基于改进遗传算法的汽车主动悬架控制器设计
2016-10-31 08:43:18孙冬梅
计算机测量与控制 2016年4期
曾 理,孙冬梅,周 兵
( 南京工业大学 自动化与电气工程学院,南京 211816)
基于改进遗传算法的汽车主动悬架控制器设计
曾理,孙冬梅,周兵
( 南京工业大学 自动化与电气工程学院,南京211816)
为解决在汽车主动悬架系统中所采用的一般模糊控制策略自适应能力差的特点,提出了一种可以自适应调节的模糊控制策略,采用解析式模糊规则法;利用新型的改进遗传算法优化不同状态下误差与误差变化率的修正因子,从而找到最优的模糊规则,匹配当前状态下最佳模糊控制器的参数;利用Matlab/Simulink对主动悬架系统进行了仿真,结果表明该控制器相较于一般模糊控制器可以有效地改善汽车悬架在不同行驶状态下的稳定性和平顺性,通过优化过后的控制系统有较强的鲁棒性和较好的适应性。
主动悬架;模糊控制;改进遗传算法;修正因子
0 引言
汽车悬架系统性能的优劣直接影响着汽车行驶状态下的平顺性和操作稳定性。较以往传统的被动悬架在汽车的行使过程中,其悬架刚度和阻尼是固定的无法调节,很难满足乘坐舒适性和操纵安全性的要求。而主动悬架能够根据汽车的行驶状态和路面激励的大小产生相应的悬架控制力[1],使悬架的性能始终保持在最佳状态,能够改善汽车运行时的不稳定性和车身的抖动性。对汽车主动悬架系统的控制策略进行研究已成为了悬架控制领域的重要研究方向。
