
基于容积卡尔曼滤波的异类多传感器一致性融合算法*
2016-10-17 07:27金长江曹祥杰
传感技术学报 2016年7期
金长江,张 兵,曹祥杰
(中国电子科技集团公司第二十七研究所,郑州450047)
基于容积卡尔曼滤波的异类多传感器一致性融合算法*
金长江*,张兵,曹祥杰
(中国电子科技集团公司第二十七研究所,郑州450047)
针对单一光频传感器获取目标特征信息存在的不一致性,提出一种基于容积卡尔曼滤波的异类多传感器一致性融合方法。首先,从原理上分析了激光、红外与雷达三类传感器量测信息的特征及其存在的差异,进而在容积卡尔曼滤波框架下,针对雷达、红外和激光探测等组成的典型目标侦测系统,结合一致性融合策略,通过对目标距离和方位信息融合处理改善目标状态估计精度。仿真结果表明:相对于传统的单传感器滤波方法,所提出的融合方法和策略具有较好的滤波性能。
非线性滤波;异类多传感器;容积卡尔曼滤波;一致性融合
EEACC:7230doi:10.3969/j.issn.1004-1699.2016.07.010
现代战争的战场环境日趋复杂化,为了提高目标的探测准确度和预警的置信度,基于信息融合技术将几种光电传感器的探测数据进行有效融合已经成为光电传感器信息处理的研究热点。依据融合系统中采用传感器类型不同,可将其分为同质传感器数据融合与异类多传感器数据融合两大类[1-2]。较之于同质传感器数据融合,异类多传感器数据融合可以更加充分发挥其应用环境及性能的互补作用,获得更高估计精度。文献[3-5]将雷达、红外和激光的异类多传感器融合系统引入到目标跟踪领域,并验证了系统的有效性。雷达[6]可以提供目标完整的位置与角度信息,但因存在低空盲区、易受电子干扰和电磁波辐射功率较大等缺点,使其在应用中受到种种限制。比较而言,红外传感器[7]由于不向空中辐射能量,因而不易暴露。但是,红外传感器探测机理使得其存在作用距离近、无法获得目标径向距信息等缺点。另外,激光探测具有高方向性、高单色性和高亮度等特点,使其可以实现无接触远距离测量。然而,激光探测在拥挤环境下因其利用了跟踪目标的运动信息,使之很容易造成错误的数据关联。
另外,机动目标跟踪的精度及稳定性与其采用滤波算法是紧密相关的。目前广泛采用的非线性滤波方法[8-9]主要有扩展卡尔曼滤波(EKF)、不敏卡尔曼滤波(UKF)、粒子滤波(PF)以及一系列相关的改良方法。其中,EKF[10]利用泰勒展开的一次项对非线性方程作线性化处理,算法简单,易于实现,但在强非线性和非高斯环境下跟踪性能较差,甚至会出现滤波发散现象;UKF[11]用一组精心选择的sigma点经过UT变换来传递随机变量的统计特性,其优点在于UKF对被估计系统非线性强度不敏感,然而,UKF要求必须选择合适的参数,才能达到较好的滤波效果;PF[12]采用的是空间随机样本,它独立于系统的模型,可应用在各种系统模型下。但是其实现机理使之无法克服粒子退化和粒子多样性溃退问题。另外,随着粒子数目增多,PF计算量会呈指数增加,造成算法实时性降低。为解决非线性滤波精度与计算复杂度上的矛盾,Arasaratnam等率先提出采用三阶容积法则的数值积分近似加权高斯积分的思想,提出了容积卡尔曼滤波(CKF)[13-14]。在国内,对于CKF和异类传感器融合的研究也取得了部分成果。Huang等提出了基于CKF的单雷达、单红外传感器结合的空间校准方法,并验证了其优越性[15];Li等结合量测融合技术与CKF算法,提出实现无线环境下同质移动传感器的跟踪[16]。
基于以上分析,本文从几种传感器信息获取的一致性性入手,分析几种传感器的工作体制及其在使用中存在的差异,结合雷达、红外传感器和激光探测的实现机理,在容积卡尔曼滤波(CKF)的框架下,给出了一种基于容积卡尔曼滤波的异类多传感器一致性融合方法。通过算法描述和仿真分析,本文所提算法明显提高了对目标探测的空间分辨力。
1 问题描述
考虑如下具有加性噪声的多传感器离散系统方程

