
核电厂主泵振动控制技术研究
2016-10-20 10:07:43喻丹萍袁少波陈志高郭龙章黄勇波柳琳琳
中国核电 2016年2期
何 超,喻丹萍,袁少波,陈志高,郭龙章,黄勇波,丛 滨,柳琳琳
(1. 中国核动力研究设计院,四川 成都 610213;2. 中核核电运行管理有限公司,浙江 海盐 314300)
核电厂主泵振动控制技术研究
何 超1,喻丹萍1,袁少波1,陈志高2,郭龙章2,黄勇波2,丛 滨1,柳琳琳1
(1. 中国核动力研究设计院,四川 成都 610213;2. 中核核电运行管理有限公司,浙江 海盐 314300)
为解决秦山第三核电厂1号机组3号主泵的振动问题,通过在核电厂反应堆停堆期间,测量主泵系统的振动特性和模态参数,在反应堆启动升功率和满功率运行期间,测量主泵系统运行时的热位移、振动和相位变化过程,结合故障诊断分析技术、主泵运行历史数据分析、反应堆机组各种运行工况及运行参数变化对主泵振动的敏感度分析,确定了控制主泵振动的技术。首次将主泵振动水平控制在可长期稳定运行的优良水平,确保了核电厂反应堆长期安全运行的可靠性。
主泵;振动控制;故障诊断;敏感度分析
主泵是反应堆冷却剂系统和压力边界的关键设备,是核电厂的心脏。维持主泵安全、稳定运行关乎核电厂的核安全[1],因此,对该设备的状态监测显得尤为重要。振动作为衡量旋转机械运行状态的重要指标,对主泵运行状态的评价及故障诊断具有极为重要的作用。由于主泵体积庞大、结构复杂,在核电厂安全运行中所处的重要地位及高温、高压、高辐射的特殊运行环境和非大修期间不可停运的运行条件,对其缺陷开展故障诊断和振动控制难度很大[2]。目前,国内外对主泵振动治理最常用的手段多为大修期间现场动平衡试验及更换缺陷部件,但动平衡试验的计算方法和精度存在差异[3-5]。秦山第三核电厂1号机组3号主泵自安装调试起,就存在振动偏高的问题,期间在加拿大原子能公司(AECL)主导和国内后援院的支持下,采用机械对中、各处安装间隙调整等方案,振动超标问题得到暂时解决,但没有找到振动高的根本原因。自机组第三次大修后,3号主泵振动问题日趋恶化,直接影响机组安全运行。通过现场调研,在全面了解主泵振动历史后,文章提出以全面的现场试验测量为主,结合主泵振动处理的历史经验和旋转机械振动控制的理论研究,开展主泵振动控制技术的研究。

表1 主泵在线振动测量传感器及振动限值T able 1 On-line vibration measuring sensors and vibration limits for RCP
1 主泵介绍
1.1主泵结构介绍
秦山第三核电厂有2台机组运行,每台机组主回路有4台主泵,主泵为立式泵,单进口、单级、双出口,机械密封,输送介质为重水,5个叶轮,额定转速1 500 r/min,额定流量18.9 m3/s。主泵没有独立的基础,没有支座,通过倒锥型筒与电机下法兰连接,电机的支撑为两个弹簧吊架,主泵和电机的质量主要由吊架承担。主泵结构及在线传感器安装位置如图1所示。

图1 主泵结构及在线测量传感器示意图Fig.1 Sketch of RCP structure and on-line measuring sensors
1.2主泵振动介绍
主泵在线振动测量传感器及振动限值见表1,方向定义为:泵出口管道方向为X方向,泵与蒸汽发生器连接方向为Y方向,泵组高度方向为Z方向。图1中测量点1、2、3(V3X)为速度传感器,测量电机和泵轴承座振动,测量点4(S1X)、5(S1Y)为电涡流位移传感器,位于同一水平高度环向相差90°,测量主泵轴振动。综合分析主泵振动历史数据,有以下几个特点:1)机组热态调试期间,3号主泵出现振动高的情况,历时近1个月,问题得到暂时处理;2)自机组103大修开始,启动主泵,升温、升功率阶段3号主泵壳振较大;3)机组正常运行阶段,燃料通道换料时3号主泵壳振波动幅度大;4)机组正常运行阶段,3号主泵壳振受空调机组风机切换影响明显;5)V3X方向振动的优势频率为一倍频(约25 Hz)。
2 主泵振动控制技术研究总体思路
重水反应堆的4台主泵柔性安装在堆芯容器的周围,不同于常规压水堆主泵的刚性固定方式。反应堆已运行近十年,期间对主泵振动进行了多次处理,尽管处理结果不理想,但提供了各种处理方案对主泵振动水平影响的经验反馈。项目组确定以全面的现场试验测量为主,结合主泵振动处理的历史经验和旋转机械振动控制的理论研究,提出了有效的主泵振动控制技术,经现场实施验证了振动控制技术的有效性,确保了主泵长期安全运行的可靠性。主泵振动控制技术研究的总体思路如图2所示。
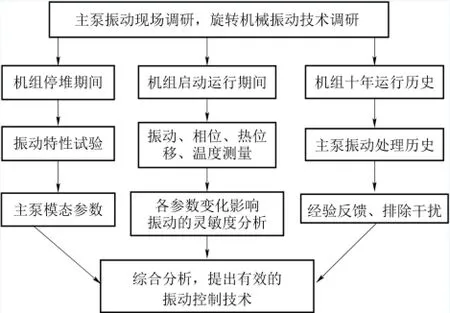
图2 主泵振动控制技术研究总体思路Fig. 2 General consideration about the technical study on RCP vibration control
3 主泵振动控制技术研究
3.1主泵振动特性试验
在机组大修停堆期间,将加速度传感器安装于3号主泵电机外表面,测量主泵和电机整体的模态,包括结构的固有频率、振型和阻尼比,和主泵运行时的优势响应频率进行对比,以此分析主泵运行时振动频率和结构固有频率的关系。