考虑到汽车主动悬架系统具有非线性特征,其复杂的数学模型难以精确描述,不适用于一般的控制方法如天棚阻尼控制、最优控制等[2]。而采用模糊数学基本思想和理论的模糊控制方法尤其适用于这种非线性,多自由度变量的控制系统。近几年来,一些国内外文献[3-5]利用模糊控制方法对主动悬架做了实验仿真,均论证了采用模糊控制方法可以达到预期的控制效果。模糊控制的关键在于模糊规则的确定,本文通过改进的遗传算法优化模糊规则,使得汽车主动悬挂控制系统在不同状态下能够获得最优的控制策略。
1 主动悬架仿真参数建模
1.1主动悬架系统建模
对主动悬架的研究,四分之一悬架是最简单有效也最为适宜的模型。其能很好的描述汽车悬挂性能的3个评价指标,基于上述情况,本文参阅以往文献[7]建立两自由度的1/4简化模型如图1所示。其运动微分方程为:
(1)
(2)
式中,m1、m2为簧上、簧下质量;k1为悬架刚度;k2为轮胎刚度;cs为悬架阻尼;z1、z2为簧上、簧下质量垂直位移。
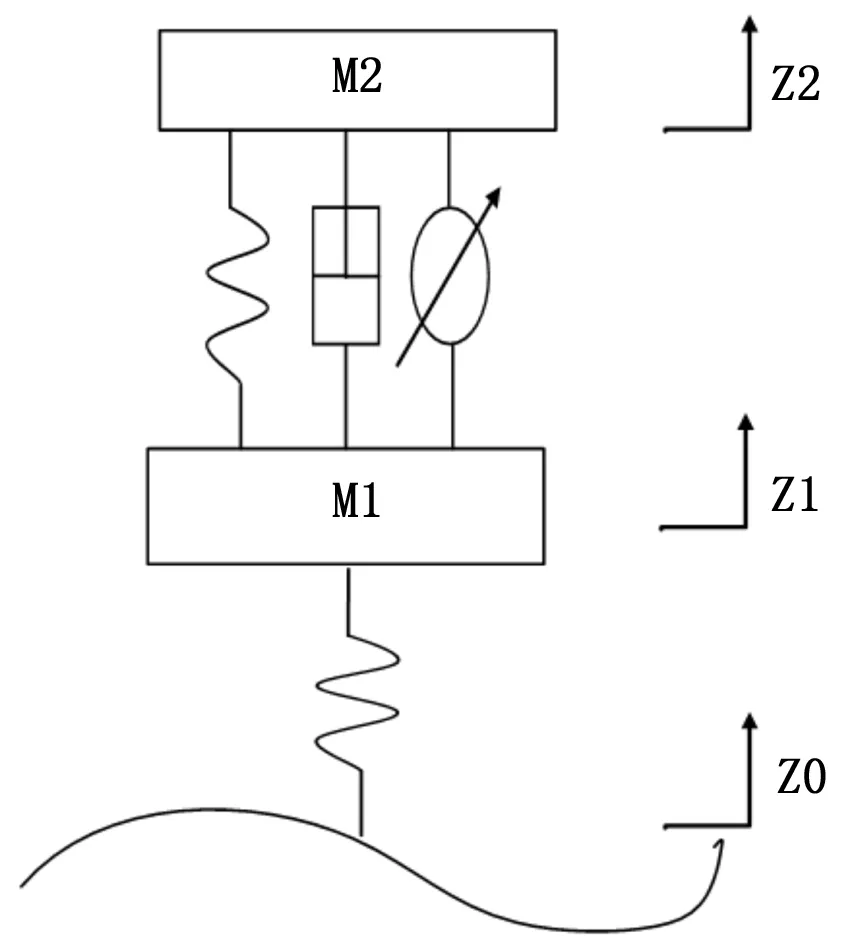
图1 悬架系统简化模型
1.2路面模型的建立
根据以往文献[8]对悬架控制系统研究中,一般都会选取随机不平路面作为激励源。随机不平路面可以用积分白噪声表示,其时域模型为:
其中:n0=0.1为标准空间频率,Φx(n0)为路面谱密度不平度系数,v为汽车行驶速度,w(t)为白噪声激励。
2 基于改进的遗传算法的模糊控制器
模糊控制结构[8]主要包括4个部分:输入输出的模糊化,模糊规则的确定,模糊推理,反模糊即清晰化。本文基于遗传算法的主动悬架控制系统的结构如图2所示。
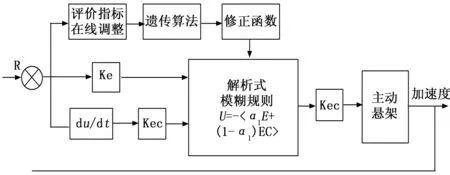
