基于视觉传感的全景泊车辅助系统设计
2016-10-18 15:23魏莹晨甘泉张平改
科技视界 2016年22期
魏莹晨 甘泉 张平改
【摘 要】随着科学技术的不断发展,汽车电子正朝着多元化、安全化、舒适化的方向发展。本文设计一种基于视觉传感的全景泊车辅助系统,以便将车身周围全景图像提供给行车驾驶员,使其能够更为直观地把握汽车周边情况,实现辅助驾驶,从而提高行车的安全性。
【关键词】视觉传感;全景泊车;辅助驾驶
0 引言
近年来,随着人们生活水平的不断提高,我国汽车工业的快速发展,机动车逐渐走入家庭。目前,据相关部门统计,我国机动车保有量达到9200万。越来越多的机动车出现在道路上、街道内、停车场里,导致道路交通日益拥堵,这给驾驶员也带来了诸多不便,道路安全隐患也呈逐渐上涨的趋势[1-2]。据交通管理部门和国家统计部门的相关数据显示,中国每年大约有八万人死于交通事故,道路交通伤害已成为世界10岁至18岁青少年死亡的最重要原因之一[3]。
调查发现,当司机倒车或停车时,发生事故的概率占道路交通事故的比例较大。造成这一事故的原因有很多,其主要表现在以下三个方面:首先,驾驶者在车内的视觉盲区;其次,恶劣天气对驾驶员视野的影响;最后,驾驶员的驾驶技术。其中视觉不畅最容易造成事故,引起人员伤亡和相关财产损失。2010日9月7日,江苏新沂一名三岁半的男孩在一辆奥迪轿车后面玩游戏,由于视觉盲区,驾驶员在车上并没有意识到,导致汽车发动后直接从男孩身上的碾压过去,男孩当场死亡。因此,全景泊车辅助系统的开发,不仅可以解决驾驶员的后顾之忧,安全驾驶,从而减少不必要的损失和人员伤亡。
所谓的全景泊车辅助系统,是指能够为驾驶员实时显示车辆周围视频图像,可保证驾驶员实时掌握车辆周围的最新情况,包括可能存在的障碍物以及来往行人,扩大驾驶员的视野。本文为了消除汽车启动、行使或停车过程中的盲区,从软、硬件两个方面对全景可视化辅助泊车系统进行初步设计。
1 系统硬件电路设计
