
基于PostEngineer虚拟仿真平台的舰艇导航装备虚拟保障研究*
2016-10-25 06:57李昂宗磊
舰船电子工程 2016年9期
李 昂 宗 磊
(海装天津局 北京 100071)
基于PostEngineer虚拟仿真平台的舰艇导航装备虚拟保障研究*
李昂宗磊
(海装天津局北京100071)
装备的操作和维修采用实装的训练方式普遍存在成本高、难度大、风险大、周期长的缺点,利用虚拟装备技术将训练的部分内容移植到虚拟装备上,能有效避免这些缺点,将具有完全自主二次开发能力的PostEngineer虚拟仿真平台应用于舰艇导航装备的虚拟维修设计,实现了X/XXXXXX型惯性导航系统的三维虚拟建模和交互。通过支持多领域知识的数字仿真求解引擎技术,建立了按系统运动规律运行及响应的X/XXXXXX型惯性导航系统虚拟模块,为用户提供了直观、逼真的维修训练环境。
虚拟保障;PostEngineer;舰艇导航装备;惯性导航
Class NumberTP391
1 引言
装备维修训练是军队装备工作的重要组成部分,是培养合格维修人员的重要保证。随着计算机技术的不断发展,通过模拟系统进行装备操作和维修训练己广泛应用到各种装备训练当中,成为了目前世界各国普遍采用的一种训练方式[1]。这一方式解决了实际装备维修训练的部分问题,具有操作
真实、应用范围广、针对性强等优点。因此,装备操作和维修训练的模拟系统成为各国军方的研制重点[5]。
虚拟维修训练系统是脱离实物装备而在虚拟装备上进行的一系列维修训练活动[6~7]。所谓虚拟装备是指利用虚拟现实的技术在计算机空间中建立装备的三维结构,模拟装备的运行原理、操作过程以及故障的诊断和排除过程,从而构造一个与
实物装备相对应的基于知识库的复杂软件系统[4]。虚拟装备技术一个最重要的特点是能够模拟装备的行为逻辑,并根据用户的输入给出相应的反馈,而装备的行为逻辑是可以设定的,例如用户可以向虚拟装备中植入错误的行为逻辑来模拟装备故障[2~3]。
装备的操作和维修采用实装的训练方式普遍存在成本高、难度大、风险大、周期长的缺点,利用虚拟装备技术将训练的部分内容移植到虚拟装备上,能有效避免这些缺点,同时基于虚拟装备的训练不受时间空间以及天气环境的限制,不受装备数量的限制,可反复实施而几乎不会增加成本[9]。尤其对于装备的维修训练来说,用实物装备来模拟各种故障几乎无法实现,而采用虚拟装备却可以轻松植入各种故障,学员在逼真的虚拟环境中使用各种仪器和工具对虚拟装备进行检测和部件更换,训练学员在不同故障条件下的维修方法[8]。
