
一种三自由度并联机器人的参数化建模及其优化设计
2016-10-18 09:58:50黄秀琴
制造业自动化 2016年9期
黄秀琴,潘 晨
(常州工学院 机械与车辆工程学院,常州 213002)
一种三自由度并联机器人的参数化建模及其优化设计
黄秀琴,潘晨
(常州工学院 机械与车辆工程学院,常州 213002)
以3-PRS并联机器人为研究对象,由布置在倾斜导轨式上的三个滑块驱动。基于虚拟样机技术,实现了并联机器人的参数化建模及以动平台获得最大姿态角为目标的优化设计,从而获得该并联机器人机构较合理的结构参数,为该并联机器人潜在的工业应用提供了坚实的理论基础。
三自由度;并联机器人;参数化建模;优化设计
0 引言
并联机器人因其在结构上较大的刚度、较强的承载能力以及累积误差小等特点,逐渐引起国内外学术界和工程界的广泛关注。而3、4、5自由度的少自由度并联机器人机构,是并联机器人机构学研究领域的一个重要分支,尤其是三自由度并联机器人机构具有简单结构、刚度大、低惯性、负载高、运动速度快等特点,成为并联机器人机构学研究的热点之一[1]。
本文以能实现一平移二转动3-PRS并联机器人机构作为研究对象,由布置在倾斜导轨上的三个滑块驱动,在ADAMS平台上进行了参数化建模和以动平台获得最大姿态角为目标的优化设计,为该并联机器人机构潜在的工业应用奠定了坚实的理论基础。
1 机构描述
如图1所示,该机构由下静平台、上动平台和连接于两平台之间的3条支链PRS组成,静平台和动平台通过三组连杆和滑块相连,静平台和滑块之间采用移动副,滑块与连杆之间采用转动副,连杆与动平台之间采用球铰副。其中静平台为角度110°的三角锥形双层结构,三角锥的上下面均为正三角形,同理动平台也为正三角形结构,驱动滑块布置在静平台的三个倾斜的导轨上来改变动平台的位置和姿态,实际设计用滚珠丝杠驱动提高机器人运动的精度。机构示意图如图1所示。

图1 并联机器人机构示意图
2 3-PRS并联机器人的参数化建模设计
2.1点的创建及模型的初始化
根据图2所示,建立该并联机器人的虚拟样机模型需要创建15个关键点,初始的15个点如图3所示,再在点与点之间用ADAMS自带的Bodies工具创建动平台、静平台(机架)及连杆和滑块等。在不影响机构的自由度及运动的输入输出关系的前提下,各构件可以简化。这样就可以在ADAMS平台上建立其并联机器人的参数化模型,该模型结构简单,构件之间的连接不必细化,通过设置构件之间的Connectors(约束)满足机构自由度的要求,具体为:球与静平台之间沿导轨方向上施加移动副、球与连杆之间加转动副、连杆与动平台之间加球副、静平台与大地之间加固定副。模型如图4所示。
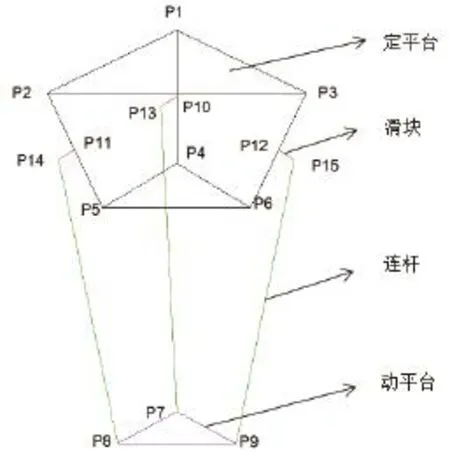
图2 并联机器人参数化建模示意图
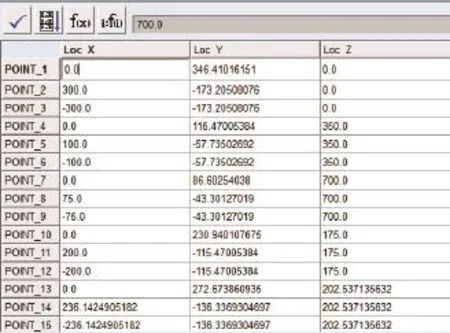
图3 点的初始创建

图4 参数化模型
2.2设计变量的创建
所谓参数化设计,就是利用设计变量的值代替确定设计参数的值,并且改变设计变量的值就可以改变设计参数的值。同时,与状态变量最大的不同点就是,状态变量在计算时是可变的,而设计变量在计算时是不可变的,它只有在设计时改变。
