基于PLC的航天器地面测控系统通用化设计研究
2016-10-28 03:13吴美金王秉臣卢逸斌
计算机测量与控制 2016年7期
吴美金,王秉臣,卢逸斌,邵 琼,谈 寅
(上海宇航系统工程研究所,上海 201109)
基于PLC的航天器地面测控系统通用化设计研究
吴美金,王秉臣,卢逸斌,邵 琼,谈 寅
(上海宇航系统工程研究所,上海 201109)
航天器地面有线前端测量控制系统是航天器开展整器测试的支持设备;为解决该系统在多个航天器测试中存在重复设计、通用性差的问题,为提高系统的质量和可靠性、降低研制风险、节约研制经费,在基于PLC的航天器地面测控系统工作原理的基础上,对系统研制开展通用化设计研究;通过硬件模块化、组件选型统一化、接口设计标准化、软件功能层次化和可配置化,提高了设备的通用性和互换性;研制的测控系统在多个航天器型号间得到了延用和重用,取得了较好的效果。
航天器;地面测试系统;PLC;通用化
0 引言
航天器在总装和环境试验期间以及在发射前,需要对器上的各项电性能进行测试。航天器地面有线前端测量控制系统(以下简称“地面测控系统”)是航天器开展整器测试的支持设备,主要实现航天器的有线状态控制和有线参数测量。
地面测控系统扮演了整器加电测试前的辅助、测试过程中关键状态控制、重要信号测量的角色,几乎在每个航天器型号地面测试中均需使用。随着航天器型号的增多和复杂程度的提高,地面测控系统的造价也很可观。而不同型号的地面测控系统在功能上大同小异,为每个型号研制一套地面测控系统的做法显然是不经济的[1]。研究地面测控系统的通用化设计,在减少重复劳动,节约经费,缩短研制周期,降低研制风险,提高产品质量和可靠性方面具有重要意义。
可编程控制器(PLC)是以微处理器为基础,综合计算机技术、自动化技术和通讯技术而发展起来的一种新型工业控制装置。它将传统的继电器控制技术和现代计算机信息处理两者的优点结合起来,成为工业自动化领域中最重要、应用最多的控制设备[2]。目前,构建自动测量控制系统的主流方案大部分采用基于PLC或PXI总线的平台实现。相比较基于“PXI总线机箱+控制器+测量控制单元”构建的测控系统,采用基于PLC实现的测控系统具有可靠性高(西门子、三菱、AB的PLC产品平均无故障时间均达到了20万小时以上)、编程简单、通用性强的优点[3]。为此,本文对基于PLC的航天器地面测控系统设计开展研究,阐述了系统实现的工作原理与通用化设计的方案。
1 系统概述
1.1 功能与组成
地面测控系统的具体功能主要包括:器上母线电压、母线电流、重要单机加电状态、开关通断状态的测量;地面供电电源参数的测量;器上有线控制指令输出、射前电脱插脱落控制;地面供电电源输出通断控制等。
依据功能需求,硬件设计以单元模块化、接口标准化、兼具可扩展性为设计原则,将专用的接口单元模块独立研制,以实现最大程度的通用性。典型的硬件系统组成框图如图 1所示,主要由前端调理机、PLC、程控电源、以太网交换机、控制计算机等组成。前端调理机为专用模块,其他模块均为通用模块。

图1 地面测控系统组成图