X/XXXXXX型惯性导航系统是水面舰艇和潜艇综合导航系统中的重要导航装备,承担着保障舰艇航行安全和为导弹、武备等系统提供航向、姿态等重要信息的重要使命。X/XXXXXX型惯性导航系统是自主式导航装备,在已知的初始条件下,不需要利用外界的信息,便可通过计算机推算出载体的速度、姿态等导航参数,连续提供本舰艇的姿态角(航向、纵摇、横摇)数字和模拟信息。其工作完全自主这一独特优点使其在现代作战舰艇特别是潜艇上的具有不可替代的主要作用[6,8]。将具有完全自主二次开发能力的PostEngineer(PE)虚拟仿真平台应用于舰艇导航装备的虚拟维修设计,实现了X/XXXXXX型惯性导航系统的三维虚拟建模和交互。通过支持多领域知识的数字仿真求解引擎技术,建立了按系统运动规律运行及响应的X/XXXXXX型惯性导航系统虚拟模块,为用户提供了直观、逼真的维修训练环境。
2 PE虚拟仿真平台
2.1虚拟仿真平台PE的特点
采用的虚拟仿真开发平台PE主要特点和优势如图1所示,具体内容如下:
· 完全自主知识产权,能够提供代码级的信息安全和技术保障。
· 便捷的二次开发,基于结构化脚本语言的二次开发模式,方便实现复杂的控制逻辑。
· 海量数据处理,基于LOD技术和轻量化技术的大规模图形快速显示和基于数据库的海量信息存储,能过满足模拟系统大量的图形和数据处理需求。
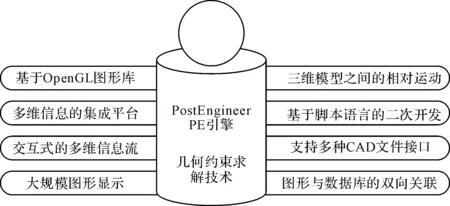
图1 PE仿真平台特点
· 基于通用标准OpenGL图形库开发,支持多种CAD格式(CATIA、UG、Pro/E、SolidWorks、Inventor、SolidEdge等)、3ds格式、VRML格式。
· 丰富的表现形式,支持图形、图像、文字、声音、视频、动画等多维信息的集成;支持各种特效的表现。
· 实时交互,支持用户通过鼠标、键盘以及控制台等各种直观的硬件设备对虚拟设备进行操作,虚拟装备能够根据用户的操作表现出与实际一致的反馈。
· 分布式协同仿真,支持基于局域网和广域网的多人多装备的协同仿真操作。
· 软硬结合,通过串口连接硬件和虚拟装备,实现虚拟设备与硬件的双向驱动,使仿真训练更加逼真。
· 基于虚拟设备的自动考核评估,代替传统的纸质考核方式,采用形象直观的虚拟设备进行考核和自动评分,同时能够记录操作过程,并进行回放和点评,达到更好的考核效果。
· 专业的领域知识库,提供面向行业的开发模板(如模型库、素材库、开发框架、仿真计算模型、表现手法等)知识库。
2.2虚拟仿真平台PE的架构