通过对图4所示的模型简图分析可知,整个模型的结构尺寸,都与15个关键的point有关。绝对坐标系位于定平台上三角的中心,point_1、point_2和point_3为定平台上三角的顶点,point_4、point_5和point_6为定平台下三角的顶点,point_7、point_8和point_9为动平台顶点,point_10、point_11和point_12为连杆中点,point_13、point_14和point_15为滑块短杆顶点。所以定义5个设计变量:
1)r1:定平台上三角形外接圆半径,范围初定义为(200,600);
2)r2:定平台下三角形外接圆半径,范围初定义为(50-600);
3)r3:动平台三角外接圆半径,范围初定义为(50,600);
4)h1:定平台上下三角形之间的距离,范围初定义为(200,800);
5)h2:动平台与绝对坐标原点之间的距离,范围初定义为(200,1000)。
2.3模型参数化
在参数化之前需要明确,对于动平台、定平台和连杆的参数化只需要参数化对应关键点就能达到参数化的目的,难点在于滑块的参数化。
在本模型中之所以没有选择矩形滑块,是因为矩形滑块的参数化是需要由矩形角上的局部坐标参数化决定,而不是质心决定,所以在位置和方向的上参数化较为困难。因此选择了球形滑块,球形滑块的参数化只与球心的坐标参数化有关,而球心在创建时就与对应关键点相关,所以参数化又归结到了关键点的参数化。
本模型中一共包含三个移动副、三个转动副和三个球铰副。转动副和球铰副随点变化,需要参数化的也就是滑块与导轨之间移动副的参数化。
经过分析,下一步要做的就只有关键点的参数化和移动副的参数化。
2.4点的参数化
由设计变量的定义可以轻易得出以下几点:
1)Point_1=(0,r1,0)
2)Point_2=(0.866*r1,-0.5*r1,0)
3)Point_3=(-0.866*r1,-0.5*r1,0)
4)Point_4=(0,r2,h1)
5)Point_5=(0.866*r2,-0.5*r2,h1)
6)Point_6=(-0.866*r2,-0.5*r2,h1)
7)Point_7=(0,r3,h2)
8)Point_8=(-0.866*r3,-0.5*r3,h3)
9)Point_9=(-0.866*r3,-0.5*r3,h3)
10)Point_10=(0,0.5*(r1+r2),0.5*h1)
11)Point_11=(0.433*(r1+r2),-0.25*(r1+r2),0.5*h1)
12)Point_12=(-0.433*(r1+r2),-0.25*(r1+r2),0.5*h1)
但是Point_13、Point_14和Point_15相对复杂,需要进行分析计算。
(1)Point_13计算
因为Point_13始终在Global YZ方位工作平面上,且Point_1=(0,r1,0)、Point_4=(0,r2,h1)、Point_10=(0,0.5*(r1+r2),0.5*h1),设定滑块短杆的长度为50mm。
