20E型双流制电力机车电气牵引及控制系统
2016-10-25 07:55高首聪梁兴元
铁道机车车辆 2016年1期
李 鹏, 高首聪, 梁兴元
(株洲南车时代电气股份有限公司 技术中心, 湖南株洲 412001)
20E型双流制电力机车电气牵引及控制系统
李鹏, 高首聪, 梁兴元
(株洲南车时代电气股份有限公司技术中心, 湖南株洲 412001)
20E型电力机车是一种双流制交流传动电力机车,适用于AC 25 kV/50 Hz和DC 3 000 V两种供电制式。根据不同的供电制式,机车能够在持续运行的情况下实现主电路转换。本文主要介绍了20E型机车电气牵引系统的网侧高压电路和牵引变流系统设计原理、机车控制系统功能,并分析了设计关键要素和技术特点。
交流传动电力机车; 双流制; 多流制; 电气牵引系统; 控制系统
世界上许多国家的铁路系统由于历史原因存在多种供电制式。干线铁路中,早期多采用低压直流供电,近50年则采用高压交流供电;城市轨道交通中,一般采用低压直流供电。因此,在许多国家或地区面临着不同程度跨供电制式运输的问题。目前主要供电制式有以下4种:AC 15 kV/16.7 Hz、AC 25 kV/50 Hz、DC 1 500 V和DC 3 000 V[1]。
20E型电力机车是中国中车出口到南非的双流制窄轨电力机车。与国内广泛应用的交流传动电力机车相比,20E机车具有能够工作在AC 25 kV和DC 3000 V两种供电制式下的功能,同时还具备低恒速控制、8台机车重联、内电混编重联、无线数据传输等功能。本文主要介绍20E型双流制电力机车电气牵引及控制系统。
1 机车主要技术参数
供电制式25 kV/50 Hz,工作电压波动范围17~31 kV DC 3 000 V,工作电压波动范围2 000~4 000 V
轴式B0-B0
轴重21.5±0.5 t
轨距1 067 mm
轮径(半磨耗)1 180 mm
轮周持续功率
(牵引和再生制动)3 000 kW
辅助电源3 AC 380 V/50 Hz
最大运营速度100 km/h
最大试验速度110 km/h
持续速度40 km/h
起动牵引力320 kN
持续牵引力270 kN
最大电制动力再生制动: 200 kN
电阻制动: 200 kN
20E型机车在交流供电制式和直流供电制式下采用统一的牵引、电制动特性设计,并具有较宽的恒功区间。机车特别采用高精度速度采样和牵引力输出控制。在进行列车装载时,通过低恒速控制模式能在速度范围为0.2~3 km/h内恒速运行,分级调整幅度为0.02 km/h,速度波动不大于设定速度的10%。图1为机车牵引、电制动特性曲线。

图1 20E型双流制电力机车牵引/电制动特性曲线
20E型机车在交流供电制式和直流供电制式下具有不同的功率发挥特性曲线。在网压允许波动范围内,辅助系统功率不被限制。