式中,xk和zk,m分别表示k时刻目标的状态向量和量测向量;和分别为系统状态转移函数和量测函数;Γk表示过程噪声分布矩阵;uk和vk,m分别表示过程噪声和量测噪声;m表示量测系统中的传感器标号;M表示量测系统中雷达传感器、红外传感器和激光探测传感器总数目。


2 容积卡尔曼滤波算法
容积卡尔曼滤波(CKF)算法实现的核心思想是采用三阶球面-相径容积规则近似非线性函数传递的后验均值和协方差,CKF算法是从数值积分的角度来进行近似高斯积分,更加直观。标准CKF算法计算流程如下:
步骤1 时间更新
设k-1时刻协方差矩阵Pk-1|k-1正定,对其进行因式分解得到Sk-1|k-1,即

容积点估计

其中,ξi表示第 i个容积点,且i=1,2,…,N,此时,N表示容积点数目,N=2n,n表示被估计系统状态向量维数;表示矩阵矩阵的第i列元素,In×n表示 n维单位矩阵。
容积点传播

求解状态一步预测值

计算预测误差协方差矩阵
其中,Qk-1表示系统噪声协方差矩阵。
步骤2 量测更新
矩阵Pk|k-1因式分解

容积点估计

容积点传播

计算量测预测值



3 基于CKF的异类多传感器一致性融合算法
作为目标跟踪系统中被动探测的重要工具,红外传感器和激光探测传感器虽然能够获得优于雷达量测的目标方位角信息和径向距信息,但红外传感器自身探测机理使得其无法提供目标的径向距信息,另外激光传感器无法提供目标的方位角信息,因而单独利用红外传感器或激光传探测感器构成目标量测系统在结构上属于不可观系统。同时,针对异类多传感器量测的有效融合问题,一个直观的解决方法就是减少量测融合过程中对于量测噪声统计信息的依赖,并尽可能提取和利用量测间自身蕴含的冗余和互补信息。基于以上分析,通过构建表征异类多传感器量测间数据相互支持程度信息的一致性距离和一致性矩阵,合理配置量测在量测融合过程中的权重,以实现量测在数据融合过程中的有效利用,在此基础上,设计了基于CKF的异类多传感器一致性融合算法(CKF-C)。
3.1一致性融合方法
针对多传感器量测系统的结构特点,首先,考虑到多传感器量测数据间相互支持程度的度量,定义置信距离

其中,α=1,2,…,M,β=1,2,…,M;且值越大表明两虚拟量测间的差别越大,即zk,α和zk,β之间相互支持程度就越弱。置信距离的定义以现有数据隐含信息为基础,降低了对先验信息的要求。为了对多传感器量测间的相互支持度进行规范性量化,定义一致性距离如下



由于λk为一不等于零的实常数,则;且由于和成正比,对中的元素进行归一化处理得到,此时表示在实现一致性融合过程所具有的权重。即



3.2CKF-C
在CKF框架下,结合基于一致性融合的异类多传感器滤波方法,通过划分异类多传感器量测权重,实现对于异类多传感器量测中冗余和互补信息的合理利用,进而改善标准CKF框架下单一雷达、红外和激光探测传感器量测的一致性偏差对滤波精度的影响。为便于理解CKF-C的具体操作,下面给出CKF-C的实现步骤。
Step 1量测一致化:
根据公式(20~24),求解每个传感器量测在融合处理中的权重
Step 2时间更新:
Step 3量测更新:
由公式(11~19)求解增益Kk,并计算状态估计及其误差协方差矩阵Pk|k。
4 仿真分析
4.1仿真实验环境
实验场景设定目标在X-Y平面上做匀速直线运动,量测系统采用2部雷达传感器、2部红外传感器和2部激光主动探测设备实现对目标的观测。依据运动目标的动力学原理,目标运动的状态方程为


