
基于FPSO的船舶柴油发电机励磁系统控制
2016-10-13 11:42:22陈勇,张艳
船电技术 2016年9期
陈 勇,张 艳
基于FPSO的船舶柴油发电机励磁系统控制
陈 勇,张 艳
(上海海事大学电气自动化系,上海201306)
针对大功率船舶柴油发电机工况的复杂性、时变性以及非线性等特性,以及船舶运行负载的变化对发电机励磁系统的影响,借鉴粒子群优化算法能够很好地适应复杂系统参数的寻优的特性以及模糊控制对参数优化的精确性,使用粒子群优化算法对控制器的PID参数进行优化,再使用模糊PID算法以误差和误差变化率作为输入,PID参数的增量作为输出对粒子群优化算法优化出来的PID参数进行修正,构成船舶发电机模糊-粒子群优化(FPSO)励磁控制系统控制器。在Matlab/Simuink环境下进行了额定负载、增加50%额定负载和三相故障等工况的仿真实验。实验表明,端电压经过短暂的波动后能够快速的回归稳定,证明该方法能够很好地适应工况的改变。
柴油发电机 励磁控制 PID控制器 粒子群优化算法 模糊控制
0 引言
柴油发电机是船舶电力系统主要的电力来源。同陆地上的电力系统相比,船舶电力系统具有多台柴油发电机、负载种类多,工况较复杂等特点[1]。船舶上负载的变动会造成功率因数的改变,进而会引起电力系统发电机端电压的波动,船舶发电机励磁系统作为船舶电力系统的重要组成层部分,它的主要功能就是保证船舶发电机端电压恒定、合理分配发电机各机组无功功率、提高电力系统有功功率的传输能力、维持电力系统的动态稳定与暂态稳定[2]。因此,拥有一个可靠性高、性能优良、稳定性好的励磁控制系统对船舶安全运行尤其重要。
励磁控制方法的发展经历了线性变量控制、非线性变量控制及智能控制等多个发展阶段[3]。对于船舶电力系统励磁系统这种具有高度时变性和非线性特性的被控对象,传统的PID控制已经不能够满足励磁系统控制的需要。许多专家学者提出了一系列的改进措施。陈子顺运用了CMAC神经网络并行控制发电机励磁系统[4,5]。欧阳松使用了模糊PID控制发电机励磁系统[6]。杨美艳应用了改进型粒子群模糊神经网络整定发电机励磁系统参数[7]。这些方法在船舶电力系统励磁系统的控制中取得了不错的效果。
