
基于弹光调制旋光测量的信号解调系统*
2016-10-17 07:27王志斌吕润发李克武武向辉
传感技术学报 2016年7期
刘 顺,李 晓*,王志斌,吕润发,李克武,景 宁,武向辉
(1.中北大学山西省光电信息与仪器工程技术研究中心,太原030051;2.中北大学计算机与控制工程学院,太原030051)
基于弹光调制旋光测量的信号解调系统*
刘顺1,2,李晓1,2*,王志斌1,吕润发1,李克武1,景宁1,武向辉2
(1.中北大学山西省光电信息与仪器工程技术研究中心,太原030051;2.中北大学计算机与控制工程学院,太原030051)
考虑到弹光调制技术PEM(photo-elastic modulation)测量光学旋光高灵敏度、高精度的优点,设计了一种基于PEM的软硬件相互配合的旋光数据解调系统,以满足实时稳定的旋光角度测量要求。在FPGA内使用多通道直接数字频率合成技术DDS(Direct Digital Synthesis),采用同一频率控制字产生PEM的驱动信号和数字锁相的倍频参考信号,保证了信号的同频同源。弹光调制信号的交流序列和直流序列分别通过两路串口设备并行传输,LabVIEW完成串口资源配置和数据缓存,经数字锁相解调得到光学旋光角度。实验表明,在旋光角为8.52×10-5rad时,系统的标准偏差是1.48×10-6rad。
数字解调;锁相放大器;弹光调制;LabVIEW
EEACC:7220;4180doi:10.3969/j.issn.1004-1699.2016.07.013
线偏振光通过某些双折射晶体时振动面发生旋转的现象称为旋光现象[1-3],通过对旋光角的测量可以实现对样品的纯度、浓度、结构及成分等的分析。目前旋光角的测量大多通过旋光仪来实现,如上海精科的SGW-1型自动旋光仪、上海仪迈IP120-digi4数字平台旋光仪、美国PerkinElmer公司的341/ 343型自动精密旋光仪,它们的精确度最高为0.002°(约3.49×10-5rad),仅能满足精度要求不高的常规应用领域。2015年我们首次提出了一种基于弹光调制PEM(Photo-Elastic Modulation)的高精度(精度高达10-7rad)旋光角测量方法[4],该方法具有灵敏度高、精度高、稳定性好等优点[5-6]。目前主要采用锁相放大器对微弱信号进行解调,其中锁相放大器主要以FPGA、DSP、ARM等作为核心控制单元[7-14],此类方法在用于PEM旋光角度测量信号的解调时,具有设计成本高、系统结构复杂等不足。
本文提出了一种软硬件相互协调的PEM旋光信号解调方法。由FPGA提供与待测信号同频同源的参考信号,并提取出与PEM双折射无关的二次谐波分量;通过LabVIEW设计锁相放大器进行信号解调,得到二倍频电压信号的幅值,结合直流分量的幅值测得样品的光学旋光角度。该系统设计成本低、结构简单、稳定性较高、移植性较强。
1 原理
1.1旋光测量系统
为了提高旋光测量精度和灵敏度,我们设计了如图1所示旋光测量系统。探测激光依次经起偏器、被测旋光样品、PEM,最后经检偏器入射到探测器[4]。起偏器和检偏器的偏振轴相对于PEM的快轴方向分别取0°和45°。

图1 旋光角测量系统
将探测器输出的直流信号和交流信号分别提取出,直流信号经低通滤波器输出得到直流项

其中,K1是与探测器相关的光电转换系数,I0为检测激光通过起偏器后的强度。
对于交流信号,我们主要选用与PEM剩余双折射无关的二倍频项信号作为研究对象。先将交流信号经前置放大器转换为电压信号并放大,再运用锁相放大技术提取出对应的二倍频项

θ为旋光角,J2为2阶贝塞尔级数,K2是由前置放大和锁相增益决定的系数。据式(2)可知,二倍频项与旋光角成正比,结合直流项式(1),得到旋光角

其中,K是系统的比例系数,定标得到K=7.23×10-4rad。
上述得到的信号序列经AD单元采集传入FPGA进行寄存,并与FPGA提供的正弦、余弦参考序列经两路串口设备并行传入PC机,经LabVIEW解调,最终实现旋光数据的采集处理和实时显示。
1.2数字锁相原理
数字锁相是利用与被测信号有相同频率和相位关系的参考信号作为基准,从噪声中提取微弱有用信号的方法。本设计采用双通道的数字相关解调算法[15],两个通道的参考信号分别为正弦序列和余弦序列。设正弦参考序列为rs(k),输入信号的频率为fo,AD的采样频率设为fs,令fs=N×f(N≥3)。对输入信号S(t)采样后获得的数字序列为