试验时同时测量结构上所有加速度计的响应,通过模数转换、快速傅里叶变换(FFT)将连续时间信号变成离散数字频域信号,选取关键测点为参考通道,经过计算求出各测点的频率响应函数,并通过参数识别方法辨识出结构的模态参数,得到X方向的一阶频率为4.9~5.65 Hz,二阶频率为27.4~28.0 Hz;Y方向的一阶频率为2.4 Hz,二阶频率为33.5~34.1 Hz。
在主泵启动和稳定运行阶段,分别对全部测点的响应进行了运行模态分析,在频率响应曲线上也只有25 Hz和125 Hz的主要频率,没有结构的固有频率出现。对于只有工作频率激励的旋转机械,无法激励出不同于工作频率的结构模态,只有结构的某阶固有频率和工作频率接近才能激励出结构固有频率,出现共振。因此,可以确定运行时主泵的异常振动不是由结构共振引起的。从振动响应的一倍频占主要成分分析,振动偏大的原因可能是主泵在某些工况下不平衡增大引起。
通过测量和分析主泵连接管道的振动数据,发现管道振动优势频率和其他位置的响应频率一致,均是由电机工作频率强迫激励所引起,管道的振动速度也较小,排除了振动由管道传递而来的可能性。
3.2主泵振动和相位测量与分析
通过分析主泵在升温升压、升功率阶段的测量数据和相应的图形、频谱得到:在温度或功率变化阶段,当泵组边界条件发生变化或边界条件处于不稳定状态时,会严重影响转子自身旋转的稳定性,转子不能及时进行自我调节到稳定状态,导致一倍频和五倍频振动分量放大、相位不稳定,表现为振动突然增大或来回波动;随着温度、功率稳定运行一段时间后,转子自我调节到稳定状态,通频振动、一倍频幅值和相位也相对稳定,并逐步接近大修前100%功率稳态运行时状态。因此可以初步判断,壳振过大的直接原因不是转子不平衡故障,而是由泵组边界条件的变化或不稳定引起。
3.3主泵热位移测量敏感性分析
大修期间,将弹簧式位移传感器安装于主泵电机热位移较大处,连续监测启泵、升温、运行期间主泵因为管道的热位移牵引导致的热位移变化,以此分析主泵热位移大小和振动的关系。
在大修后的启动调试期间,测量发现从冷态到热态主泵整体往堆芯方向移动较大,其中电机上部最大位移达到14.3 mm,锥形筒下部最大位移为9.95 mm。同时采用机械式测量方法(塞尺)测量了抗震垫间隙,与热位移传感器测量结果吻合,测量发现3号主泵的热位移远大于其他主泵的位移。
为进一步分析3号主泵异常振动原因,进行了热位移和振动速度随时间变化的敏感性分析,建立了温度、振动和热位移数据随着时间变化的关联,如图3所示。从图3可以看出,温度的变化导致热位移的变化,热位移的变化再导致振动速度的变化,可以认为热位移是导致振动异常的根本原因。

图3 热位移和振动速度随时间变化的敏感性Fig. 3 T he time-varied sensitivity of thermal displacement and vibration velocity
3.4主泵振动原因分析
通过开展振动控制技术研究,得到主泵振动异常的原因如下:1)3号主泵异常振动不存在结构共振,也不是由管道振动引起;2)主泵支撑结构为柔性支撑,泵组边界处于不稳定状态,温度变化引起的热位移是导致振动异常的根本原因;3)振动偏大的次要原因可能是主泵在某些工况下不平衡增大引起。
3.5主泵振动控制实施方案
根据主泵振动异常的原因,制定了振动控制的实施方案:1)在机组停堆期间,减少3号主泵电机上部B、D两侧抗震垫的预留间隙至(1.5±0.5) mm的值,蒸汽发生器(SG)侧保持不变;2)调整两出口管马蹄铁位于堆芯侧的预留间隙不小于7.0 mm,出口管远离主泵方向预留间隙不小于6.5 mm,允许出口管在热态时自由膨胀。
在下一个大修期间按照以上的振动控制方案进行了间隙调整。随后在主系统升温升功率期间测量了主泵的振动水平稳定在2.0 mm/s以下,处于良好可长期稳定运行的状态,证明了振动超标的根本原因分析结论是准确的,振动控制方案是有效的。
4 结束语
经过项目组各方共同努力,全面完成了反应堆主泵的振动特性和模态试验、振动监测和相位测量、热位移测量工作,结合主泵运行历史资料数据进行了综合分析,确定了主泵振动的根本原因,振动控制方案已应用于核电厂商业运行,验证了振动控制技术的有效性。本项目的现场试验方法和振动综合分析技术也为国际上同类型堆的反应堆主泵振动控制研究提供了借鉴经验。采用本项目的振动控制技术将反应堆主泵振动控制在可长期稳定运行的良好水平,在国内尚属首次,具有较大的经济效益和社会效益。
[1] 杨璋. 三轴承支承主泵振动特性研究[J]. 核动力工程,2015,36(3):84-87.(YANG Zhang. Study on the Vibration Characteristics of Threebearing Supported Primary Pump[J]. Nuclear Power Engineering, 2015, 36(3):84-87. )
[2] 吕群贤. 反应堆主泵现场动平衡[J]. 核动力工程,2002,23(3):63-68.(LV Qun-xian. On-site Dynamic Balance of Reactor Coolant Pump [J]. Nuclear Power Engineering, 2002, 23(3): 63-68)
