期)2019-03-26 06:43:46
电子制作(2018年17期)2018-09-28 01:56:44
电子制作(2018年16期)2018-09-26 03:27:00
通信电源技术(2018年5期)2018-08-23 01:15:36
小天使·二年级语数英综合(2015年12期)2015-12-04 16:36:12