图2 主动悬架控制系统结构框图
2.1主动悬架模糊控制器设计
2.1.1模糊控制的语言变量和隶属度函数的确定
车辆的行驶平顺性能是由悬置质量的加速度响应来评价,因而本文选取悬置(即车身)的垂直加速度和其变化率作为模糊控制器的输入语言变量,记作e,ec;将主动悬架控制器的作用力作为输出语言变量记为u。将输入输出模糊变量的模糊论域选取为[-33];定义输入输出模糊变量的模糊语言子集为{NB,NM,NS,ZO,PS,PM,PB}。
该控制器选用三角形隶属函数作为描述模糊集合的隶属函数,因为其数学表达式简单,方便运算,相比其他隶属函数占用内存较小,在输入变化时灵敏度比正态分步的隶属函数都要高,可以及时得到输出[8]。根据实际变量的变化范围以及与之相对应的模糊论域范围,可确定量化因子Ke、Kec和比例因子Ku的取值。
2.1.2模糊规则表建立
在实际情况中,某些汽车主动悬架系统为了提高自身对不同路面状态下适应性能,因此需要一种能够可调整参数的模糊控制器。许多文献在对模糊控制规则确定中也都利用了解析式法,如U=-<α1E+(1-α1)EC>来建立模糊规则,即通过调整修正因子,改变偏差E和偏差变化率EC的加权适度,从而对模糊控制规则进行调整[8]。
本文有2个7模糊子集的输入变量,可构成49条模糊规则。针对主动悬架模糊控制系统,根据以往的专家经验建立一个尚未优化的模糊规则如表1所示。
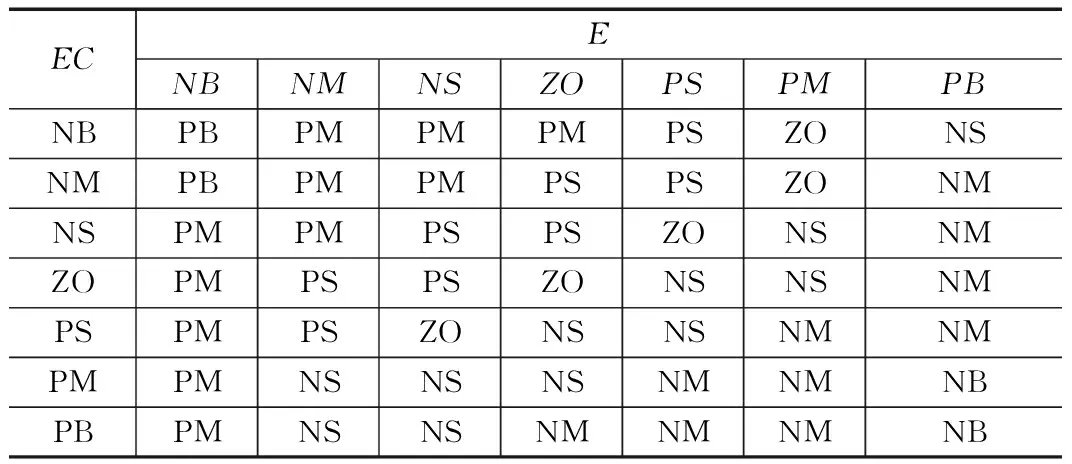
表1 优化前的控制规则