在25 kV/50 Hz供电制式下,当网压在22.5~29 kV范围内,轮周功率为3 000 kW;当网压从22.5 kV下降到19 kV,轮周功率线性下降至2 520 kW(额定功率的84%);当网压从19 kV下降到17 kV,轮周功率线性下降为0;低于17 kV 欠压保护。当网压从29 kV上升到31 kV,轮周功率线性下降为0,超过31 kV过压保护,见图2所示。
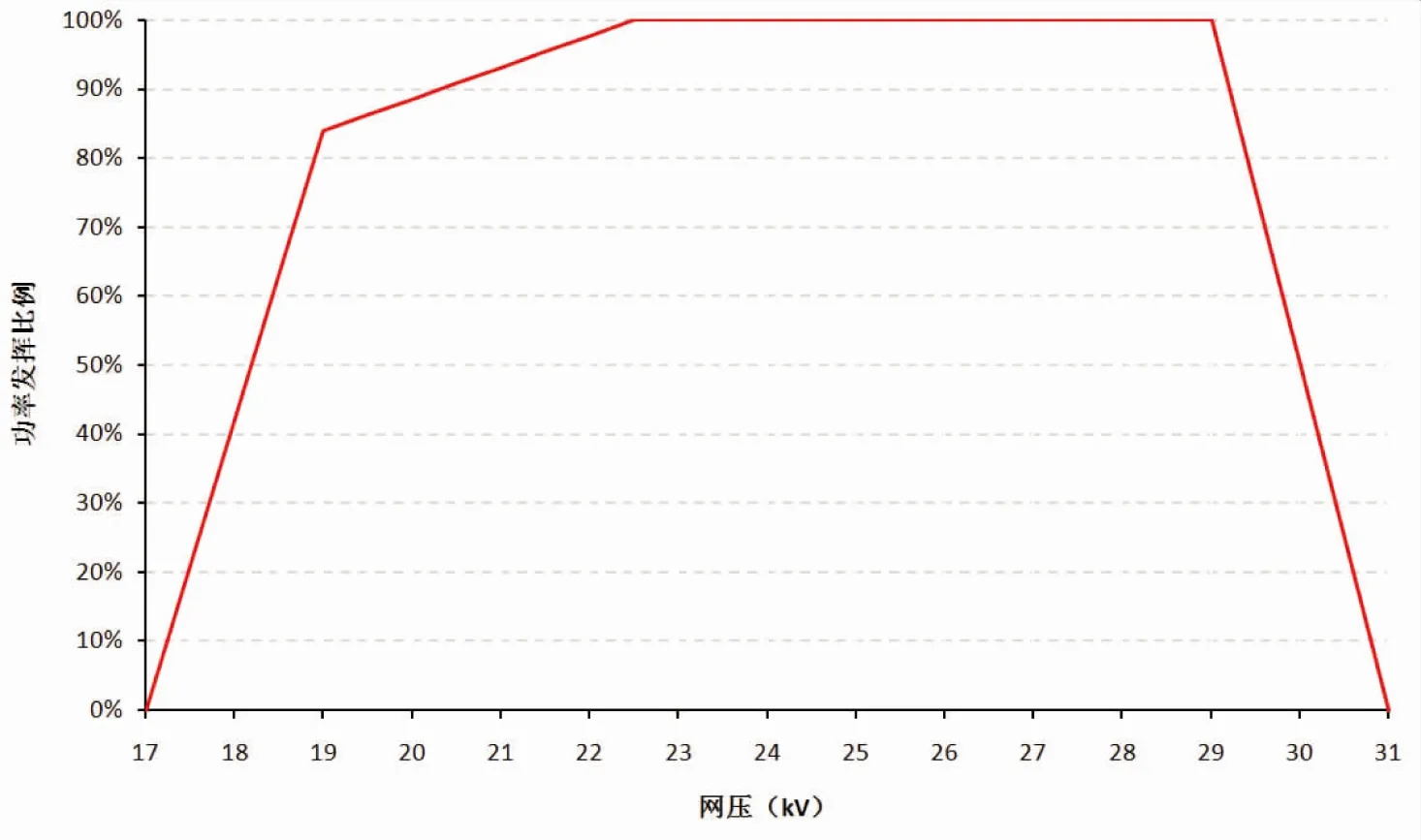
图2 交流供电制式功率特性曲线
在DC 3 000 V供电制式下,当网压在2.8 ~3.9 kV范围内,轮周功率为3 000 kW;当网压从2.8 kV下降到2 kV,轮周功率线性下降至0;低于2 kV 欠压保护。当网压从3.9 kV上升到4 kV,轮周功率线性下降为0,超过4 kV过压保护。见图3所示。
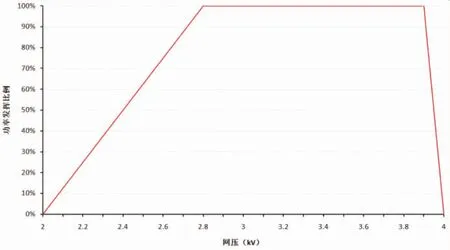
图3 直流供电制式功率特性曲线
2 牵引电气系统
牵引电气系统由网侧高压电路(见图4)和牵引变流系统电路(见图9)两部分组成。网侧高压电路完成供电制式选择和受流,牵引变流系统电路完成电能转换。

图4 高压网侧电路
2.1网侧高压电路
对应不同的供电制式,机车具备交流供电和直流供电两种电路配置模式。当工作在交流供电模式时,AC/DC选择隔离开关(QS2)处于分断位置,交流主断路器(QF1)闭合,牵引变压器作为供电网压变换装置使用;当机车工作在直流供电模式时,AC/DC选择隔离开关(QS2)处于闭合位置,交流主断路器(QF1)分断,直流主断路器(QF2)闭合,牵引变压器的次边绕组作为直流滤波电抗器使用。欧洲PRIMA3U15型、BR189型和Rh1216系列机车上有类似的设计,因牵引变流系统电路不同,略有差异[2-4]。
2.2直流滤波电路
在直流供电模式下,机车会重新配置主电路。主电路含有直流滤波电抗器,由图9中的LS和牵引变压器次边绕组组成。直流滤波电感的选取主要考虑以下几个因素:
(1) 主电路短路故障时的短路电流抑制能力;
(2) 运行过程中可能产生的过电压;
(3) 与主电路中电容器的匹配;
(4) 实际线路的阻抗参数以及其他特殊要求;
(5) 电抗器自重、体积等因素。
根据变电所参数,供电电源等效电感L0=0.9 mH、电阻R0=0.11 Ω,当机车处于靠近供电站的位置时,不考虑电网线路阻抗。系统等效电路见图5,RL1、RL2是机车线路和设备等效电阻,LS、LTr是滤波电抗器,Cd是机车牵引变流器支撑电容。

Ud-牵引变流器直流回路电压;U0-机车输入侧直流网压;Iin-机车输入电流
图5直流滤波电路仿真电路
2.2.1直流滤波电感与短路电流的关系
当供电网压为DC 3 000 V,直流滤波电感分别为6,26 mH,牵引变流器满载运行时,仿真计算直流回路短路的情况。仿真波形见图6,短路发生后30 ms内,Iin电流上升率分别约为295,88 A/ms。
由仿真结果可知,当机车主电路出现短路故障时,直流滤波电感值越大,短路电流上升率越低。通过等效电路仿真可以计算出系统最长响应时间,这给各高压电器部件的选型和保护参数设定提供了依据。