2.2对两组患者治疗后不良反应发生情况进行对比,结果显示,观察组不良反应发生率为12.19%,对照组不良反应发生率为36.58%,两组患者组间差异显著,具有差异统计学意义(p<0.05),具体情况如表2所示:
粒子群优化算法是群智能算法中的一种,能够很好地适应于复杂系统参数的寻优,但是,粒子群优化算法可能会陷入局部最优,存在早熟和收敛性比较差的缺点。本文从模糊控制理论以及粒子群优化算法出发,结合各自的优点,在simulink中搭建船舶柴油发电机励磁系统控制器仿真模型的基础上,结合粒子群优化算法复杂系统寻优的快速性以及模糊控制对参数优化的精确性,使用粒子群优化算法对控制器的PID参数进行优化,再使用模糊PID算法根据输入的误差和误差变化率输出对粒子群优化算法优化出来的PID参数进行修正,构成模糊-粒子群(FPSO)控制算法,详细的说明了控制器的设计以及实现方法,并在不同的工况情况下检测励磁系统的控制效果。研究发现,FPSO控制器超调较小,调节时间较快,可以满足船舶在不同工况下的端电压稳定的条件,具有很好的控制效果。
工业控制系统是集计算机技术和网络通信技术相结合的各种自动化系统的统称,用于实现工业生产的数据采集、过程控制、程序控制、图形显示等,如分散控制系统(DCS)、数据采集与监控系统(SCADA)、可编程控制器(PLC)等。
1 船舶柴油发电机励磁控制系统模型
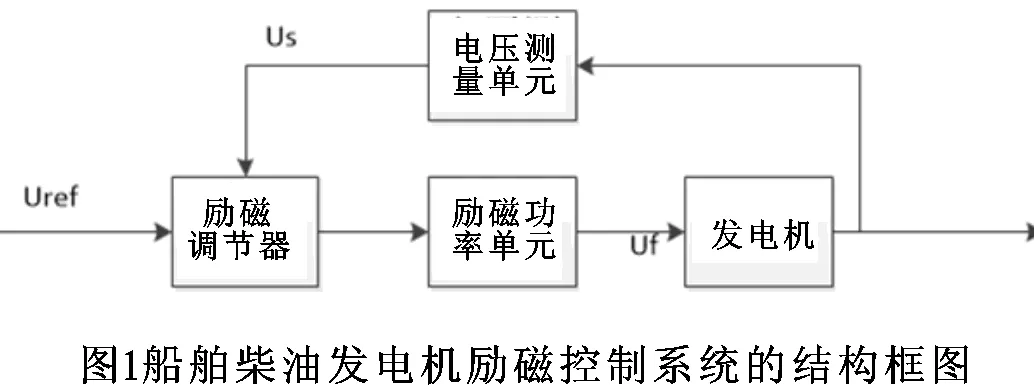
船舶柴油发电机主要由原动机、调速器、发电机等装置组成。船舶柴油发电机的控制系统由转速和励磁两个闭环控制系统组成[5]。船舶柴油发电机励磁控制系统的结构框图如图1所示。图中输入为船舶柴油发电机端电压的标幺值,是通过励磁功率单元输出的发电机励磁电压,是电压测量单元检测到的发电机端电压。端电压的设定值和实际值相减,产生电压误差,通过励磁调节器对励磁功率单元执行器进行调节实现励磁控制作用。系统主要控制对象是柴油发电机以及励磁机,工况的变换主要由三相电力负载决定。
我至今都搞不清楚,小六子这小家伙当时不知哪来那么大的力气。他还没有等我把东西放在炕上,他甚至没等我有任何条件反射的情况下,就抡起他父亲的那根镐柄……
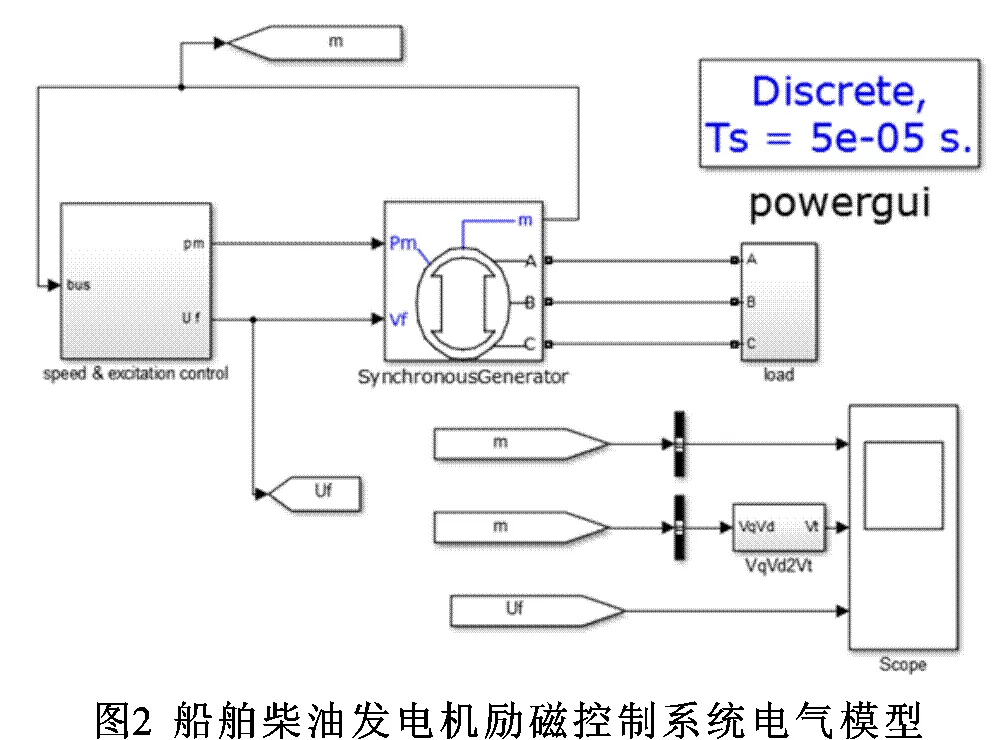