汽车在随机路面激励下,悬架控制系统参数时刻发生变化,对控制规则中不同阶段的误差以及误差的变化率的修正因子要求不同,因此根据误差等级引入不同的修正因子。本文采用具有4个修正因子的模糊控制器。其模型解析式如式3所示:
(3)
其中:α1,α2,α3,α4∈(0,1)。
由上述可知,α值的大小直接表示了误差E和误差变化率EC的加权程度,改变控制规则十分方便。但α的值确立仍然是以经验为依据,不可回避地带有一定的盲目性,很难得到最优值。为此本文选用遗传算法来优化修正因子,对模糊控制规则进行自调整,使得在不同控制条件下让控制系统获得最佳控制策略,进而达到最优控制效果。
2.2改进的遗传算法对修正因子寻优
利用遗传算法对修正因子进行优化,具体是在C级路面随机激励下,结合改进的遗传算法优化好的参数在线改变控制系统仿真参数,实现模糊控制器的优化。具体算法设计流程如图3所示。
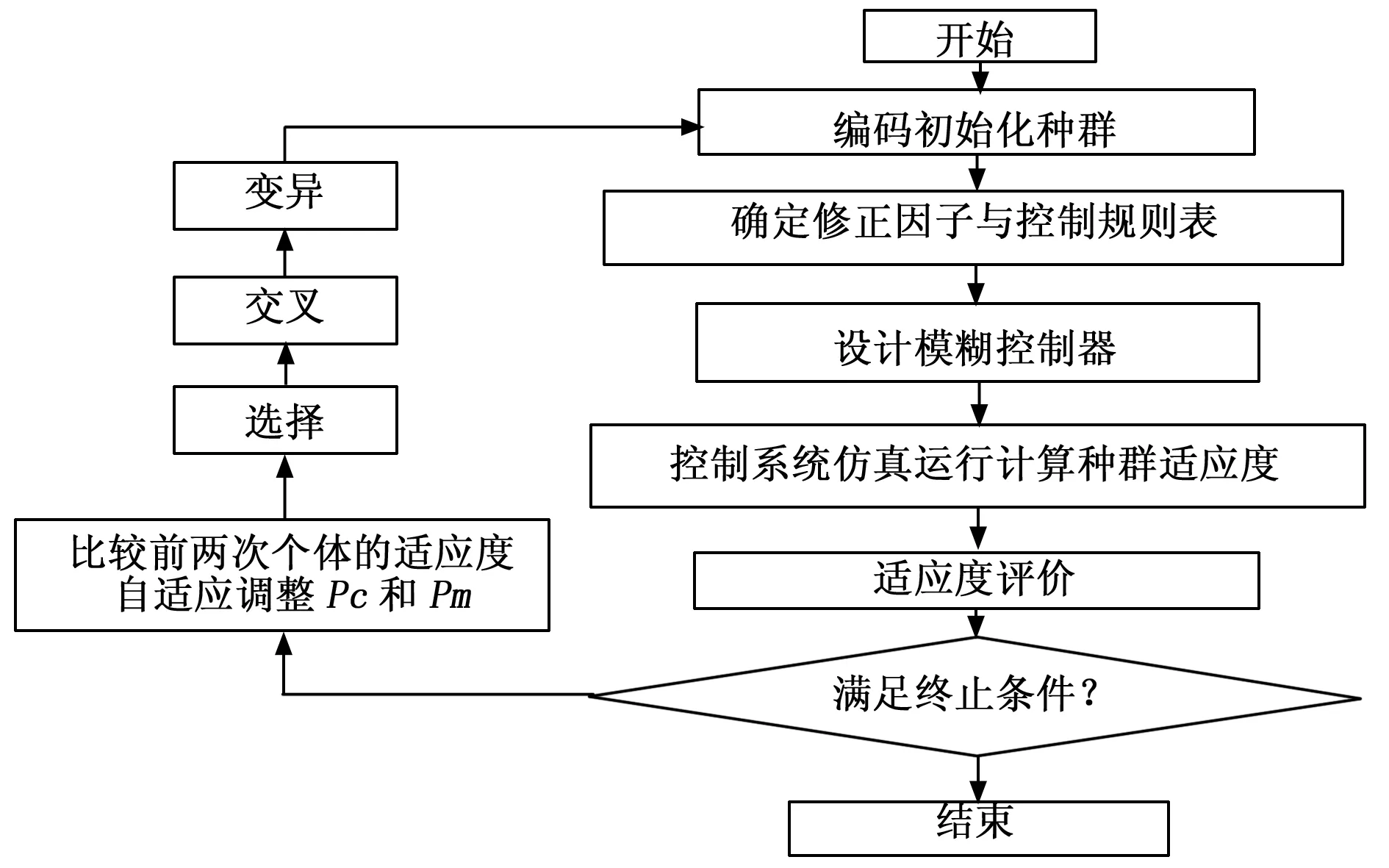
图3 修正因子优化算法流程图
1)编码初始种群的产生:对待寻优的修正因子采用实数编码形式编码,对于连续变量的优化问题,采用实数表示比较自然,且计算精度不会受编码方式的影响。其优化修正因子的约束条件为α1,α2,α3,α4∈(0,1);且α1<α2<α3<α4。
(4)
3)动态选择交叉变异策略:在标准遗传算法中,交叉概率Pc和变异概率Pm对种群进化起着重要的作用。选择较大的交叉概率可以加快新个体产生速率,但使具有高适应度值的个体不能被遗存下来,而选择较低的交叉概率又会放缓整个搜索过程,因此一般取交叉概率为0.4~0.9之间[9],而对于变异概率来说,过小的取值不易产生新的个体结构,过大的取值容易破坏已有的优良个体,因而变异概率Pm取值范围在0.001~0.5之间。