假设短路电流上升率为100 A/ms,短路电流达到3 000~4 000 A时必须分断直流主断路器,那么在20~30 ms内必须完成过流检测和断路器分断动作。这就需要设定合理的保护门槛值以及设计合理的硬线控制环路。在要求更高的场合,还需设计快速分断装置,使得直流主断路器控制线圈迅速失电,加速分断过程。
2.2.2直流滤波电感与过电压的关系
当供电网压为DC 3 000 V,直流滤波电感分别为6,26 mH,牵引变流器满载运行时,仿真计算牵引变流器突然封锁脉冲的情况。仿真波形见图7,在短时间内,Ud中间电压分别上升至3 798 ,4 407 V左右。
由仿真结果可知,当机车牵引变流器在牵引工况下突然封锁脉冲时,中间电压会被迅速抬高并可能超过牵引变流器允许的工作电压。特别是直流电网的工作电压上限值达到3.9~4 kV,这种工况下,过电压情况会变得更加恶劣。因此,即便主电路中存在过压保护装置,由于装置检测、开启的过程有一定延时,所以直流滤波电感值也不宜选取得过大。
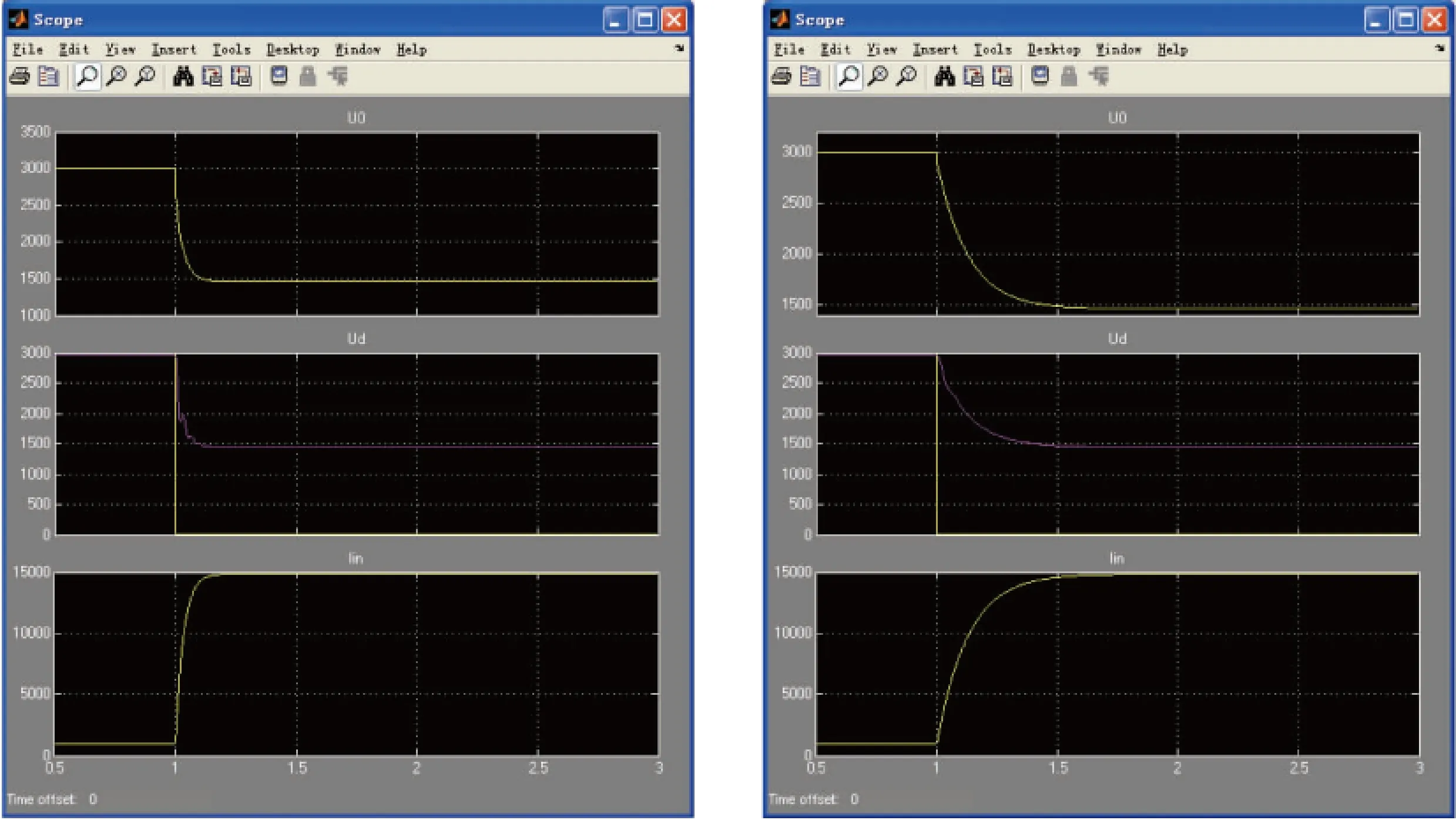
图6 直流回路短路电流的仿真波形
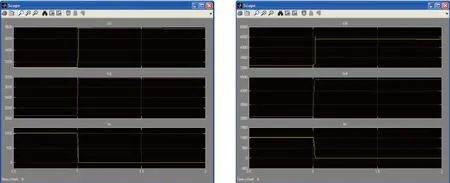
图7 牵引变流器封脉冲时引起的中间电压突变
2.2.3机车等效阻抗的计算
南非既有运营线路的供电回路中可能出现50 Hz交流分量,并对信号系统产生一定干扰,因此对机车在该频率下的阻抗有一定要求。在设计时,可根据线路实际条件、机车编组情况等予以综合考虑。机车直流模式50 Hz交流分量通路等效简化电路见图8。
综上所述,过小的滤波电感会导致短路电流上升过快,给系统保护带来威胁;过大的滤波电感会导致严重过电压产生,并增加设备质量、成本,在许多空间受限的场合,大大提高设计难度。除此之外,还可能涉及到抑制线路信号干扰等特殊要求,因此滤波电抗器的取值选型是一个综合考虑、反复论证的结果。
单架主电路对应50 Hz交流分量阻抗:
整台机车主电路对应50 Hz交流分量阻抗:
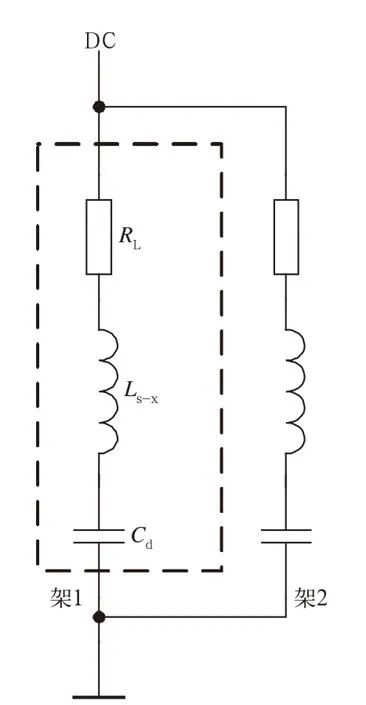
图8 直流模式50 Hz交流分量通路等效电路
2.3牵引变流系统
机车牵引变流系统主要由1台牵引变压器、2台牵引变流器及4台异步牵引电动机构成。每台牵引变流器设置二重四象限整流器,对应牵引变压器2个次边绕组(每台牵引变压器有4个次边绕组),2组逆变器对应2台异步牵引电机以实现轴控。其中一重和二重中间直流回路并联,中间直流回路的二次谐振电容器与设置在牵引变压器内的一个二次谐振电抗器串联形成二次谐振电路。
当机车运行在交流供电区,在牵引工况下,网侧电压由受电弓经交流主断路器进入牵引变压器原边绕组,降压后通过次边绕组输出,进入牵引变流器进行交—直—交变换,最终驱动异步电机。在制动工况下,异步电机工作在发电机工况生成的电能经牵引变压器反馈回电网。