其中

式中,S、W和J分别代表雷达、红外和激光主动探测设备的数目。xk和yk分别表示目标在笛卡尔坐标系中水平方向和垂直方向上的坐标位置;vk,m为高斯分布的量测噪声向量。雷达传感器的量测噪声协方差矩阵和分别为
diag([0.12,(0.025×pi/180)2])和 diag([0.082,(0.019×pi/180)2]);红外传感器的量测噪声协方差矩阵和分别为(0.012×pi/180)2和(0.009× pi/180)2;激光传感器的量测噪声协方差矩阵和分别为0.072和0.052。红外传感器和激光传感器相互缺少的信息可由其相互补充,构成新的量测噪声协方差矩阵。
4.2仿真结果与分析
为验证算法的可行性和有效性,以下给出异类多传感器前提下Monte Carlo仿真算例,取Monte Carlo次数为200,并以均方根误差(RMSE)作为衡量算法精度优劣的性能指标。目标在k时刻的初始状态向量记为xk=[xx˙yy˙]T,其中x和x˙分别表示目标在X轴方向的初始位置和速度,y和y˙分别表示目标在Y轴方向的初始位置和速度。目标初始状态设定为x0=[15 km0.4 km/s10 km0.3 km/s]T。采用雷达传感器1(CKF-R1)、雷达传感器2(CKF-R2)、红外激光混合传感器1(CKF-IL1)、红外激光混合传感器2(CKF-IL2)和三种传感器一致性融合(CKF-C)分别进行滤波估计,采样次数为30。水平和垂直方向上位置估计的RMSE结果如图1和图2所示。