[3] 肖孝锋. 秦山二期反应堆冷却剂泵现场动平衡试验[J]. 中国核电,2014,7(2):145-149.(XIAO Xiao-feng. Dynamic Balencing test on the site of Reactor Coolant Pump in Qinshan, 2014,7(2):145-149. )
[4] 赵振宇. 岭澳核电站主泵动平衡[J]. 中国设备工程,2011,04:32-34.(ZHAO Zhen-yu.(Dynamic Balance of the Reactor Coolant Pump of Ling Ao NPP [J]. China Equipment Engineering, 2011,04:32-34. ))
[5] 周念. 反应堆冷却剂泵振动诊断分析及处理[J].设备管理与维修,2014,8:68-69.(ZH O U Nian. Vibration Diagnosis and Treatment for the Reactor Coolant Pump [J]. Equipment Management and Maintenance, 2014, 8:68-69. )
Technical Study on Reactor Coolant Pump Vibration Control in Nuclear Power Plant
HE Chao1,YU Dan-ping1,YUAN Shao-bo1,CHEN Zhi-gao2,GUO Long-zhang2,HUANG Yong-bo2,CONG Bin1,LIU Lin-lin1
(1. Nuclear Power Institute of China, Chengdu of Sichuan Prov. 610213, China;2. CNNC Nuclear Power Operations Management Co., Ltd., Haiyan of Zhejiang Prov. 314300, China)
In order to find and solve the vibration problem of 3# reactor coolant pump (RCP)of Unit 1 of Qinshan Ⅲ, we have tried our best to measure the RCP's vibration characteristics and modal parameters in the shutdown period. When the RCP keeps working during both startup and full-power operation period, its thermal displacement, vibration and phase change process also have been monitored carefully and helpful data have been gathered. Through analyzing the historic operating data of RCP and its variation sensitivity related with the unit's different conditions as well as changing parameters, we have presented effective technique for vibration control of the RCP by combining fault diagnosis method. After feasible measures are developed according to this technique and efficiently implemented.
reactor coolant pump; vibration control; fault diagnosis; sensitivity analysis
TM623 Article character:A Article ID:1674-1617(2016)02-0102-04
TM623
A
1674-1617(2016)02-0102-04
2015-10-25
何 超(1983—),男,湖北仙桃市人,助理研究员,硕士,从事反应堆结构力学分析和设备故障诊断研究方向。
猜你喜欢
防爆电机(2022年3期)2022-06-17 01:41:10
紫禁城(2019年12期)2020-01-14 02:53:18
农家书屋(2019年4期)2019-05-15 08:25:28
中国电业与能源(2019年4期)2019-05-13 12:20:20
载人航天(2016年4期)2016-12-01 06:56:15
工程建设与设计(2016年2期)2016-08-22 09:13:02
电站辅机(2016年4期)2016-05-17 03:52:36
焊接(2016年1期)2016-02-27 12:54:45
核科学与工程(2015年2期)2015-09-26 11:57:01
核科学与工程(2015年2期)2015-09-26 11:56:59