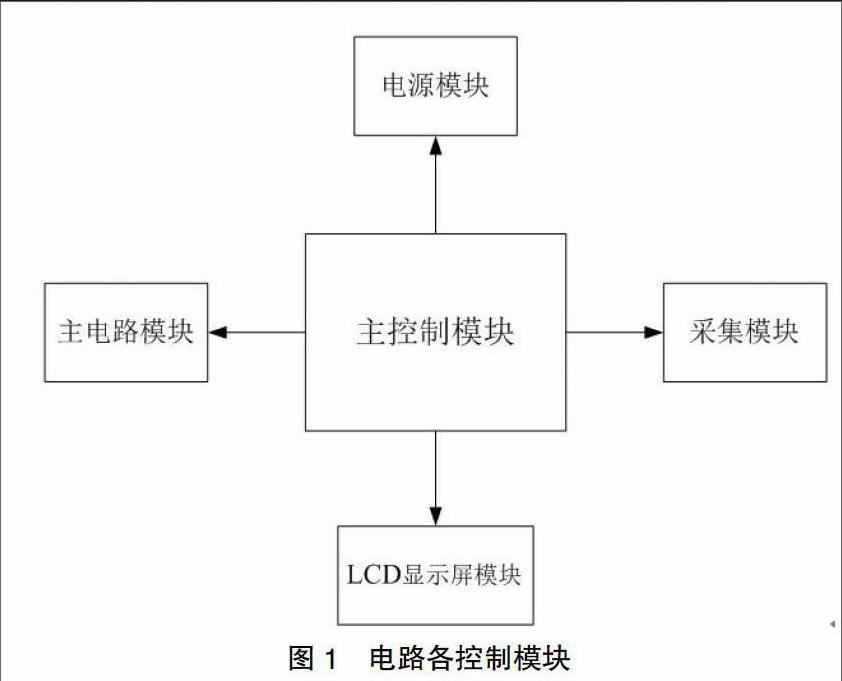
为了更好的展示全景泊车辅助系统硬件设计方案,可将整个系统分成电源模块、主电路模块、采集模块、LCD显示屏模块4个部分,如图1所示。其中视觉部分主要由CMOS摄像头,图像处理单元和显示屏幕构成[4]。图像处理单元中采用数字信号处理器来完成视频图像处理,主要由 ADC、DSP和DAC组成;CMOS视频传感器将车身周围的视频图像传输给图像处理单元;系统的显示部分由驾驶室中的一块LCD显示屏组成,将系统处理后的全景视频图像提供给驾驶员。
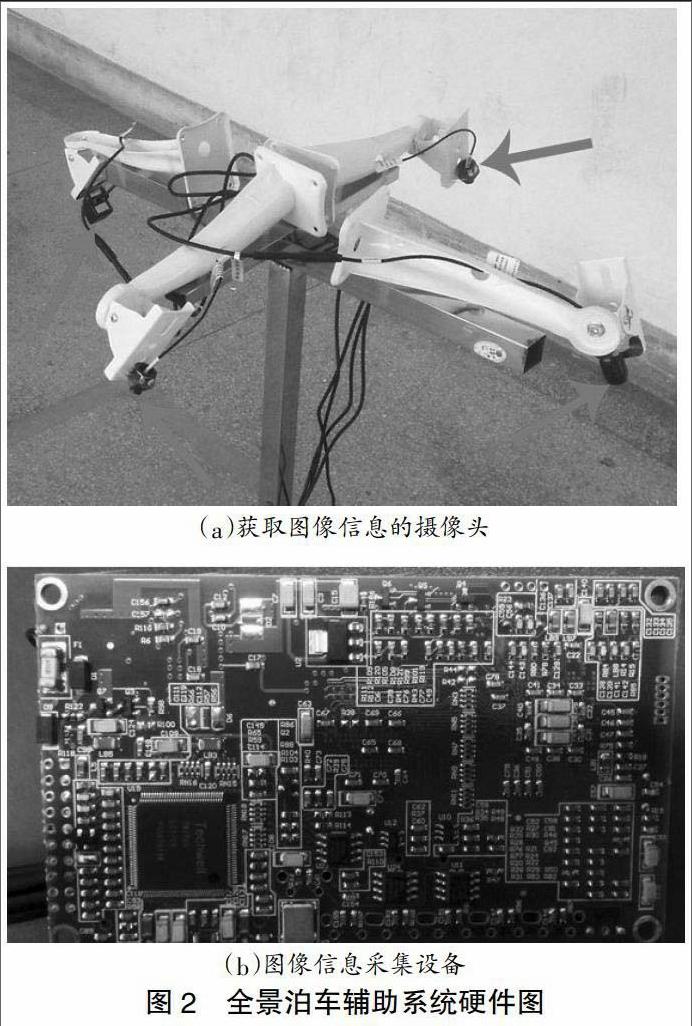
整套的多源汽车全景显示系统仿真实验硬件包括个人电脑、图像采集设备和4个摄像头,如图2所示。
其中,4个摄像头是用来采集仿真模型四周的图像,以提供给图像采集设备进行信息的存储,如图2(a)箭头所指位置,图像采集设备是用来获取图像信息,以解决提供给个人电脑进行图像的处理,个人电脑是本次实车模型仿真实验的核心部分,相对于该系统的CUP结构,主要用来图像信息的处理与输出,在后期的研究中,需将中央处理器独立出去,从而形成一台正真意义上的多源汽车全景系统。
2 系统软件设计
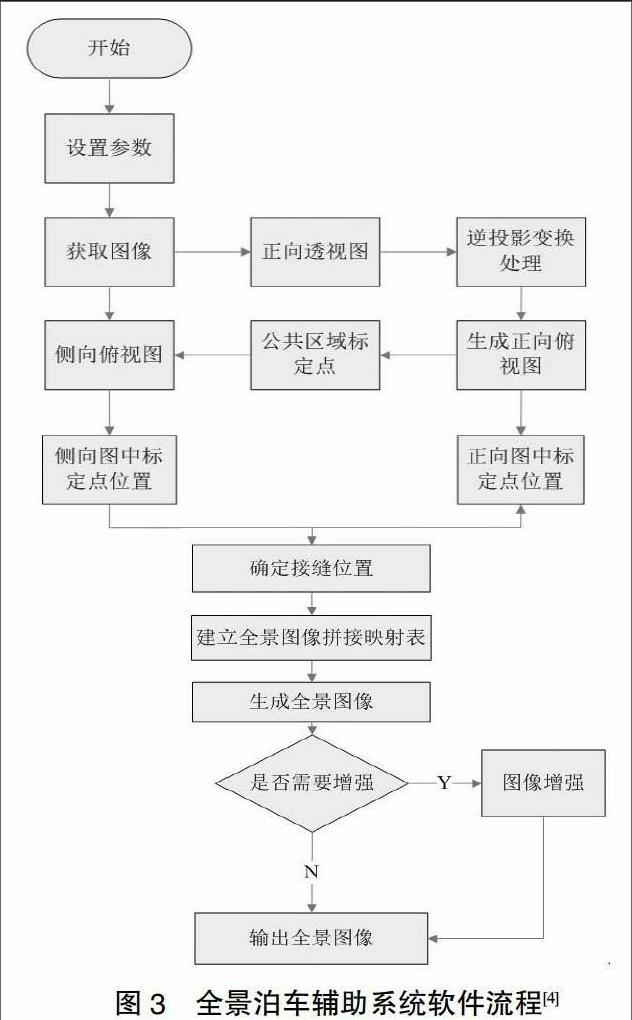
系统软件流程如图3所示,首先对系统的参数初始化,设置前后左右4个摄像头水平方位和垂直方位等参数,以保证最大重复区,便于后期的图像拼接处理;然后进入图像预处理模块,将获取车身周围的图像分成两组,并采用图像逆投影变换方法将车前和车后透视图转换成鸟瞰俯视效果图;并在相邻摄像头覆盖的公共区域内采用SIFT方法寻找特征点,在待拼接图像中确定拼接点的位置,以实现图像的无缝连接,并在此基础上,采用基于分层模型的图像融合方法,对原始图像进行划分成块以选择同一位置像素较为清晰的区域,利用加权平均法对其边缘进行融合,当所计算区域的值相近时,则对该区域进行子模块的划分,重复上述融合方法,最终得到融合后的效果图;待汽车周围的图像拼接、融合完成后,生成全景图像拼接映射表保存,同时,为保证驾驶员的最佳视觉效果,驾驶员可以根据周围的亮度来选择是否全景图像增强处理图像和输出增强处理的全景图像的全景图像。