其中A为模拟信号的幅值,θ为初始相位。则rs(k)和S(k)对整个周期采样的互相关函数Rsrs为

其中,M=N×q是q个周期内总采样数,B为参考信号的幅值。
同理,设余弦参考序列为rc(k),则rc(k)和S(k)对整个周期采样的互相关函数为

若令参考信号的幅值B=1,对式(5)、式(6)进行平方和运算,消去参考序列和待测序列之间的相位差θ,得到待测序列的幅值为

本设计中,选取待测序列的二次谐波分量作为研究对象,将采集到的交流信号在LabVIEW中进行上述的双通道的数字解调,经过相关器计算得待测信号与正弦、余弦参考序列的互相关函数和,带入式(7)即可得到式(2)中待测信号交流序列的二倍频幅值V2f。
2 系统硬件设计
图2为硬件设计原理图,在参考时钟的驱动下,相位累加器对频率控制字进行线性累加,相位累加器输出的数据就是合成信号的相位,相位累加器的溢出频率就是直接数字式频率合成器DDS(Direct Digital Synthesizer)输出的信号频率。用相位累加器输出的数据作为波形存储器(ROM)的相位取样地址,将所要产生信号的幅值离散为不同的数字,并放入ROM中,再将对应的相位幅值线性累加,最终产生所需要的一定频率的数字信号。其中,DDS3为高压驱动电路的方波驱动信号,DDS1、DDS2分别为二倍频正弦、余弦参考信号。
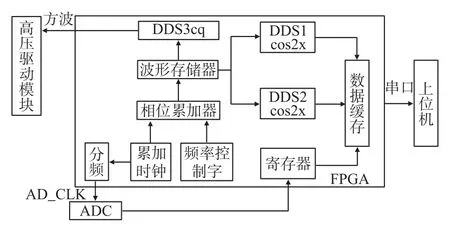
图2 系统硬件设计原理图
在同一FPGA内使用DDS技术,利用同一频率控制字,控制产生PEM的驱动信号和数字锁相的参考信号,使驱动信号和参考信号在同源的基础上实现了频率的一致性,克服了二者的不一致性所造成的相位相对不稳定。由FPGA在同一参考时钟下,分频产生AD的采集时钟,从而既保证了模拟信号和参考信号的相对相位的稳定,又保证了AD在模拟信号每周期内所采的点数与FPGA的ROM内存的点数相同。将采集回来的二倍频谐波分量放到FPGA中寄存,与通过DDS技术产生的参考信号一起传输到LabVIEW进行处理。为了确保弹光晶体工作在谐振状态,参考时钟采用50 MHz,频率控制字设定为27 bit,可得对应的频率分辨率约为0.372 Hz,满足高分辨率的要求。
3 系统软件设计
图3是上位机数据处理的设计流程,启动程序后,LabVIEW通过两路串口设备分别完成对直流序列和交流序列的采集,从第一路串口数据中分离出正余弦参考序列和待测序列,并对其进行互相关函数以及平方和运算,得到二倍频的幅值;结合另一路直流序列,采用式(3)进行数据处理,得到光学旋光角,并实时监控显示信号序列和旋光角。

图3 软件设计流程图
3.1数据采集模块设计
本设计中,通过VISA资源名称控件选择对应的串口设备,通过VISA配置串口对串口进行配置,串口的波特率和下位机保持一致设置为9 600 bit/s,终止符设置为终止状态,防止接收到的数据中包含终止符标识符时误终止串口的配置。之后通过VISA打开、VISA读取、VISA关闭实现对缓存数据的读取,在读取VISA数据之前,设计设备的位属性节点来保证读到已有的所有数据,并通过条件判断确定开始读取的时间。
由于系统的数据来自于硬件采集单元,属于被动地接收数据,串口的缓存区里一直有数据存在,为了保证数据的连续性,使用连接字符串这个函数将缓存数据连接起来,然后接到循环结构的移位寄存器中进行保存,当移位寄存器中的数据量达到一定时或满足数据处理的条件时,才停止这个循环,输出读取到的数据。本设计中,由于每帧有196个数据,每个数据都是由8 bit的十六进制数组成,为了保证采集到的数据包含完整的一帧待测序列,每次循环缓存两帧数据,共196×2=392 byte,所以当缓存的字节数大于392时,退出while循环,才能满足数据连续性的处理要求。此外,由于串口是底层硬件,数据从软件到串口需要耗时,接着仪器对指令作出响应也要耗时,而软件运行两个节点的时间要小于这些时间的总和,所以循环设置了10 ms的延时。程序设计如图4(a)所示。