图1 水平位置状态估计

图2 垂直位置状态估计
由图1和图2可以清晰看出,本文融合算法估计精度明显高于利用单类型传感器量测和两种类型传感器的滤波估计精度。上述结果意义在于能够指导我们在工程应用中结合具体性能指标恰当选取融合方法的实现结构形式。结合三类传感器的量测数据,基于200次Monte Carlo仿真实验获得水平方向和垂直方向位置、速度估计的RMSE,并将其所有时刻RMSE均值与基于单雷达传感器量测和红外激光混合传感器量测的CKF位置、速度估计RMSE均值对比,实验结果见表1。
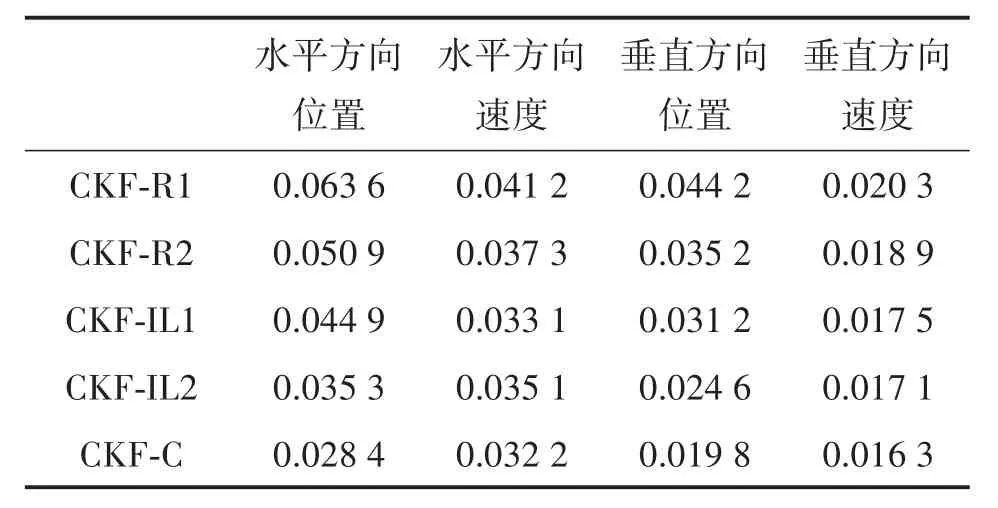
表1 位置估计与速度估计的RMSE均值比较
由表1可以看出,红外激光混合传感器在水平方向位置、速度和垂直方向位置、速度的滤波精度要明显高于采用单雷达传感器的滤波精度。其原因是红外传感器对于方位角量测信息的测量要优于雷达传感器,激光探测对于径向距量测信息的测量要优于雷达传感器,所以其混合传感器的滤波精度比采用单雷达传感器的滤波精度高。另外,本文所提算法在水平方向位置、速度,垂直方向位置、速度上的滤波精度均优于单雷达和红外激光混合传感器。分析其原因在于CKF-C通过对异类多传感器量测数据之间相互支持程度的度量实现量测融合中权重的评估,避免了对量测先验信息的依赖,这种对于数据的处理机制改善了滤波估计精度。
5 结论
融合雷达、红外与激光三类异类多传感器量测信息能够提高目标状态估计的可靠性和稳定性。本文提出一种基于CKF的异类多多传感器一致性融合算法,采用一致性融合方法计算权重,并进行最优加权获得三种传感器的融合方位角量测信息以及径向距量测信息,并基于信息融合结果,通过CKF算法对机动目标进行跟踪,提高了系统的鲁棒性和状态估计精度。仿真实验采用两部雷达、两部红外传感器和两部激光主动探测设备进行目标探测,结果表明:相对于传统单雷达传感器或红外激光混合传感器,所提出的融合方法和策略具有较好的滤波性能及识别精度,可以提高对目标航迹检测的准确度。
[1] Mahler R P S.Statistical Multisource-Multitarget Information Fusion[M].Boston,London:Artech House Publishers,2007:24-35.
[2] 王华东,王大羽.一种改进的多无线传感器数据分批估计自适应加权融合算法[J].传感技术学报,2015,28(8):1239-1243. Wang H D,Wang D Y.An Improved Multiple Wireless Sensor Data Batch Estimation Adaptive Weighted Fusion Algorithm[J].Chinese Journal of Sensors and Actuators,2015(8):1239-1243.
[3] Rao M K,Goh C C.A Low-Cost Near-IR Laser Radar[J].Photonics Technology Letters IEEE,1990,2(9):683-685.
[4] 胡振涛,曹志伟,李松,等.基于容积卡尔曼滤波的异类多传感器融合算法[J].光电子:激光,2014,25(4):697-703. Hu Z T,Cao Z W,Li S,et al.Heterogeneous Multi-Sensor Fusion Algorithm Based on Cubature Kalman Filter[J].Journal of Optoelectronics:Laser,2014,25(4):697-703.
[5] 郑红,郑晨,闫秀生,等.基于SUKF与SIFT特征的红外目标跟踪算法研究[J].光电子:激光,2012,23(4):791-797. Zheng H,Zheng C,Yan X S,et al.Research on Infrared Object Tracking Based in SUKF and SIFT[J].Journal of Optoelectronics:Laser,2012,23(4):791-797.
[6] Davidson G,Symons S,Everett M.Sensor Fusion System for Infra-Red and Radar[C]//The IEE Seminar on Signal Processing Solutions for Homeland Security.IET Digital Library,2005:4-4.
[7] Chen H,Rong J.A Multitarget Tracking Algorithm Based on Radar and Infrared Sensor Data Fusion[C]//Communication Software and Networks(ICCSN),2011 IEEE 3rd International Conference on.IEEE,2011:367-371.
[8] Simon D.Kalman Filtering with State Constraints:a Survey of Linear and Nonlinear Algorithms[J].IET Control Theory&Applications,2010,4(8):1303-1318.
[9] 韩崇昭,朱红艳,段战胜.多源信息融合[M].北京:清华大学出版社,2010. Han C Z,Zhu H Y,Duan Z S.Multi-Source Information Fusion[M].Beijing:Science Press,2010.
[10]Gustafsson F,Hendeby G.Some Relations Between Extended and Unscented Kalman Filters[J].IEEE Transactions on Signal Processing,2012,60(2):545-555.
[11]Julier S J,Uhlmann J K.Unscented Filtering and Nonlinear Estimation[J].Proceedings of the IEEE,2004,92(3):401-422.
[12]Hu Z T,Liu X X,Hu Y M.Particle Filter Based on the Lifting Scheme of Observations[J].IET Radar,Sonar and Navigation,2015,9(1):48-54.
[13]Arasaratnam I,Haykin S,Hurd T R.Cubature Kalman Filtering for Continuous-Discrete Systems:Theory and Simulations[J].IEEE Transactions on Signal Processing,2010,58(10):4977-4993.
[14]杨理践,李晖,周福宁,等.基于容积卡尔曼平滑滤波的管道缺陷定位技术[J].传感技术学报,2015,28(4):591-597. Yang L J,Li H,Zhou F N,et al.The Pipeline Defect Location Technology Based on Cubature Kalman Smooth Filter[J].Chinese Journal of Sensors and Actuators,2015,28(4):591-597.
[15]Jianjun H,Jiali Z,Feng J.A CKF Based Spatial Alignment of Radar and Infrared Sensors[C]//Signal Processing(ICSP),IEEE 10th International Conference on Signal Processing.2010:2386-2390.
[16]Li W,Jia Y.Location of Mobile Station with Maneuvers Using an IMM-Based Cubature Kalman Filter[J].IEEE Transactions on Industrial Electronics,2012,59(11):4338-4348.