则LINK14的斜率K=h1/(r2-r1)。令K*K’=-1,则K’=(r1-r2)/h1。则Y13=0.5*(r1+r2)+80*cos(arctanK’),Z13=Z14=Z15=0.5*h1+50*sin(arctanK’),X13=0。则Point_13=(0,0.5*(r1+r2)+50*cos(ATAN((r1-r2)/ h1)),50*sin(ATAN((r1-r2)/h1))+0.5*h1)。
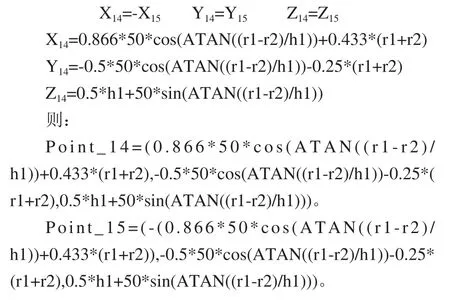
(2)Point_14和Point_15计算
由于Point_14和Point_15关于平面YOZ对称,则:
2.5移动副的参数化
3 参数化模型的仿真分析
驱动参数设为50*Cos(0.1*time),进行仿真,具体参数设置及角度测量图,如图5所示。
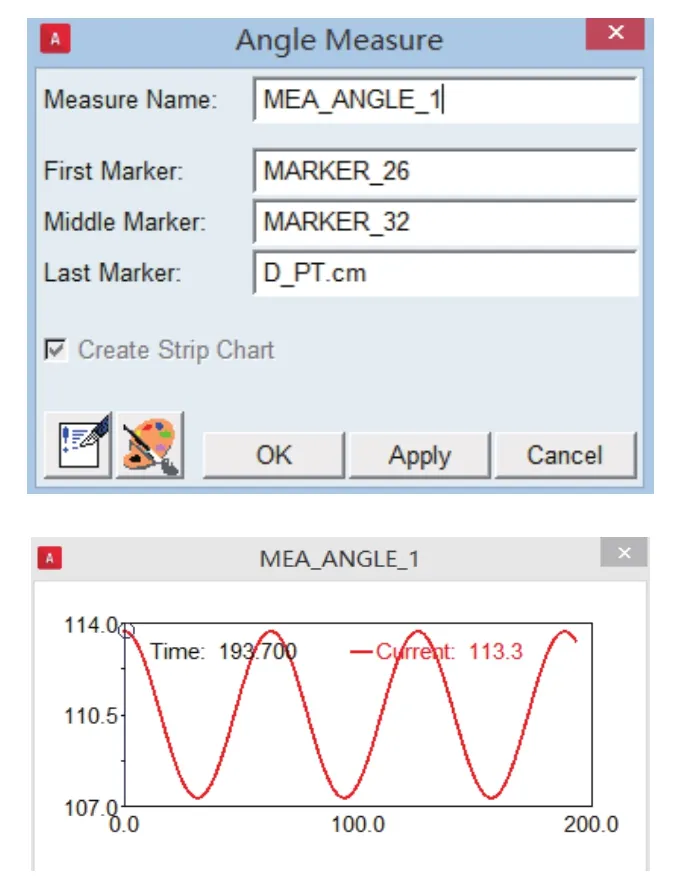
图5 测量过程图
1)在主工具栏的Design Exploration栏的Measures工具条中选择,创建新的角度测量;
2)在Measure Name栏中,将名称改为MEA_ ANGLE_1,该测量结果为动平台姿态角之一,是后续优化设计的对象;
3)在First Marker栏中,右击选择【Marker】【Pick】在point_13处选择坐标MARKER_26;
4)在Middle Marker栏中,右击选择【Marker】【Pick】在point_7处选择坐标MARKER_32;
5)在Last Marker栏中,右击选择【Marker】【Pick】,选择动平台质心D_PT.cm。完成测量创建。
4 优化设计
对本课题优化的主体是动平台,优化目标是让动平台的运动范围最大化。因为运动范围没办法直接研究,所以我们选取之前测量的平台姿态角作为间接测量。而姿态角的大小又与模型的结构尺寸有关,所以选取之前设定的r1,r2,r3,h1,h2作为设计变量。因为没有明确的约束条件,所以我们只需根据结构的合理性,适当调整设计变量的范围来保证结构的合理。
1)明确目标函数
本研究优化的目标函数取测量的动平台摆角MEA_ANGLE_1作为目标函数。
2)函数关系
由模型分析可知目标函数与模型结构尺寸有关,自然而然与之前定义的变量有关,所以可以建立A=G(r1、r2、r3、h1、h2)的函数,由于ADAMS拥有设计评价工具,所以我们不需要计算出具体函数,但是要明确他们的关系。
3)调整设计变量
打开变量修改对话框,依次修改r1,r2,r3,h1,h2如图7所示。
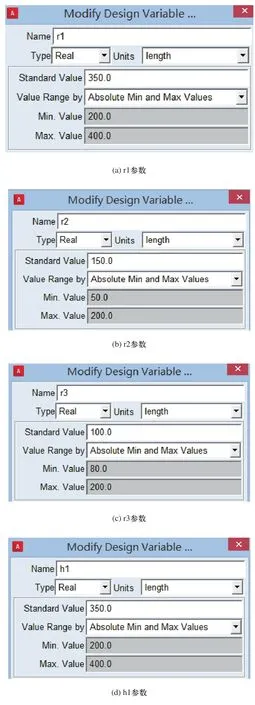
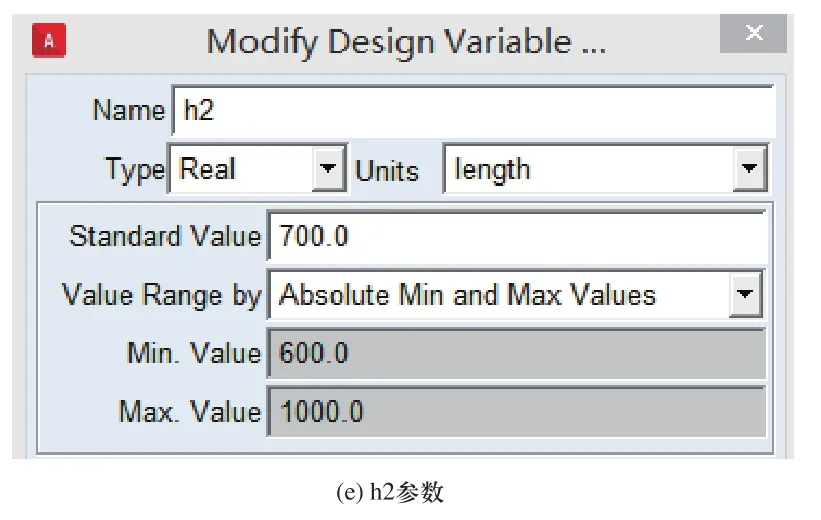
图6 设计变量的设置
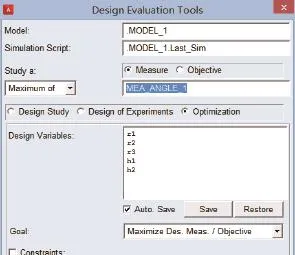
图7 设计项设置
4)运行优化分析
(1)设置驱动函数为50*cos(0.1*time),仿真时间设为End time100,Steps100,运行一次仿真。
(2)在主工具栏Design Exploration栏Design Evaluation工具条中选择设计分析工具,点击打开,弹出对话框如图8所示。
(3)目标函数选择平台摆角MEA_ANGLE_1,类型选择最大值(Maximum)。