励磁控制系统模型的输入为检测到的端电压值与给定的参考值,输出为柴油发电机的励磁电压。本文将电压比较单元、滞后与超前补偿器、励磁机适当简化,用数学模型表示,简化后的船舶柴油发电机励磁控制系统电气模型如图2所示。控制系统模型由柴油机励磁控制系统模块、柴油机转速控制系统模块、柴油发电机以及负载故障模块组成,其中发电机为Matlab/Simulink中SimPowerSystems中的同步发电机模块,选用的参数为系统自带的发电机参数。
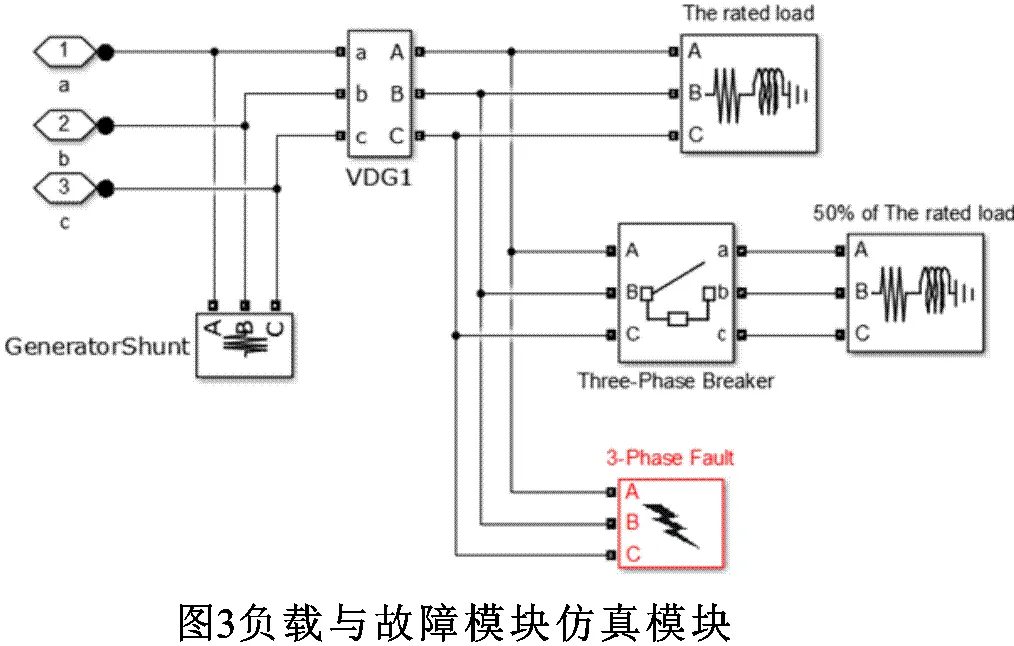
负载故障模块(load)包括额定负载、50%负载以及三相短路故障模拟模块,将三相短路故障模拟模块接入控制系统任何部位就可以进行故障仿真实验,负载与故障模块电气图如图3所示。
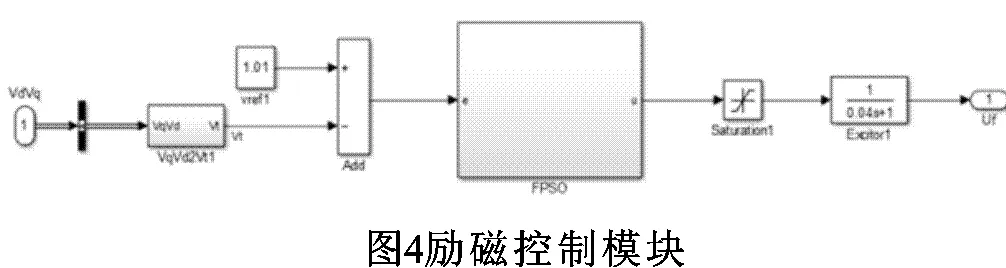
1.2 励磁控制系统仿真模型
控制模块(speed & excitation control)由速度控制模块和励磁控制模块构成。速度控制模块为Matlab/Simulink中的速度控制模块。
1.1 励磁控制系统
2 FPSO控制器设计
2.1 设计原理
模糊子集为
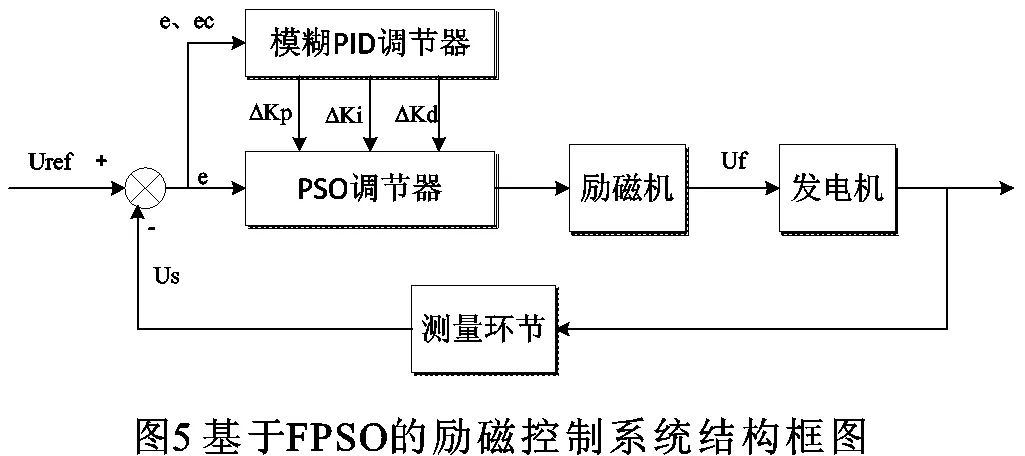
本文设计的控制系统采用将粒子群优化算法与模糊规则相结合的方法,对控制器的PID参数进行自适应调整,结构框图如图5所示。控制系统的工作原理是:将输入变量即端电压误差输入到PSO调节器中,根据系统的模型以及误差的大小对控制器PID参数进行优化,同时将端电压误差以及误差变换率经过模糊化,然后作为输入,输入到模糊PID控制器中,按照给定的模糊规则判断,完成模糊推理,经过去模糊化处理后求得模糊PID控制器的输出控制量。模糊PID控制器的输出量不断地对粒子群优化算法优化得出的PID控制器参数进行修正,从而得到FPSO控制器的控制参数,经过进一步的计算得出励磁控制器的输出控制量,保证柴油发电机端电压的稳定。
2.2基于PSO的PID控制器设计
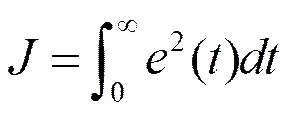