前端调理机是系统的唯一对外模块,用于实现器地信号的转接、归类、匹配、隔离及驱动。它将输入输出信号分为控制信息、状态信息及模拟量信息[4]。前端调理机一方面接收PLC的控制指令,通过继电器电路,实现指令的驱动输出。另一方面,将器上和地面供电电源的模拟量信号隔离分压后送PLC采集、处理,开关量信号直接送PLC采集处理。
PLC一方面通过以太网接收控制计算机的控制命令,根据内部逻辑程序,控制PLC内各I/O模块工作;另一方面将采集到的状态参数信息组帧打包后送计算机显示、存储。程控电源负责为器上继电器线包或前端调理机供电。
1.2 工作原理
典型的基于PLC的测量控制系统硬件设计原理如图 2所示,其中,PLC主要由电源模块、CPU模块、I/O模块(包括继电器输出模块、晶体管输出模块、模拟量输入模块、数字量输入模块)组成。电源模块作为系统电源,给CPU模块和I/O接口模块背板供电。CPU模块完成PLC程序存储、数据计算与处理、通信交互等功能。I/O模块完成信号的测量与控制。
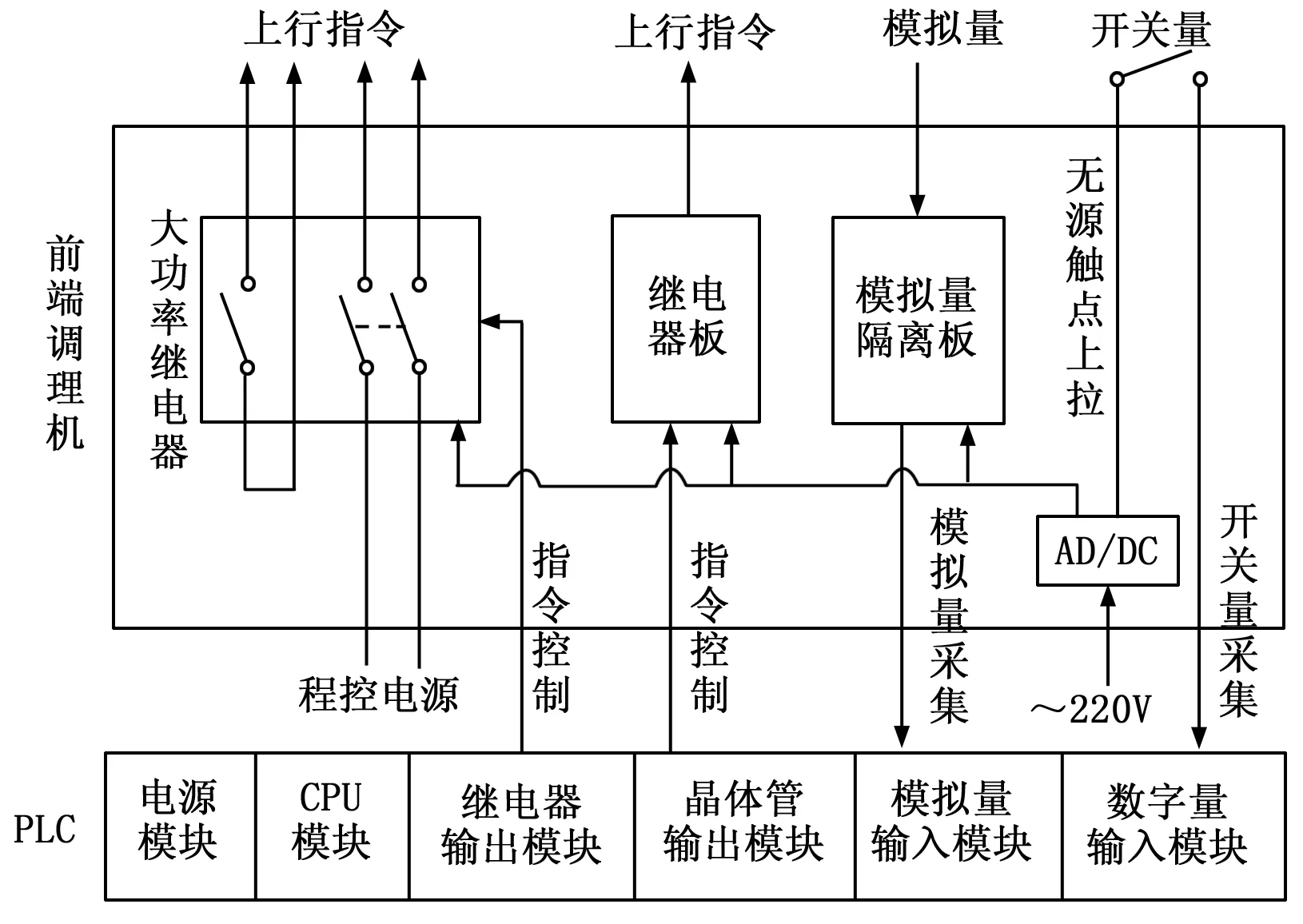
图2 硬件设计原理图
1.2.1 输出控制原理
对驱动负载较小(通常小于1A)的应用采用“晶体管输出模块+继电器板”输出控制,对驱动负载较大(通常不小于3A)的应用采用“继电器输出模块+大功率继电器”输出控制。晶体管输出模块和继电器输出模块可依据实际驱动负载电流大小选用相应模块。
晶体管输出模块与前端调理机中的继电器接口如图 3所示,PLC通过晶体管输出模块集电极开路门(OC门)输出,该接口上拉到继电器的线包,通过晶体管的开关,控制继电器线包通断电,从而驱动继电器触点动作,实现动合触点信号的输出。通过设置PLC内计时器,可控制晶体管开关时间,从而实现继电器触点闭合时间的控制。继电器板的引入是为了提高输出动合触点的集成度,单块继电器板集成不少于16个继电器。继电器输出模块与大功率继电器接口控制原理与之类似。

图3 开关量输出控制接口图
1.2.2 模拟量测量原理
外部模拟量通过模拟隔离板分压、隔离后,输入至PLC模拟量输入采集模块。模拟隔离板采用分压电路和基于变压器耦合的隔离芯片AD202实现。图 4是模拟隔离板单个通道的原理图,其中,IN1+、IN1-为模拟量输入的正负线;R1、R7将输入模拟量分压到标准的0~10 V(可根据实际输入电压采用相应的电阻)。模拟隔离板实现了器地模拟量采集的隔离和模拟量通道间的彼此隔离。
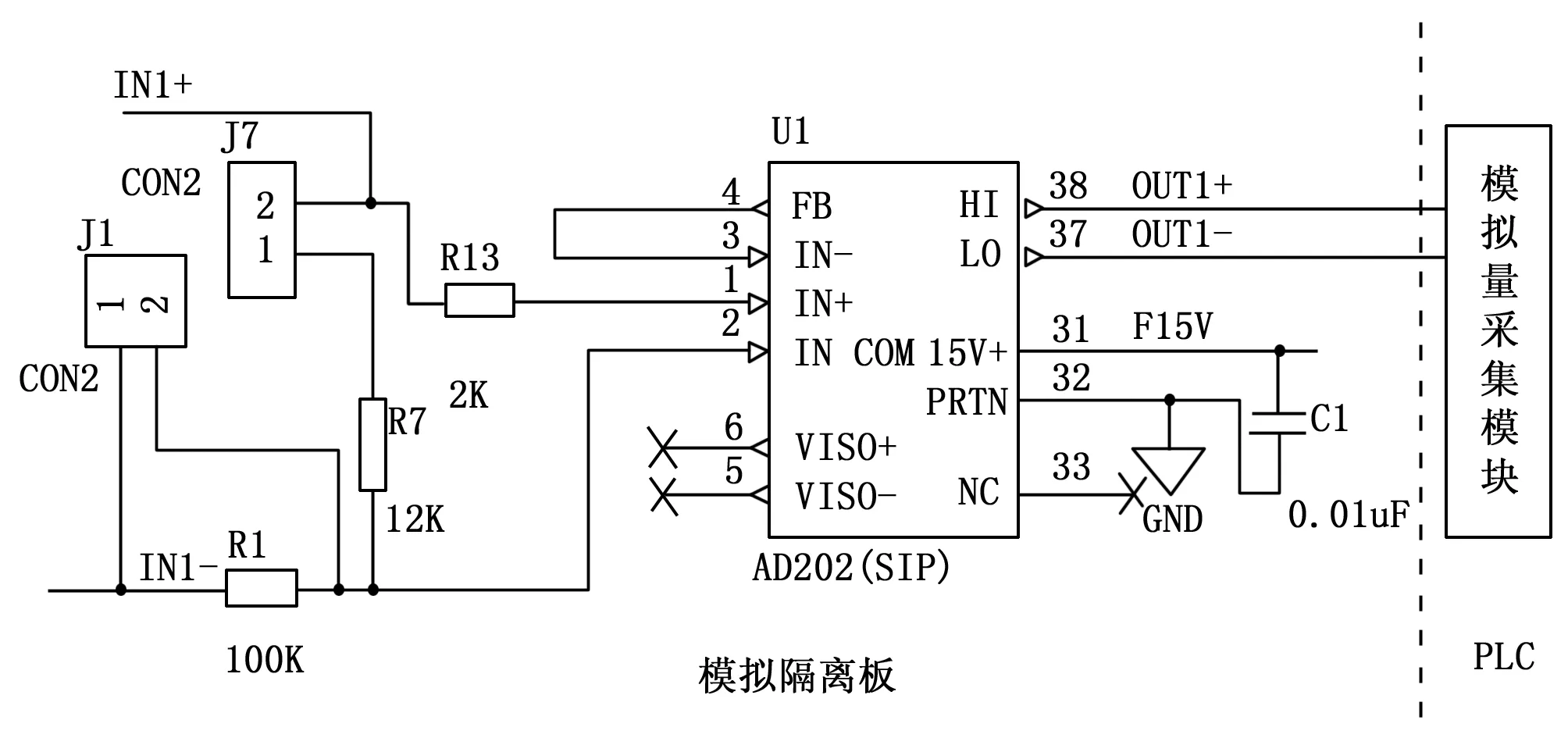
图4 模拟量测量接口图
1.2.3 开关量测量原理
对外部待测开关量的动合触点一端上拉至24 V,另一端输入到PLC的数字量输入模块,测量接口如图 5所示。当外部开关量触点闭合时,PLC数字量输入模块输入24 V,接收到状态信号。开关量测量通过光耦隔离电路实现器地的隔离采集。

图5 开关量测量接口图
1.3 PLC冗余方式
航天工程对可靠性要求高,因该系统直接用于航天器临射前测试,在基于某些类型故障发生概率很小或几乎不可能发生的前提下,为实现对一些关键信号加以控制和状态的监控[5],PLC往往采用冗余设计。冗余方式的选择直接影响到系统设计,因此确定PLC冗余方式是实现通用性的前提。