PE平台主要由三大核心模块、十大功能模块组成,核心模块包含显示引擎、求解引擎和流程引擎。显示引擎主要有基于通用开放的OpenGL图形库、基于LOD技术和轻量化技术的大规模图形快速显示。求解引擎支持多学科知识的求解(几何约束求解、运动学求解、电路求解)[5]。而流程引擎支持分布式协同仿真、支持时间轴+路由条件控制。
其功能模块主要有控制面板库、虚拟仪器库、虚拟工具库、虚拟人体模型库、输入输出接口、运动约束编辑器、电路关联仿真、碰撞检测、特效编辑器、成果发布、二次开发接口等部分组成。控制面板库可为用户提供常用的面板元件(如按钮、旋钮、滑块、开关、操纵杆、液晶屏等)的仿真模型。虚拟仪器库为用户提供常用的测量和检测仪器仪表(如万用表、示波器、试电笔、温度计、天平、测速表等)的仿真模型。虚拟工具库则可以提供常用维修工具(如扳手、起子、锤子、老虎钳等)的模型。虚拟人体模型库能够提供常用虚拟人体的仿真模型(几何模型、动作模型等)。此外,上述功能模块均支持用户自定义扩充。输入输出接口包括通用三维CAD(CATIA、UG、Pro/E、SolidWorks、Inventor、SolidEdge等)模型转换接口、3dMax模型和VRML模型的转换接口、数据库(Oracle、MS SQLServer、MySql、Access等)访问接口、硬件串口通信(如RS-232、RS-485等)接口[4]。运动约束编辑器支持用户通过定义各零部件之间的几何关系(如共面、共轴、平行、距离等)来约束其运动空间,当给驱动部件一个速度就能够带动其它关联部件的相对运动。用户导入标准电路图(如ORCAD、PSpice、Protel等)后,可通过电路关联仿真将电路元件与三维零部件模型进行关联,电路仿真计算的结果将驱动三维零部件状态的变化。系统的特效编辑器提供特殊效果的编辑手段,对机电设备的环境模拟得更加逼真。其成果发布和二次开发接口支持本地成果和WEB成果发布以及二次接口开发[10]。
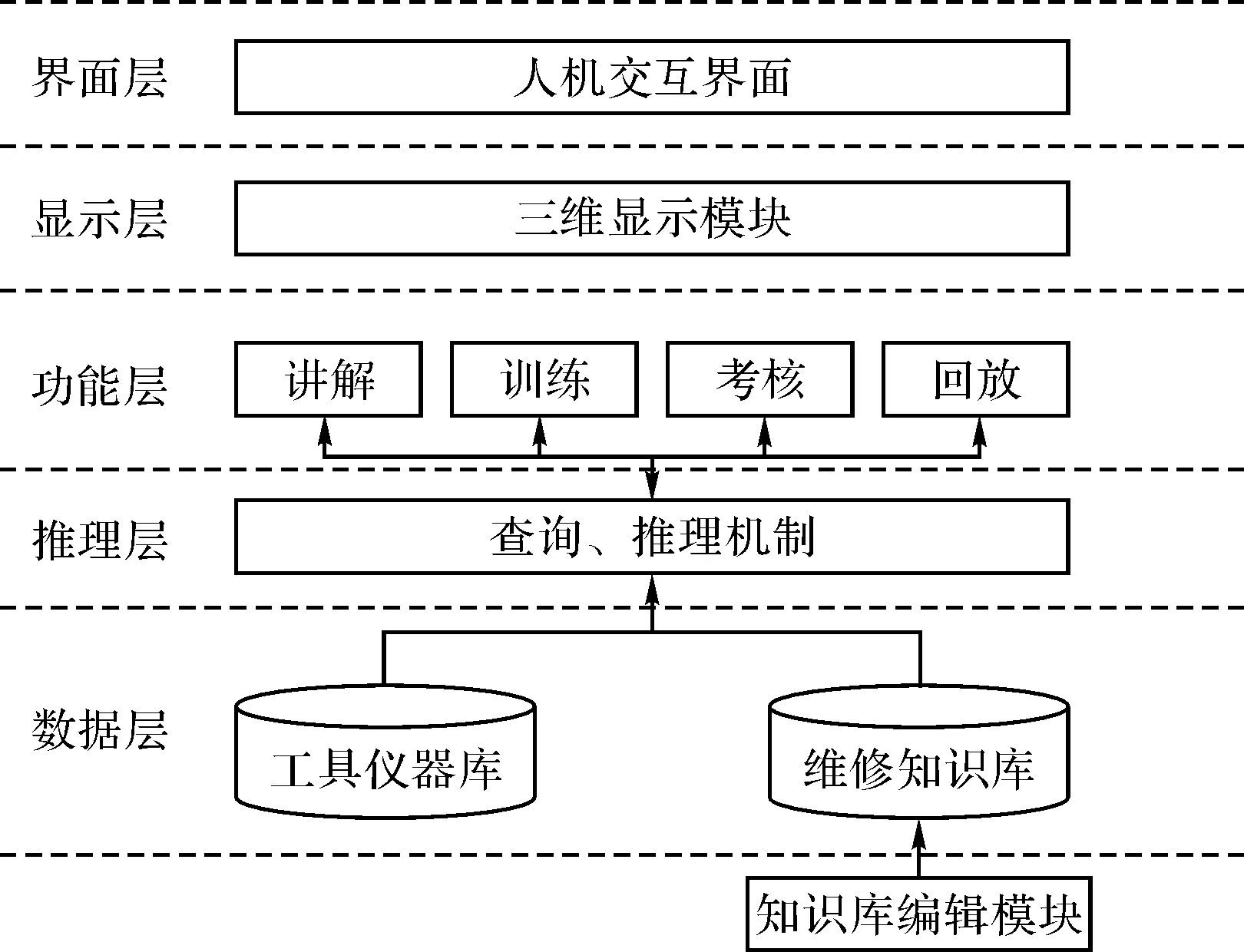
图2 PE虚拟仿真平台架构
3 虚拟维修实现
1)教学模块:
用户进入教学模块,首先从页面中选择一个故障现象,然后系统自动演示该故障现象的故障排除方法动画。
例如:
用户需要查看显示屏故障编号06的故障排除过程:
首先通过故障植入菜单植入编号为06的故障现象,点击确定。
系统进入故障06的排除动画:首先用户可以看到显示屏错误编码显示区显示为06,之后动画演示故障排除过程,打开机柜门,更换可能造成故障的电路板,更换后检查是否故障排除,如果没有排除,更换下一个可能造成故障的电路板。
可能造成06故障现象的故障点全部排出完毕。动画演示结束。
2)训练模块:
用户进入训练模块,首先选择或随机选择一个故障现象,并设置一个故障点。之后系统交由用户自己操作,用户自己根据从教学模块里面学到的故障排除方法来逐步排除故障,系统会对用户的操作步骤进行判断,并对错误操作给出提示。
训练模块的操作全部是用户自己交互完成,比如打开控制机柜门,需要用户用鼠标点击控制机柜模型上门锁。电路板抽出需要用户在电路板锁上进行鼠标点击。其中故障排除过程中需要用到的工具,比如螺丝刀、万用表、示波器等,都能够进行交互操作。
3)考核模块:
考核模块内容与实现方法同训练模块类似,不同在于当出现错误时系统不再提示,而是记录下错误步骤并扣分,如果是致命错误,直接结束考核。最后对考核过程进行点评回放并给出考核分数。
图3为虚拟故障实现效果图。
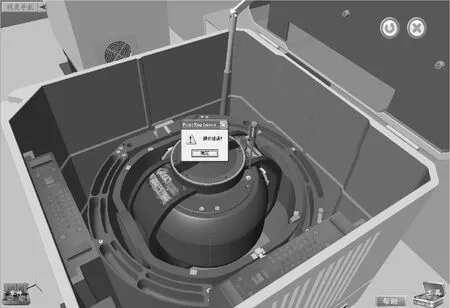
图3 虚拟故障界面
传统的设备装拆技术培训,采用真实设备,由有经验的师傅手把手的培训,不仅周期长、设备易损耗,而且容易存在事故隐患。为预防事故隐患和避免损伤设备,采用基于预先录制的视频文件回放来培训,但是这又没有交互功能[6~7]。多媒体制作系统的交互功能而是预先设定的,不能体现用户的个性需求。解决此问题的一种新的思路和方法是:基于虚拟现实技术的设备拆装。利用虚拟现实技术建立虚拟装拆系统,改变了传统的训练培训的模式,利用计算机产生逼真的实物代用品,并建立相应的模型,加入实时的人机交互性操作,使受训者可在设备不受损坏的虚拟环境下主动进行,模拟设备装拆的过程和流程,并以三维方式模拟和分析技术动作,通过这样的训练,对实物操作时具有很强的指导作用,从而进一步降低训练成本。图4是基于PE仿真平台的虚拟拆装实例。
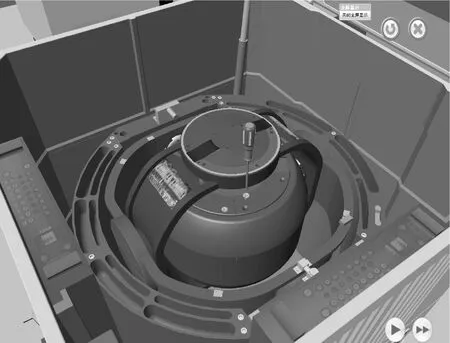
图4 拆装温控壳体
4 结语
为了提高X/XXXXXX型惯导使用、维护人员的操作技能和维护保养、故障维修水平,减少人为因素造成的设备故障,提高维修人员的维修能力,解决由于准备价格昂贵、研制生产单位产能限制而导致的院校任职培训、海军训练基地实操教学等缺乏实装设备问题,本文提出了一种基于PE仿真平台的三维虚拟建模技术,建立的X/XXXXXX型惯导虚拟拆装训练和系统典型故障训练模块直观、逼真,避免了采用实装训练成本高、风险大、周期长,尤其对X/XXXXXX型惯导的维修训练,用实装模拟故障几乎无法实现的缺点,大大提高了训练效果,节省了训练经费。
[1]周海渊,程龙,毛亮.基于虚拟仪器的惯导故障在线监测系统设计[J].现代电子技术2012,35(4):161-163.