在遗传算法优化修正因子的过程中,为了提高遗传算法的全局最优性,需要保持遗传种群的多样性。在算法进化时除算法的先交叉后变异基本步骤外,还通过增加交叉算子和变异算子分别对父代种群操作。将新个体和保存的父代个体按“父子混合选择策略”进行选择,如图4所示。父代将所有个体分别进行交叉、变异操作产生交叉新个体、变异新个体,与最优保存的父代个体一并竞争,通过比较适应度选择较优良个体作为子代种群。在整个遗传操作过程中,既能够保留优良个体又避免了交叉、变异概率对优良个体的破坏。
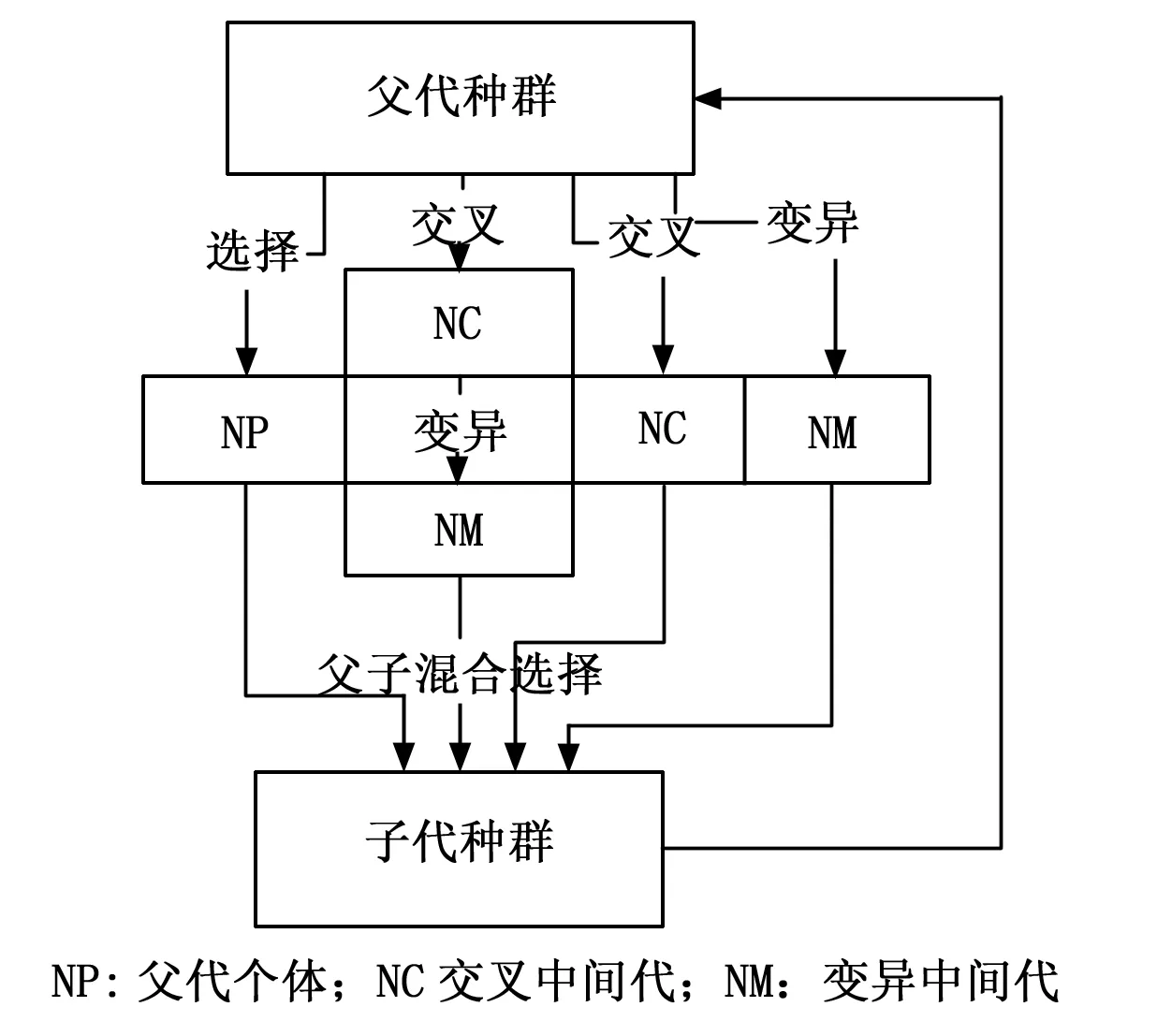
图4 父子混合选择策略
3 悬架控制系统仿真与结果分析
3.1悬架系统仿真
本文提出的基于遗传算法的主动悬架控制系统仿真如图5所示,该仿真图是在Simulink环境下建立路面模型和模糊控器,用MATLAB语言编写遗传算法部分对该模型中模糊控制规则进行优化。本文以车身垂直加速度、悬架动挠度和车轮动载荷为系统的评价指标,分别对优化前优化后模糊控制的主动悬架及被动悬架进行仿真,表2为主动悬架的模型参数。

表2 主动悬架的模型参数
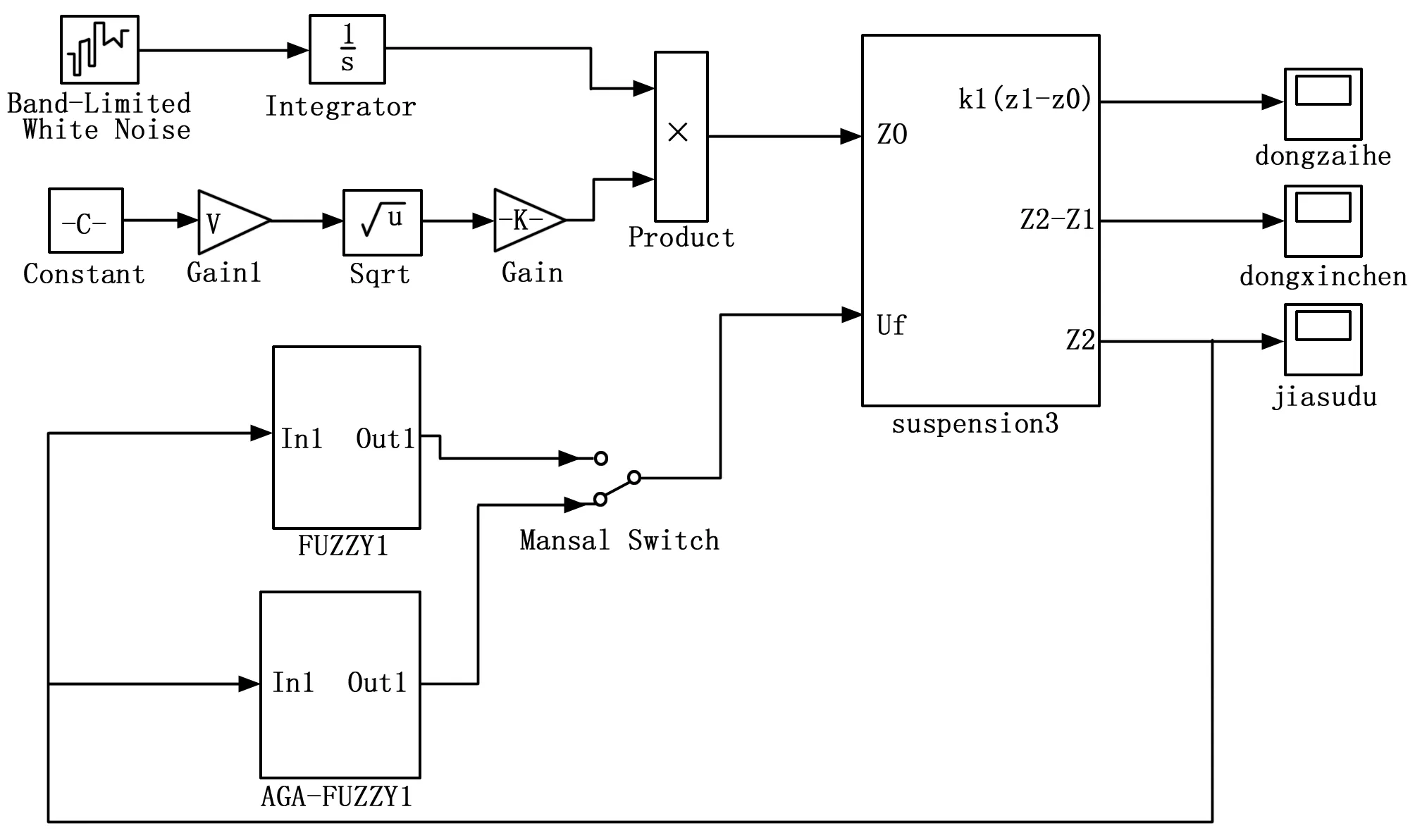
图5 系统仿真
本文搭建的仿真系统是让悬架系统以25 m/s作为仿真车速,当采用C级路面时,路面不平度系数Φx(n0)=256×10-6,利用Matlab/Simulink建立白噪声模型,仿真得到路面幅值变化时域如图6所示。