PLC冗余方式主要有“硬冗余”和“软冗余”两种架构(图6)。硬冗余是将PLC内的电源、CPU模块、底板总线等独立为主备份两套子系统,是一套全方位的热冗余架构。PLC主份系统与备份系统的信息交互通过CPU模块上的光纤数据线以及同步模块来完成。单个子系统故障失效时,可自动、快速、无扰动地切换到另一个子系统,继续从断点处执行用户编写的逻辑控制程序。切换工作依靠集成的PLC产品自主实现,不需外围控制。西门子的S7-400PLC、AB公司1756系列的部分PLC型号,均是硬冗余架构。硬冗余架构的优点是故障切换时间短、可靠性高,缺点是成本高。

图6 PLC冗余方式
软冗余是仅将PLC内的CPU模块冗余,两个CPU上均运行相同的PLC软件。软件运行过程中相互通信,当单个CPU出现故障时,依靠PLC内的故障诊断程序自主切换至另一CPU继续工作。软冗余故障切换时间较硬冗余长,但成本低,适合规模较小的应用场合。
2 通用化设计
2.1 硬件层面
对于不同系列的航天器,器上信号设计原理和信号接口的差异性使得前端调理机通常需要专门设计。对于同一系列的不同航天器型号,通过规范和统一器上接口标准,同时在前端调理机的测量控制路数上采取最大包络设计,并保持一定的可扩展性,可以实现前端调理机的通用。
PLC采用模块式结构,采取“搭积木”的方式组成系统,它由机箱和各模块组成。模块选用商业化产品,选择空间大,如AB公司1756系列ControlLogix PLC机架,它具有4~17个插槽的多种机架可供用户选择。PLC内的任意模块(电源模块、控制模块、I/O模块、通信模块等)可插在任意插槽中。设计时机架选型上可预留一定数量的I/O模块插槽,后续只需改动PLC软件和控制计算机软件就能实现功能的扩展。
系统内部各个模块除前端调理机外,均采用标准的EtherNet/IP、ControlNet等网络通讯。前端调理机与PLC之间、前端调理机与航天器之间的连接按信号类型归一为若干规格的电接口(如J14A、J36A、Y27系列电连接器),实现同一套PLC与不同前端调理机、同一套前端调理机与不同航天器的连接。
2.2 软件层面
控制计算机软件实现的功能主要包括:向PLC软件发送开关型指令或脉冲型指令;向程控电源发送电源参数设置与功率输出控制命令;接收PLC软件回传的采集数据帧,完成电压、电流、开关通断状态等数据的处理、显示及存储;安全报警功能等。
软件的通用化设计主要是通过对地面测控系统的功能、性能和工作流程进行分析,提取共性的、确定的和不变化的因素,按照层次化、模块化和通用化的思想,构建通用化测控软件平台框架。依据软件内部各部分功能,将软件结构分为测试处理层和配置服务层两个基本层次,软件平台框架如图 7所示。

图7 上位机控制软件架构框图
测试处理层按照指令控制、数据采集、数据显示和数据存储功能进行子模块编程,以减少了后期更改的工作量,提高软件子模块对不同型号应用的适用性。对于需要专用化的部分,采取可配置化设计思路,采用更改参数配置文件的方式实现软件升级或重构,实现系统软件在同类型号和不同类型号之间的延用或重用[6-7]。
