
基于AT89C52的风摆控制系统设计与实现
2016-10-25 06:24尚坡利吴宁
甘肃科技纵横 2016年9期
尚坡利,吴宁
基于AT89C52的风摆控制系统设计与实现
尚坡利1,吴宁2
(1.兰州石化职业技术学院电子电气工程系,甘肃兰州730060;2.兰州工业学院电气工程学院,甘肃兰州730050)
介绍了一种基于AT89C52单片机为控制核心的风摆控制系统,该系统通过调节直流风扇转速实现对摆杆摆角的实时测量、显示和控制。系统采用SCA100T-D02角度传感器来实现对摆杆转角信号的采集,根据转角值输出一定占空比的PWM脉冲波,用L298N作为驱动电路控制风扇电机转速,以达到控制摆杆转角的目的,同时在径向距离大于50cm时可用蜂鸣器报警。该系统经过测试实验,能耗低,性价比高,具有较高的实际应用价值。
检测技术与自动化装置;风摆;AT89C52
0 引言
2015年全国大学生电子设计竞赛本科组B题以风力摆控制系统为研究对象,要求所设计系统在规定时间内能够做出重复自由摆运动,或是可根据要求设定摆动方向,摆动时所附加激光笔能够画出直线段;或是将风力摆拉起一定角度放开,规定时间内使风力摆制动达到静止状态。本论述基于该竞赛题目提出的设计要求,给出一种简单实用、性价比高,且易于实现的设计方案。
1 总体方案设计
根据题目的要求,本系统需解决以下问题:对风扇电机的转速进行快速而准确的控制,以保证风扇的转角短时间稳定在控制范围内;为保证系统的精度要求,必须要对摆杆摆动角度进行实时检测及显示;为保证摆杆达到预定角度还需要相应的设定电路。根据以上要求,其控制模型框图见图1所示。
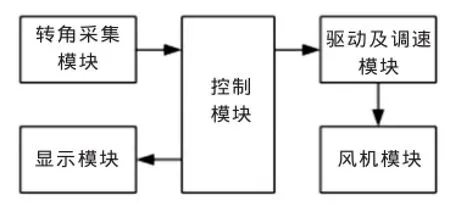
图1 控制系统模型框图
2 系统设计
为完成系统控制目标,对各环节模块进行如下设计。
2.1控制模块设计
根据题目要求,控制器主要用于传感器信号的接收与辨认、控制电机转动、显示实时角度等。有以下两种方案:
方案一:采用FPGA作为系统控制器。FPGA可以实现各种复杂的逻辑功能,规模大、密度高、体积小、稳定性高,并且可应用EDA软件仿真、调试,易于进行功能扩展。但由于其集成度高,使其成本偏高,同时由于芯片的引脚较多,实物硬件电路板布线复杂,加重了电路设计和实际焊接的工作[1]。
方案二:采用AT89C52作为系统控制器[2]。单片机AT89C52是一种带8K字节内嵌可编程闪存的低功耗高性能的八位微控制器,双数据指针,具有3个16位定时/计数器,6个两级中断源结构,以及掉电模式下的自动保存功能,软件编程灵活、自由度大,可用软件编程实现各种算法和逻辑控制,可以达到本系统的要求[3]。
基于以上分析,选择方案二。
2.2转角采集模块设计
方案一:采用MMA7455L芯片。其为XYZ三轴微机电加速度计,可测量三轴方向上工作参数,输出为8位或10位的数字量,可直接与单片机连接。硬件电路简单,但成本较高,软件程序调试较困难[4]。
方案二:采用SCA100T-D02。SCA100T-D02测量范围为-90°~+90°,具有模拟和数字两路输出。模拟量输出电压为0~5V,不需信号调理电路就可送入A/D,可采用模拟量输出,后接AD0809。此方案硬件电路简单,软件调试简单,测量数据稳定[5-6]。
基于以上分析,选择方案二。
2.3驱动及调速模块设计
方案一:采用线性放大驱动方式。单片机输出数字量,经D/A后转换为连续变化的电压值,经功率驱动后加在直流风扇电机上。此方式波动小,线性好,对邻近电路干扰小,但存在效率低和散热等问题。硬件需要D/ A转换器,电路复杂,成本高。
方案二:采用PWM调速。PWM调速是使加在直流电机两端的电压为方波形式,通过改变方波占空比实现对电机转速调节,PWM由单片机输出。采用L298N作为驱动芯片,其内部开关为电子开关,速度很快,稳定性也极强。此方案电路简单,使用比较方便。
基于以上分析,选择方案二。其电路原理图见图2所示:
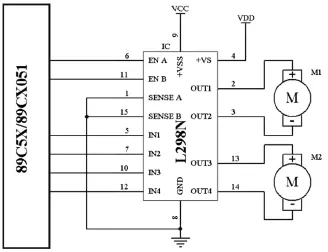
图2 L298N电机驱动原理图
2.4显示模块设计
方案一:使用传统的数码管显示。数码管具有低功耗、低损耗、低压、寿命长、耐老化、防晒、防潮、防火、防高(低)温,对外界环境要求低,易于维护,操作简单等特点。数码管采用BCD编码显示数字,程序编译容易,资源占用较少;但是其不适合显示字符,且电路复杂。
方案二:使用12864液晶显示屏显示。12864液晶显示屏(LCD)具有轻薄短小、低耗电量、无辐射危险,平面直角显示以及影像稳定不闪烁等优势,可视面积大,画面效果好,分辨率高,抗干扰能力强等特点[7]。
基于以上分析,选择方案二。
2.5风机模块设计
方案一:交流风机使用方便,常用于工业控制,但运动精度低,难以实现精确的位置控制。如用交流电机控制风板转动,将难以控制其精确位置,系统稳定性差,较难达到题目的要求。
方案二:直流电机的运动精度很高,可实现较为精确的运动,由其组成的位置控制系统定位准确,稳定时间短,一般可采用开环控制。直流电机的控制系统必须与其驱动控制器匹配使用,控制起来也十分方便。
基于以上分析,选择方案二。
根据上述分析,设计出系统硬件方案,由SCA100T-D02采集转角信息后送入ADC0809转换,输出的8位数字量送入AT89C52中,单片机经分析处理后输出一定占空比的PWM,经L298N功率驱动放大后控制电机转速,同时可用按键设定摆杆转角并显示[8]。
2.6程序流程图
根据系统控制要求,可设计主流程见图3所示:

图3 系统主流程图
3 测试结果分析
通过测试结果得出,当帆板角度从0°~60°范围变化时,当角度小于20°时,控制较易,误差较小;当角度接近60°时,控制时间明显增加,精度存在一定误差。当控制角度在30°~50°时,误差小,控制时间短,调节参数符合标准要求。本设计方案可基本满足设计要求,下一步可通过改进硬件及软件设计方案达到更高控制目标。
[1]吴厚航.深入浅出玩转FPGA[M].北京:北京航空航天大学出版社,2013.
[2]凌志浩.AT89C52单片机原理与接口技术[M].北京:高等教育出版社,2011.
[3]黄智伟.全国大学生电子设计竞赛训练教程[M].北京:电子工业出版社,2010.
[4]谷云高,石彦君,周晓静,等.基于MMA7455的机器人姿态控制系统的研究[J].制造业自动化,2010,32(08):15-17.
[5]孙汝建.基于SPI接口的双轴SCA100T倾角传感器及其应用方法[J].仪器仪表用户,2006,13(4):69-71.
[6]王盛军,邵琼玲.基于SCA100T和MCU数字倾角传感器的设计与实现[J].微计算机信息,2010,26(22):90-91.
[7]张新强.点阵LCD驱动显控原理与实践[M].北京:北京航空航天大学出版社,2010.
[8]朱清.基于单片机控制的人机界面应用研究[J].工业控制计算机,2009,22(12):5+7.
TP273;TP368.1
A
10.3969/j.issn.1672-6375.2016.09.012
2016-7-10
尚坡利(1984-),女,汉族,河南汝州人,研究生,助教,主要研究方向:电力系统及其自动化、智能电网、智能控制。
猜你喜欢
作文小学高年级(2022年3期)2022-04-20
中学生数理化·七年级数学人教版(2021年9期)2021-11-20
电子制作(2019年13期)2020-01-14
模具制造(2019年10期)2020-01-06
电子制作(2019年15期)2019-08-27
电子制作(2019年11期)2019-07-04
电子制作(2019年9期)2019-05-30
福建中学数学(2018年1期)2018-11-29
37°女人(2017年8期)2017-08-12
解放军健康(2017年5期)2017-08-01