研究类型选择优化Optimizaton,设计变量选择r1,r2,r3,h1,h2,目标类型选择最大化,各项设置如图8所示。
(4)点击Start开始优化,最后得出如图9所示的分析图和如表1所示的优化结果。
从图9可以看出,经过两次迭代运算,ADAMS找到一个最优点,使动平台姿态角由114.3°增加到了129.3°。可见,该三自由度并联机器人机构可以作为裸关节康复训练机的主运动机构,129.3°最大姿态角足以保证训练中所需的角度。
5 结论
本论文以3-PRS并联机器人机构为研究对象,改变
【】【】
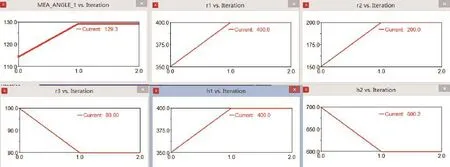
图9 优化分析图

表1 优化结果
传统结构形式,将驱动滑块布置在倾斜导轨上来提高滑块的行程。
1)在ADAMS平台上对3-PRS并联机器人实现了参数化建模并进行了初步的仿真,该仿真结果即为优化的对象。
2)通过设置各个设计变量的变化范围值不断改变参数,以动平台获得最大姿态角为优化目标进行了参数的优化,获得了优化后的并联机器人具体的结构参数。验证和考察了该并联机器人机构可以作为裸关节康复训练机的主运动机构,为该机器人机构的工业化应用奠定了坚实的理论基础。
[1] 黄真,孔令富,方跃法.并联机器人机构学理论及控制[M].北京:机械工业出版社,1997.
[2] 金琼.过约束机构与欠秩并联机器人机构研究[D].南京:东南大学,2001.
[3] 葛胜兰.3PRS并联机器人运动仿真的实现[J].机械研究与应用,2006,19(4):82-83.
[4] 刘峰,陈文凯.3自由度并联机器人的研究现状和应用前景[J].企业技术开发,2006,1.
[5] 李增刚.ADAMS入门详解与实例(第2版)[M].北京:国防工业出版社,2014.
Parametric modeling and optimal design of a three degree of freedom parallel manipulator
HUANG Xiu-qin,PAN Chen
设计与应用
TH246
B
1009-0134(2016)09-0068-05
2016-06-12
黄秀琴(1969 -),女,江苏溧阳人,硕士,主要从事机构学、并联运动机械、CAD/CAM的研究。
猜你喜欢
中学生数理化·中考版(2021年10期)2021-11-22 07:26:40
小学生学习指导(高年级)(2021年4期)2021-04-29 02:17:10
河北理科教学研究(2020年2期)2020-09-11 06:15:48
中国环境监察(2016年7期)2016-10-23 05:36:30
通信电源技术(2016年1期)2016-04-16 04:57:26
通信电源技术(2016年5期)2016-03-22 01:09:37
数学年刊A辑(中文版)(2015年2期)2015-10-30 01:56:14
中国塑料(2015年9期)2015-10-14 01:12:35
河南科技(2015年2期)2015-02-27 14:20:28
新高考·高二数学(2014年7期)2014-09-18 00:42:02