参数配置文件的一个实例如表1所示。常用的可配置项包括:参数代号和名称、采集参数的类型(0:模拟量、1:开关量)、模拟量处理变换公式;输出指令代号和名称、输出指令类型(阶跃、脉冲)、脉冲指令宽度、电源通信所使用的地址等。采用参数可配置化方案减少了软件更改的工作量,提高了对不同航天器型号的适用性。

表1 地测参数配置文件示意图
3 试验结果与分析
结合现有型号特点,系统实现采用PLC硬冗余架构,整套系统集成在19英寸宽、1.6 m高的机柜中。机柜内PLC选用AB公司的1756ControlLogix系列标准机架(支持最大10个插槽模块同时工作)。为减少PLC与前端调理机之间的硬线接口,进一步提高PLC机箱的通用性,将I/O模块集成在前端调理机中,使得PLC与前端调理机通信仅需采用标准的TCP/IP、ControlNet 1756-CN网络通信接口。程控电源统一选用Agilent 5768A程控可编程电源(开路电压80 V,最大输出电流19 A)。前端调理机对外接口主要采用Y27系列电连接器。
总的来说,设计的系统主要通过以下方面提高了通用性:
1)通过将PLC内的I/O模块改装到前端调理机中,PLC机箱内劲安装控制器、电源及通信模块,简化了PLC与前端调理机的接口,实现了PLC机箱的对多个航天器的完全通用;
2)前端调理机通过预留一定测量控制路数并归一化对外接口,实现了通过适应性修改就能满足不同航天器测试的需要;
3)控制软件采用统一的Win7操作系统平台和Visual Studio C#开发环境,通过软件层次化、模块化和可配置化,减少了软件为适应不同型号测试进行更改的工作量。
4 结论
本文对基于PLC的航天器地面测控系统设计和工作原理进行了介绍,给出了提高系统通用性的实施路径。测控系统通用化设计与研制打破了以往每个型号配置一套设备的格局,经过探索和尝试不断提高了系统的可适用化程度,通过软硬件两个层面的通用化设计提高了产品质量和可靠性,减少了重复设计,缩短了研制周期,同时降低了开发成本。研制成果在深空探月、实践系列、载人航天等多个航天器型号得到了不同程度的延用和重用,后续需进一步规范和统一器地测控信号接口来提高系统的通用性。
[1] 王庆成.航天器电测技术[M].(第1版).北京:中国科学技术出版社,2007.
[2] 沈 军.基于PLC的风量测量控制系统设计[D].上海:上海交通大学,2007.
[3] 胡 涛,苏建良,石剑锋.PLC技术与应用及其发展分析[J].机床与液压,2005,12(3):135-137.
[4] 李 立.航天器地面供配电设备接口设计技术[J].计算机测量与控制,2013,11(6):447-450.
[5] 宋征宇,刘亮亮.基于硬解题的PLC设计及其在测发控系统中的应用[J].航天控制,2012,30(5):78-82.
[6] 张洪光.航天器供配电测试设备硬件模块化、软件配置化设计思路[J].航天器工程,2010, 19(1):72-76.
[7] 赵吉明,任 亮,杨 枫.基于配置文件的航天器供配电测试软件一体化设计方法[J].计算机测量与控制,2014,22(7):2316-2320.
Generalized Design of Spacecraft Ground Test and Control System Based on PLC