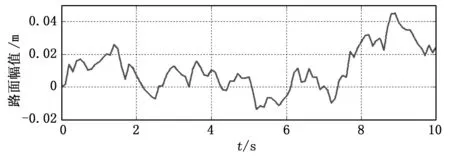
图6 路面随机激励25 m/s2
按照上述遗传算法进行Matlab编程,在计算机上进行仿真计算,经过多次迭代以后,对带有多个加权因子的模糊控制规则使用改进的遗传算法进行寻优处理,得到的一组仿真参数如(5)所示:
(5)
将优化后的修正因子带入设计的解析式模糊控制器中,得到优化后的模糊控制规则如表3所示。
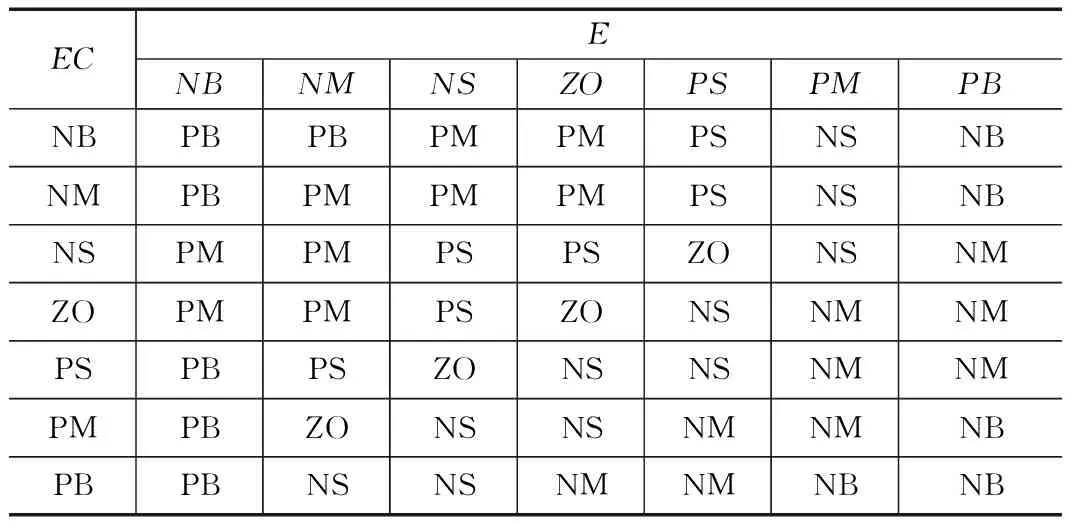
表3 优化后的模糊控制规则
3.2仿真结果分析
以C路面激励,分别对被动悬架、模糊控制主动悬架和优化后的模糊控制的主动悬架进行仿真,其仿真结果如图7~图9所示。并根据仿真结果对这3种情况下各模型的车身加速度、悬架动行程、轮胎动载荷的均方根值进行对比,对比参数如表4所示。
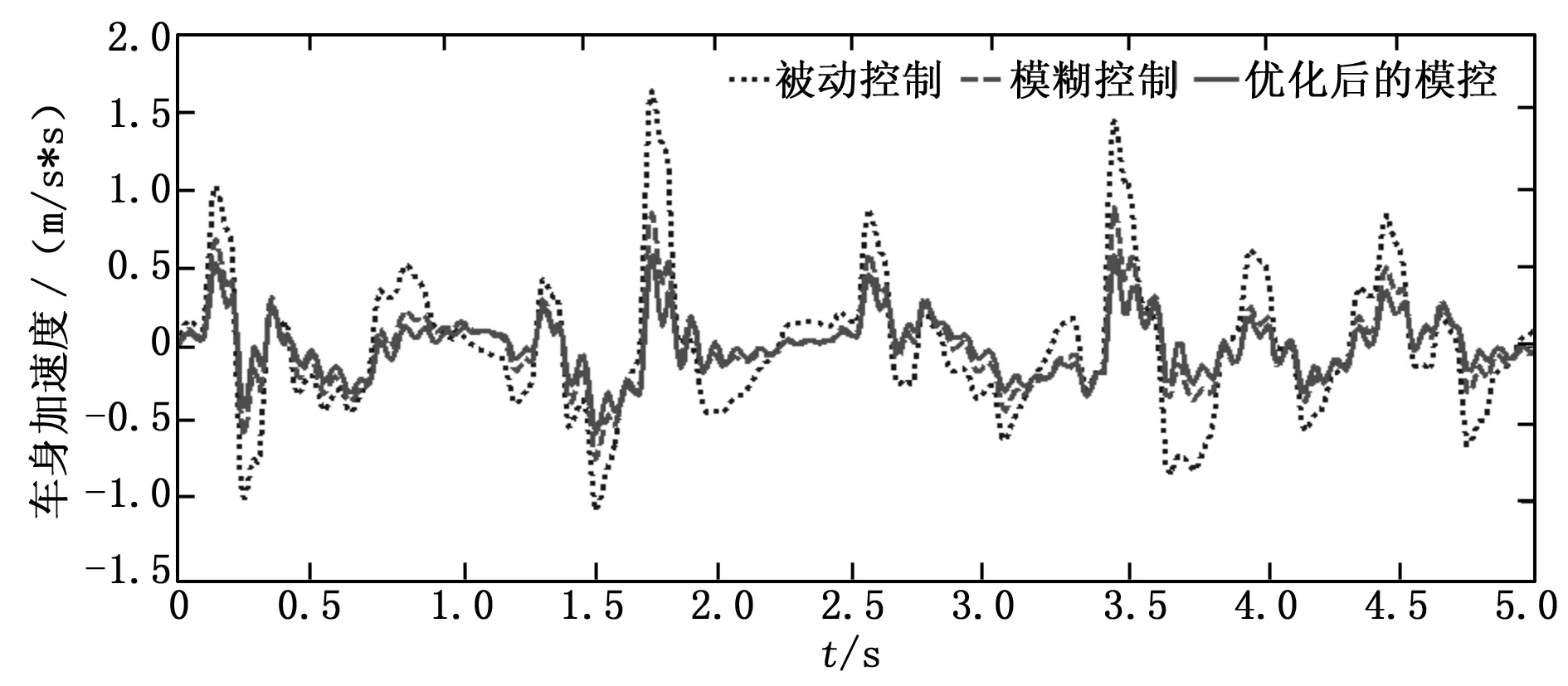
图7 车身加速度
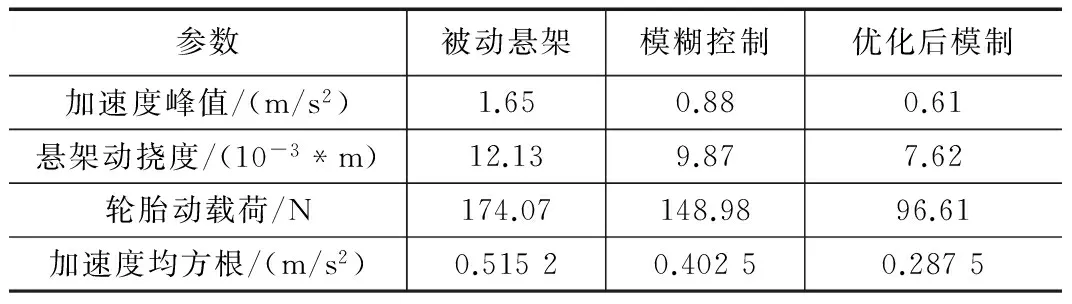
参数被动悬架模糊控制优化后模制加速度峰值/(m/s2)1.650.880.61悬架动挠度/(10-3*m)12.139.877.62轮胎动载荷/N174.07148.9896.61加速度均方根/(m/s2)0.51520.40250.2875
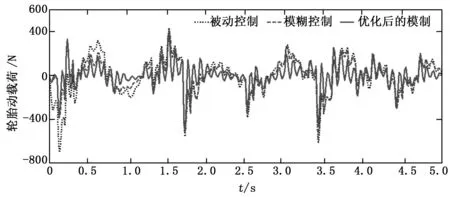
图8 轮胎动载荷