图4 程序框图
3.2数据处理模块设计
下位机传输过来的一帧完整的数据包括正弦参考序列、余弦参考序列和待测信号序列,它们都是由64个8 bit的十六进制数组成,再加上保证数据完整性的帧头标示符Aa和帧尾标示符Dd,每帧包含196个数据。数据解调主要是从下位机传递给PC机的数据中,通过帧检测的方式找到一帧完整的数据,把数字锁相的参考序列和待测序列分别放在不同的数组中,之后传递到数字锁相模块进行处理,最终提取出所需的二倍频幅值。该模块主要包括帧头、帧尾的查找模块,数字锁相解调模块。
3.2.1帧检测模块
串口读取函数在缓冲区读取的数据都是字符串格式,首先需要通过字符串至字节数组转换函数将数据转换成字节数组,然后采用四个并列的搜索一维数组函数对数组进行搜索,并根据两个帧头元素A和a,两个帧尾元素D和d索引的相对位置判断是否找到一帧完整的数据,搜索过程采用移位寄存器对数组中的元素进行逐位查找,防止发生遗漏,找到帧头帧尾标示符后退出while循环进入数字锁相模块,否则退出本次数据处理,开始对串口缓存的下一帧数据进行查找,这样的设置可以防止while循环变成死循环。设计程序框图如图4(b)所示。
3.2.2数字锁相模块
在数字锁相条件结构中,首先通过获取数组子集函数分别将正弦参考序列、余弦参考序列、待测序列放在三个数组中,然后根据前文所述的数字锁相原理,利用LabVIEW提供的互相关运算函数,分别用正弦参考序列和余弦参考序列与待测序列求互相关函数得到式(5)中的和式(6)中的,根据式(7)对两个互相关函数进行运算,即可得到二倍频的电压幅值,将其与前述的通过另一路串口配置函数采集到的直流序列进行运算,最终得到光学旋光角。运算程序如图5所示。

图5 数字锁相程序
4 实验验证及分析
在实验中,上位机经过信号采集模块接收到的信号序列如图6所示,其中,图6(a)中曲线1是平均值为VDC=4.52 V的直流序列,曲线2和曲线3分别为从下位机信号中提取出的幅值为V=1 V二倍频余弦、正弦参考序列。由于下位机AD的采样速率是3.2 MHz,参考信号的频率是100 kHz,可得正余弦参考的采样率为1/32 Hz,即采集到的序列周期为32 s,可见上位机信号采集程序实现了对参考序列的完整解调。图6(b)为待测序列的实时显示,其采样周期是32 s,符合与参考序列频率相同的设计要求。对参考序列和待测序列经过前述的锁相计算,得到待测序列二次谐波分量的幅值为V2f=0.52 V,带入式(3)得到待测旋光角为θ=8.52×10-5rad。

图6 信号序列实时显示
对于某一旋光角度固定的样品,每隔五分钟进行一次测量,所得结果如图7所示,计算得标准偏差为σ=1.48×10-6rad,满足高稳定度的实时测量要求。