图9 电传动系统主电路图
当机车运行在直流供电区,在牵引工况下,机车AC/DC选择隔离开关(QS2)闭合,牵引变流器交直流转换隔离开关QS1.1、QS1.3、QS1.6分断,QS1.2、QS1.4、QS1.5闭合。网侧电压由受电弓经直流主断路器,再经滤波电抗器进入直流回路。直流电压经过逆变器进行直—交变换,最终驱动异步电机。在制动工况下,异步电机工作在发电机工况生成的电能反馈回电网或经制动电阻消耗。
牵引变流器采用主辅一体化设计。牵引变流器内部一重与二重直流回路并联为1台辅助变流器供电。辅助电源系统采用冗余设计,在正常情况下,能够分别向辅助系统提供VVVF和CVCF电源。当一台辅助变流器故障时,另一台辅助变流器能维持机车辅助系统供电,此时辅助变流器工作在CVCF方式。
主要电气设备及参数:
(1) 牵引变压器
原边绕组额定电压25 kV
原边绕组额定电流150.5 A
牵引绕组额定电压4×1 650 V
牵引绕组额定电流(AC)4×570 A
牵引绕组额定电流(DC)650 A
短路阻抗电压38%(-5%~+10%)
谐振电抗器2×0.5 mH(±10%)
(2) 牵引变流器
中间直流电压DC 3 000 V
支撑电容4 mF
二次电容5 mF
制动电阻10.2 Ω
(3) 辅助逆变器
额定容量 160 kVA
开关频率750 Hz
输出电压/频率三相380 V/50 Hz (降压滤波后)
(4) 牵引电机
额定功率 775 kW
额定电压(基波)1 720 V
最大电压(基波)2 340 V
额定电流(基波)335 A
起动电流(基波)415 A
3 机车控制系统
3.1控制系统构成
微机网络控制系统TCMS分为绞线式列车总线WTB和多功能车辆总线MVB两级控制,包含多个IO、控制模块,采用分布采集与执行,集中控制与管理的模式。以太网Ethernet用于信息化设备之间的数据传输。系统拓扑结构见图10所示。

RJ45-以太网连接器;TCU-牵引控制单元;DDU-智能显示单元;GWMe-网关控制模块;DXMe-数字输入、输出单元;DIMe-数字输入单元;AXMe-模拟输入、输出单元;ERMe-事件记录仪;ESU-以太网网关;WTD-无线数据传输装置;TRITON-列车条件与状态信息系统;WSP-防滑器;BCU-制动控制单元。
图10机车网络控制系统拓扑
牵引控制单元TCU是牵引变流器的控制器,接收TCMS给出的机车牵引、制动设定力、辅助变流器输出频率设定、机车状态信息。TCU完成牵引变流器相应控制,并将其运行状态如牵引、制动力的反馈、牵引系统传感器数据、故障信息等反馈给TCMS。
无线数据传输装置WTD完成无线数据传输相关的功能,如接收GPS信息、无线故障下载等。TCMS与WTD之间通过以太网总线完成数据通信。
列车条件与状态信息系统TRITON是一个综合机车数据通信单元。TCMS按要求向TRITON系统广播机车实时输出数据信息,同时按要求接收TRITON的远程访问控制指令。
3.2特殊的控制功能