Wu Meijin, Wang Bingchen, Lu Yibin, Shao Qiong, Tan Yin
(Shanghai Institute of Aerospace System Engineering, Shanghai 201109, China)
Spacecraft ground cable front-end measurement and control system is a support device for spacecraft test. In order to solve the problem of repeated design and poor commonality in the testing of multiple spacecraft models, in order to improve product quality and reliability, reduce development risk, save research funds of the system, on the basis of the system based on PLC, it is essential to carry out the research of generalized design. Through hardware modular unification, component selection, interface design standardization, software functionality and configurable hierarchical, the versatility and interoperability of equipment are improved. The system has been widely used and reused in multiple spacecraft models, and achieved good results.
spacecraft; ground test system; PLC; generalized
2016-01-27;
2016-02-24。
吴美金(1985-),男,江西上饶人,硕士研究生,工程师,主要从事航天器自动化测试方向的研究。
1671-4598(2016)07-0014-03
10.16526/j.cnki.11-4762/tp.2016.07.004
TN702
A
猜你喜欢
国际太空(2022年7期)2022-08-16
国际太空(2019年9期)2019-10-23
国际太空(2018年12期)2019-01-28
测控技术(2018年2期)2018-12-09
测控技术(2018年12期)2018-11-25
国际太空(2018年9期)2018-10-18
山东工业技术(2016年15期)2016-12-01
太空探索(2016年12期)2016-07-18
电子制作(2016年21期)2016-05-17
电测与仪表(2015年11期)2015-04-09