图7 旋光角测量曲线
5 结论
本文对PEM测量旋光角度的原理进行分析,结合双通道数字相关解调算法,设计了软硬件相互协调的信号解调系统。对现有的旋光数据处理方法进行了扩展和改进,通过PEM技术获取微弱的待测信号,由FPGA提供参考序列,在LabVIEW开发环境下设计并实现图形化的数字锁相解调器。实验表明,在旋光角为8.52×10-5rad时,系统的标准偏差为σ=1.48×10-6rad,可以满足高稳定度的旋光数据处理要求,且系统操作简单、界面直观、开发周期短、成本低,能够为微弱信号解调领域提供参考。
[1] 马丽丽.介质旋光特性的光谱分析法研究[D].曲阜:曲阜师范大学,2013.
[2] 赵世民.旋光物质旋光方向的确定及旋光度测算[J].实验室研究与探索,2012,31(10):22-25.
[3] Modine F A,Major R W,Sonder E.High Frequency Polarization Modulation Method for Measuring Birefringence[J].Applied Optics,1975,14(3):761-764.
[4] 李克武,王志斌,陈友华,等.基于弹光调制的高灵敏旋光测量[J].物理学报,2015,64(18):293-298.
[5] 杜鹏飞.弹光调制干涉信号的高速数据处理系统设计与实现[D].太原:中北大学,2015.
[6] 王志斌,张瑞,赵冬娥,等.光弹调制差频偏振测量及误差分析[J].光学精密工程,2013,21(4):876-883.
[7] 程万前.ARM主控型锁相放大器的研究[D].北京:中国科学院大学,2014.
[8] 秦聚超,姜弢.基于HMC703锁相环的X波段线性扫频源设计与实现[J].电子器件,2013,36(6):820-824.
[9] 翟冰.基于DSP的正交锁相放大器研制及其红外气体检测应用[D].吉林:吉林大学,2015.
[10]黄兆翔,单鸿涛,江子杰,等.基于DSP的逆变器锁相技术研究[J].装备维修技术,2014,15(4):13-16.
[11]黄增跃,姬军,王云龙,等.呼吸感应体积描记系统中弱信号锁相放大模块的设计[J].传感技术学报,2014,27(1):17-20.
[12]张晓鹏,董明利,刘锋,等.基于多级衍射及自适应补偿的光纤光栅传感器解调技术[J].传感技术学报,2015,28(3):330-335.
[13]赵星,李小霞,李勇.基于FPGA的锁相放大器在多组分气体检测中的应用[J].电脑知识与技术,2014,34(10):8184-8185.
[14]Ye Yu,Yangan Zhang,Xueguang Yuan.A LabVIEW-Based Real-Time Measurement System For Polarization Detection and Calibration[J].Optik-International Journal for Light and Electron Optics,2013:2256-2260.
[15]许文佳.基于FPGA的数字锁相放大器的研究[D].吉林:吉林大学,2012.

刘顺(1991-),女,汉族,山西忻州人,硕士研究生,研究方向为FPGA应用,上位机控制,光电检测,liushun_ls@yeah.net;

李晓(1972-),女,山西运城人,副教授,博士,硕士研究生导师,主要从事光电信息检测、电气控制等方面的研究工作,lixiaoydx@163.com。
Signal Demodulation System Based on Measurement of Optical RotationUsing Photo-Elastic Modulation*
LIU Shun1,2,LI Xiao1,2*,WANG Zhibin1,LU Runfa1,LI Kewu1,JING Ning1,WU Xianghui2
(1.Engineering and Technology Research Center of Shanxi Province for Optical-Electric Information and Instrument,Taiyuan 030051,China;2.School of Computer and Control Engineering,North University of China,Taiyuan Shanxi 030051,China)
Taking the high sensitivity and high precision of measurment of optical rotationusing photo-elastic modulation into account,and in order to realize the real-time and stability measurement of optical rotation angle,an PEM-based optical rotation angle data demodulation system is designed.We used the multi-channel direct digital synthesis technology of FPGA to control the driving signal of PEM and frequency-doubled reference signal of digital lock-in amplifier through the same frequency control word,so the same frequency and homology of signals can be ensured in this way.AC and DC sequences are transmitted to the PC via the two-way serial port equipment,it contains reference signal and test signal in the AC sequence,LabVIEW achieve port resource allocation and data cache,find a frame of data through frame detection module,then conduct digital lock-in demodulation of these data,and output the optical rotation and display the sequence waveform in the final.Experiments show that when the rotation angle is 8.52×10-5rad,the standard deviation of system is 1.48×10-6rad.
digital demodulation;lock-in amplifier;photo-elastic modulation;labview
TP311
A
1004-1699(2016)07-1021-05
项目来源:国际科技合作项目(2013DFR10150,2012DFA10680);国家自然科学基金仪器专项(61127015);山西省青年科技研究基金(2014021012)
2016-01-18修改日期:2016-02-02
猜你喜欢
科技风(2019年35期)2019-01-03
雷达学报(2018年1期)2018-04-04
质量技术监督研究(2018年1期)2018-03-26
光学精密工程(2016年2期)2016-11-07
光学精密工程(2016年2期)2016-11-07
电测与仪表(2016年6期)2016-04-11
中国光学(2015年5期)2015-12-09
遥测遥控(2015年2期)2015-04-23
电测与仪表(2015年8期)2015-04-09
物理实验(2015年9期)2015-02-28