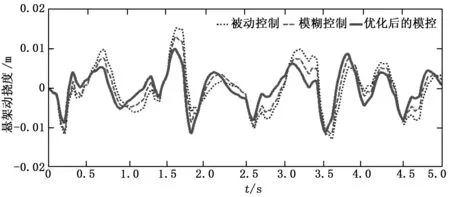
图9 悬架动挠度
从仿真图可以看出,与被动悬架相比较,两种模糊控制策略均能有效地改善车身悬架性能的3个评价指标。对比3种控制系统的参数表4可知,采用两种模糊控制策略都大大降低了搭载被动悬架的其车身垂直加速度峰值,验证了模糊控制策略的可行性,但本文设计的优化后模糊控制器又较普通模糊控制器,其控制的车身垂直加速度峰值又从0.88降低到0.61,其加速度均方根值也降低近29%,说明采用优化后的模糊控制器能够更有效地减缓车身振动,提高车辆乘坐舒适性。
采用两种控制策略的悬架动挠度均方根值都小于被动悬架,且有效地控制在最大悬架动挠度均方根值(0.02 m)范围内,车辆运行时没有撞击限位块,但优化后的模糊控制器将动挠度又降低了22%。其轮胎动载荷参数比一般模糊控制提高了38%,大大降低了对轮胎的冲击力。
综上所述,结果表明基于改进遗传算法的主动悬架系统模糊控制相较一般模糊控制策略能够显著改善汽车的行驶平顺性,验证了本文提出优化过程的有效性和可行性,提高了模糊控制器的适应性和鲁棒性。
4 结束语
本文引进了修正因子,通过改进的自适应遗传算法优化不同的状态的误差与误差变化率的加权适度,改善了控制器性能,并与以往大部分文献所运用的主动悬架模糊控制系统进行了比较,通过实验仿真,结果表明优化后的主动悬架的3个性能指标在原有基础上得到了较大的提升,并且也为进一步考虑针对悬架控制系统的其他参数如隶属度函数和模糊规则一并优化提供了有新的有效方法。
[1] 喻凡.汽车系统动力学[M].北京:机械工业出版社,2005.