与国内一般的交流传动机车相比,南非20E机车具备以下特殊的控制功能。
3.2.1交直流供电切换
机车运行线路存在AC 25 kV区段与DC 3 000 V区段(见图11),控制系统需进行交直流供电切换控制。根据AC/DC检测装置发出的模拟量和数字量信号,TCMS进行逻辑判断识别机车进入交流供电区还是直流供电区,并将供电分制区信号送给TCU。当供电分制区信号得到确认后,TCMS控制AC/DC选择隔离开关置位,TCU控制牵引变流器内交直流转换开关置位,最终完成电路转换。
3.2.2自动轮径校正
当机车处于无转矩(惰行)运行且速度大于5 km/h时,TCMS可执行机车的自动轮径校正功能。校正后的轮径值显示在DDU上,当计算出的轮径超出最大的公差范围时,DDU上会产生报警信息。更换新轮时,允许以手动方式修改存储的轮径值。自动轮径校正功能提供两种轮径校正方式:
(1) 通过在DDU上输入参考轮径值,TCMS根据每轴的转速自动计算其他轴的轮径;
(2) 以GPS速度信号为依据,自动计算机车各轴轮径。

图11 交流与直流供电区
3.2.3基于WTB的8台机车重联控制
TCMS可进行8台机车的重联控制,通过WTB进行指令的传输及重联状态信息的反馈(包括故障信息),保证重联机车协调一致地运行,具体控制包括:
(1) 列车占用:主控机车发送列车占用信号到从控机车,从控机车识别到列车占用信号后,可允许进行后续的升弓、合主断等操作,否则从控机车处于待机状态;
(2) 受电弓控制:主控机车发送升弓/降弓指令到从控机车,从控机车依据自身条件判断是否允许升弓/降弓,受电弓状态反馈给主控机车;
(3) 主断控制:主控机车发送主断闭合/分断指令到从控机车,从控机车依据自身条件判断是否允许主断闭合,在重联模式下,各机车主断应依次间隔5 s闭合,主断状态反馈给主控机车;
(4) 方向识别:从控机车能识别主控机车牵引运行方向,并保持一致。
(5) 牵引、制动控制:主控机车发送牵引、制动力指令到从控机车,从控机车进行本车牵引、制动力给定控制,从控机车的牵引、制动力信息反馈至主控机车;
(6) 全局牵引封锁:当引起全局牵引封锁的条件出现时,执行全局牵引封锁,如总风压力低等;
(7) 全局电制封锁:当引起局部牵引封锁的条件出现时,执行全局电制封锁,如停放制动施加等;
(8) 半自动过分相:主控机车按下半自动过分相按钮后,重联编组中的所有机车同时进入过分相过程,但从控机车主断的闭合时间依据各机车实际是否通分相区而定;
(9) 切除、投入操作:在主控机车的DDU上可手动切除、投入重联编组机车上的子系统和电制动。
3.2.4LOCOTROL方式重联控制
LOCOTROL+WTB方式重联编组示意,见图12所示。

图12 LOCOTORL+WTB编组方式
当处于LOCTOROL方式重联时,主控编组与远程编组机车之间通过无线方式进行指令的传输及重联状态信息的反馈(包括故障信息),保证各重联机车协调一致地运行。在无线重联模式下:
(1) 主控编组中主控机车通过WTB总线实现本编组内部机车重联控制;主控编组中主控机车通过LOCOTROL发送控制指令(如受电弓升、降指令,主断闭合、分断指令,牵引、制动力指令等)至远程编组的从控机车,并通过LOCOTROL接收远程编组机车状态反馈信息;
(2) 远程编组中从控机车通过LOCOTROL接收来自主控机车的控制指令,并通过LOCOTROL反馈远程编组机车状态信息;远程编组机车通过WTB总线实现本编组内部机车重联控制。
3.2.5内电重联控制
TCMS具备内燃、电力机车重联控制功能,通过采用AAR27标准电缆,实施对内燃机车的控制并接收状态反馈。AAR27芯重联电缆包含74 V控制电源正线、负线,机车方向、牵引、制动指令、制动机有效及制动力、柴油机档位、撒沙、一般故障等信号。电力机车手柄级位与内燃机车档位则根据相应比例进行转换。
3.3远程监视与诊断系统
机车具备远程监视与诊断功能,能够通过GSM/GPRS等方式获取机车在线状态及故障数据。TRITON、WTD与TCMS之间通过以太网实现互联,TRITON接收TCMS传递的机车实时数据信息,以GSM/GPRS等方式(短报警信息)传递信息给TRITON地面设备,如关键安全故障(锁轴、火灾探测器被激活等)。TRITON还可以根据要求向TCMS发出远程访问控制指令。当TRITON故障时,WTD以GSM/GPRS等方式(短信息报文)传递信息给TRITON地面设备。机车远程通信功能示意见图13。

图13 机车远程通信示意图
WTD不仅能通过以太网与TCMS、TRITON进行数据通信,还可以通过RS422、RS485总线与智能电度表、辅助信息显示器ADU、充电机等进行数据通信。从而能获得极其全面的机车在线状态信息,如司机信息、站段信息、机车能耗、机车速度、机车设备状态等。当机车进入站段WIFI网络后,WTD能自动识别并连接有效的WIFI网络,并检测与ERM的通信状态,在通信正常情况下向ERM发出文件下载指令,由ERM将记录文件上传到WTD,WTD通过WIFI网络传输到地面服务器中。
4 结束语
从南非20E型机车在现场交付试验及长交路正线运用的结果来看,机车在牵引、制动控制、重联控制、过分制/分相控制等工况下运行稳定可靠,在低恒速控制、黏着控制等方面表现出优异性能,表明电气牵引及控制系统能很好的满足整车设计要求。自主开发的双流制电气牵引及控制系统突破了多流制机车的技术瓶颈,赢得了与国外先进技术同台竞技的机会,为中国机车产品的海外市场拓展起到了良好的示范作用。
[1]M.M.Bakran.大功率多流制机车牵引变流器的比较[J].变流技术与电力牵引,2006,(1):18-22.
[2]P.chapas.阿尔斯通开发的PRIMA 3U15型电力机车[J].变流技术与电力牵引,2005,(3):43-49.
[3]Berhard kieβ ling,Christian Thoma.欧洲BR189型多流制式电力机车[J].电力机车与城轨车辆,2004,27(6):37-41.