[2]刘玉海,俞康伦,张锡恩.基于虚拟现实的装备维修仿真训练系统研究[J].计算机仿真,2009,19(2):49-51.
[3]苏瑞祥.船用惯性导航设备虚拟检测系统设计与实现[J].系统实践,2013(7):40.
[4]张秀山.虚拟现实技术及编程技巧[M].北京:国防科技大学出版社,1999.
[5]李星新,郝建平,柳辉.虚拟维修仿真中维修动素的设计与实现[J].中国机械工程,2005,16(2):156-160.
[6]肖田元,范文慧.系统仿真导论[M].北京:清华大学出版社,2010.
[7]李兴德,俞海英,伍红兵,等.基于数字媒体技术的军事模拟训练软件的设计与实现[J].计算机应用,2012(7):111-113.
[8]宋太亮,王岩磊,方颖.装备大保障观总论[M].北京:国防工业出版社,2014.
[9]陈庆华.装备保障能力评估建模研究现状与发展[J].装备学院学报,2012(4):1-4.
[10]马亚龙,邵秋凤,孙明,等.评估理论及方法及其军事应用[M].北京:国防工业出版史,2013.
[11]张磊,王族统,胡小响.一种基于仿真的装备维修保障能力评估方法[J].火力与指挥控制,2014(4):106-109.
Naval Craft Navigation Device Virtual Support Research Based on the PostEngineer Virtual Simulation Platform
LI AngZONG Lei
(Tianjin Bureau of Navy Equipment Department,Beijing100071)
Applying real equipment to the train of operation and maintenance of equipment generally has several disadvantages including high cost,big difficulty,high risk and long period.But the virtual equipment technique which transplants some parts of train to the virtual equipment is able to avoid these shortages effectively.Applying the PostEngineer Virtual Simulation Platform which owns the ability of independently secondary developing to the design of virtual maintenance of naval craft navigation equipment achieved the 3-D virtual modeling and interaction of X/XXXXXX Inertia Navigation System.By supporting several-field knowledge digital modeling solving engine technique,the X/XXXXXX Inertia Navigation System which runs and responses as the law of system’s motion is established,which provides an intuitive and vivid maintenance and training environment for users.
virtual safeguard,PostEngineer,naval craft navigation equipment,inertia navigation
2016年3月12日,
2016年4月22日
李昂,男,硕士,工程师,研究方向:惯性导航。宗磊,男,助理工程师,研究方向:惯性导航。
TP391DOI:10.3969/j.issn.1672-9730.2016.09.017
猜你喜欢
环球时报(2022-09-07)2022-09-07
成都信息工程大学学报(2022年3期)2022-07-21
舰船科学技术(2022年10期)2022-06-17
中学生数理化(高中版.高考理化)(2022年5期)2022-06-01
环球时报(2022-05-26)2022-05-26
军民两用技术与产品(2021年7期)2021-10-13
科学与财富(2021年33期)2021-05-10
小哥白尼(趣味科学)(2020年6期)2020-05-22
导航与控制(2017年6期)2017-12-20
汽车与新动力(2012年1期)2012-03-25