[2] 刘栋,唐焱,顾慧芽.汽车主动悬架控制系统的发展研究[J].液压气动与密封,2010,30(5):21-25.
[3] 潘公宇,陈立付,聂秀伟,等.空气主动悬架模糊控制仿真与实验研究[J]. 机械设计与制造,2011(1):198-200.
[4] Du H P,Zhang L.Fuzzy control for nonlinear uncertain electro-hydraulic active suspensions with Input constraint [J]. IEEE Transactions onFuzzy Systems,2009,17(2): 343-356.
[5] Kuo Y P,Tzuu-Hseng S. Li.GA-based Fuzzy PI/PD Controller for Automotive Active Suspension System [J]. IEEE Transactions On Industrial Electronics,2005,46(6):1051-1056.
[6] 王威,薛彦冰,宋玉玲,等.基于GA 优化控制规则的汽车主动悬架模糊PID控制[J].振动与冲击,2012,31(22):157-162.
[7] 陈龙,周立开,江浩斌,等.基于模糊动态模型的半主动悬架控制系统设计及稳定性分析[J].机械工程学报,2008,44(2): 113-117.
[8] 石辛民,郝整清.模糊控制及其MATLAB仿真[M].北京:北京交通大学出版社,2008.
[9] 王小平,曹立明.遗传算法—理论、应用与软件实现[M] .西安:西安交通大学出版社,2002.
Design of Controller of Active Suspension Based on Improved Genetic Algorithms
Zeng Li,Sun Dongmei,Zhou Bing
(School of Automation and Electrical Engineering,Nanjing University of Technology,Nanjing211816,China)
To solve poor self-adaptive of common fuzzy logic strategy adopted by the active suspension of vehicle,the paper puts forward the fuzzy logic strategy with adaptive control characteristics,which use fuzzy control rule of analytical formula. The correction of error and error rate which is two input of fuzzy controller in different state is optimized by the new improved genetic algorithm,in that the optimal fuzzy control rule of the controller is found. The active suspension system with improved fuzzy logic controller was simulated by Matlab/Simulink. The simulation results demonstrate that the suspension with the fuzzy logic controller can effectively improve vehicle’s riding performances and handling performance compared with conventional passive suspension and the active suspension with common fuzzy logic controller. The controller by optimized has strong robustness and stability.
active suspension; improved genetic algorithm; fuzzy control;correction
1671-4598(2016)04-0058-03DOI:10.16526/j.cnki.11-4762/tp.2016.04.018
TP273
A
2015-06-25;
2015-07-28。
江苏省人事厅江苏省博士后资助计划(1201012C);江苏省科技支撑计划项目(BE2011188)。
曾理(1989-),男,江苏南京人,硕士,主要从事控制工程,以及悬架控制系统智能优化算法方向的研究。
孙冬梅(1975-),女,博士,副教授,主要从事控制学科理论研究以及智能工业检测技术方向的研究。
猜你喜欢
Journal of Palaeogeography(2022年1期)2022-03-25 04:17:00
快乐语文(2021年35期)2022-01-18 06:05:30
法律方法(2019年4期)2019-11-16 01:07:28
摄影之友(影像视觉)(2017年1期)2017-07-18 11:12:16
北京汽车(2016年6期)2016-10-13 17:07:50
西南交通大学学报(2016年3期)2016-06-15 20:29:35
电子制作(2016年21期)2016-05-17 03:53:01
通信电源技术(2016年5期)2016-03-22 01:09:57
现代制造技术与装备(2015年4期)2015-12-23 10:20:18
电源技术(2015年11期)2015-08-22 08:50:38