[4]王渤洪.奥地利铁路Rh1216系列多电流制通用电力机车—第3代EuroSprinter机车[J].机车电传动,2006,(2):53-57.
Electric Traction and Control System of South African 20E Dual System Electric Locomotive
LI Peng,GAO Shoucong,LIANG Xingyuan
(Technology Center, Zhuzhou CSR Times Electric Co., Ltd. Zhuzhou 412001 Hunan, China)
South Africa 20E electric locomotive is a dual system and AC drive electric locomotive, which is suitable for both 25 kV/50 Hz AC and 3 000 V DC power sources. The locomotive can adjust and configure the main circuit according to different power supply systems, and realize continuous and stable operation. This article introduces the design principle of the high-voltage circuit, the electric traction system, the function of the control system, and also analyzes the key elements and technical features of the design.
AC drive electric locomotive; dual system; multi system; electric traction system; control system
1008-7842 (2016) 01-0010-07
男, 工程师(
2015-11-23)
U260
Adoi:10.3969/j.issn.1008-7842.2016.01.03
猜你喜欢
现代城市轨道交通(2022年11期)2022-11-21
电气技术(2022年5期)2022-05-23
哈尔滨铁道科技(2020年3期)2021-01-18
铁道通信信号(2020年1期)2020-09-21
空间科学学报(2020年3期)2020-07-24
空间科学学报(2020年4期)2020-04-22
铁道通信信号(2019年7期)2019-10-08
铁道通信信号(2018年4期)2018-06-06
铁道通信信号(2016年9期)2016-06-01
铁路通信信号工程技术(2014年5期)2014-02-28