3 实验验证
本文采用Matlab的GUI进行图像界面的设计,将镜头所采集的图像显示在所设计的界面上,并通过图像拼接技术、图像融合技术将四幅图像进行合成,以形成一幅汽车四周模拟的全景图像,提供给驾驶人员,方便其驾驶行车。在登陆系统后,点击“图像采集”按钮进行汽车四周图像的采集,如图4所示[5]。
然后,点击“现有技术”按钮与“所提方法”按钮进行全景泊车辅助系统图像处理,结果如下:
从图5可以看出,本文设计得全景图融合效果较好,图像的连续性较强,较好满足了人们的视觉要求。
4 总结
本文主要介绍了全景可视化辅助停车系统的应用背景、系统的设计目标和功能,并进一步设计了全景视觉辅助停车系统硬件结构和软件流程,最后,实验生成全景图像以验证全景可视化辅助停车系统设计的有效性。
【参考文献】
[1]Kai-Che Liu, Hurng-Sheng Wu. Automatic Distortion Correction of Endoscopic Image Captured With Wide-Angle Zoom Lens[J].IEEE Transactions on Biomedical Engineering,2013,60(9):2603-2612.
[2]吴永祺.基于全景视觉的汽车安全驾驶辅助系统的设计研究[D].华南理工大学,2014.
[3]张平改,魏利胜,周圣文.基于图像融合的泊车辅助系统研究[J].安徽工程大学学报,2015,30(5):58-62.
[4]赵凯.全景可视化辅助泊车系统研究[D].合肥工业大学,2011.
[5]魏利胜,张平改.基于分层模型的图像快速融合方法研究[J].系统仿真学报, 2016,28(6):1372-1379.