金长江(1983-),男,河南郑州人,工程师,主要从事光电探测技术和光电信息处理技术的研究,参与和主持了多项863课题、型号研制和国防预研课题,发表多篇学术论文,hityangtse@163.com。
Heterogeneous Multi-Sensor Consistency Fusion Algorithm Based on Cubature Kalman Filter*
JIN Changjiang*,ZHANG Bin,CAO Xiangjie
(The 27th Research Institute of China Electronic Technology Corporation,Zhengzhou 450047,China)
Aiming at the inconsistency of target feature information obtained form single optical frequency sensor,a novel heterogeneous multi-sensor consistency fusion algorithm based on cubature Kalman filter is proposed.Firstly,the characteristics and differences of measurement information from three kinds of typical sensors including laser,infrared and radar are discussed in theoretical.Secondly,for the typical target reconnaissance system under the framework of Cubature Kalman filter,combining with consistency fusion strategy,the target state estimation filtering is improved by fusion processing of distance and azimuth information.Finally,the target state information after fusing was acquired.The simulation results show that the proposed algorithm can obtain better filtering performance relative to the traditional single sensor filtering method.
nonlinear filter;heterogeneous multi-sensor fusion;cubature kalman filter;consistency fusion
TP393
A
1004-1699(2016)07-1006-05
项目来源:863计划基金项目(2015AA8098089A)
2016-01-10修改日期:2016-03-06
猜你喜欢
小学生学习指导(高年级)(2022年4期)2022-04-26
测控技术(2018年12期)2018-11-25
北京航空航天大学学报(2017年9期)2017-12-18
读写算·高年级(2017年6期)2017-06-27
系统工程与电子技术(2016年2期)2016-04-16
癌症进展(2016年10期)2016-03-20
电源技术(2016年9期)2016-02-27
儿童故事画报·智力大王(2015年12期)2016-01-23
儿童故事画报·智力大王(2015年9期)2016-01-03
儿童故事画报·智力大王(2015年6期)2015-08-17