利用粒子群优化算法对PID参数寻优本质上就是基于一个目标函数对参数寻优的问题,粒子的维度为3,即初始化粒子是一个三维向量,分别表示三个参数,粒子在3维空间的位置表示为,粒子的初始位置为,飞行速度表示为,粒子的初始速度为。
式中:()为系统误差。
每个粒子都有一个由目标函数决定的适应度值,并且粒子能够记录自己目前为止发现的最优的位置(pbest)以及现在所在的位置,每个粒子也记录了种群中所有粒子发现的最好的位置(gbest)。粒子通过这些经验决定下一步的动作。粒子通过式(1)(2)来更新自己的速度和位置。
突然想起一句话:围城里面的人想出来,在外边的人想进去。肯定还有很多人会走上教书育人这条路的。他们也会和我一样,在初登讲台的时候,心中装着的是激情,是梦想,后来的故事却不知道是否和我一样。我只能对自己说,如果能有机会,我真想跳出来,如果有来生,下辈子我再也不想做老师……
为获得满意的动态特性,本文选择式(3)所示函数作为优化的目标函数。
有关人士应当明确了解到的是,实验室管理系统是根据相应的实验室数据信息库而建立起来的,同时它的维护管理工作是由实验室管理人员进行管理的,最终使用的平台才能面向于学生。整个实验室管理系统平台,往往可以为学生提供各种不同类型的实验方案器件,学生也可以根据自身的实际需求要自身申请相应的设备,这样一来,由系统依据学生的综合信息来展开实际的分析,从而在数据当中建立出相应的数学模型,最终来批准或是驳回学生的申请。
示范田位于江苏省扬州市广陵区沙头镇新兴村,面积6 670 m2,前茬作物为水稻。土壤为壤土,肥力中等,地势相对平整。防病治虫、施肥等田间管理按常规方法进行。
粒子群优化PID参数的流程图如图6所示。最后的输出结果即为最优的粒子,粒子所携带的参数为三个参数。
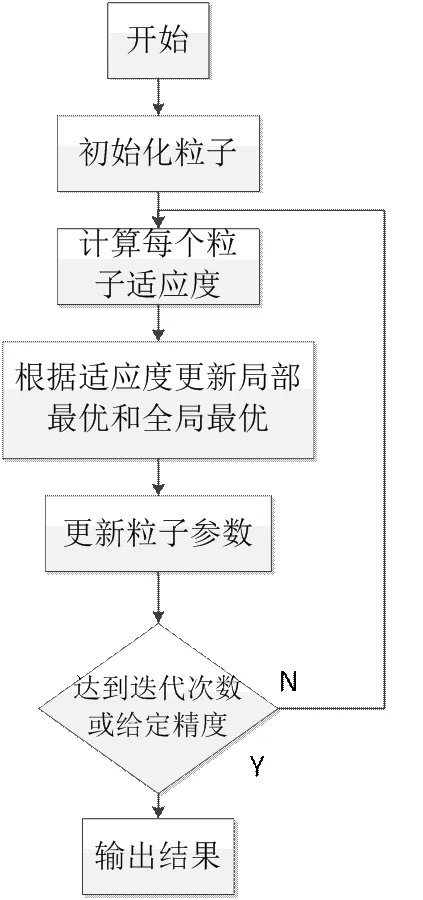
图6. 粒子群优化PID参数的流程图
高校体育教学与专业课的教学存在着各方面较大的不同,但是在体育教学中也按照专业课程教学评价一样进行相应的评价管理,并融入学生评教还是非常有意义的,大体体现在以下两个方面:
模糊PID控制器的输入是误差e和误差变化率ec,输出为PID参数的变化量,根据模糊控制规则对控制器的PID参数进行适时调整、修改,能够满足任何时刻的e和ec对PID自整定参数的要求[8,9]。
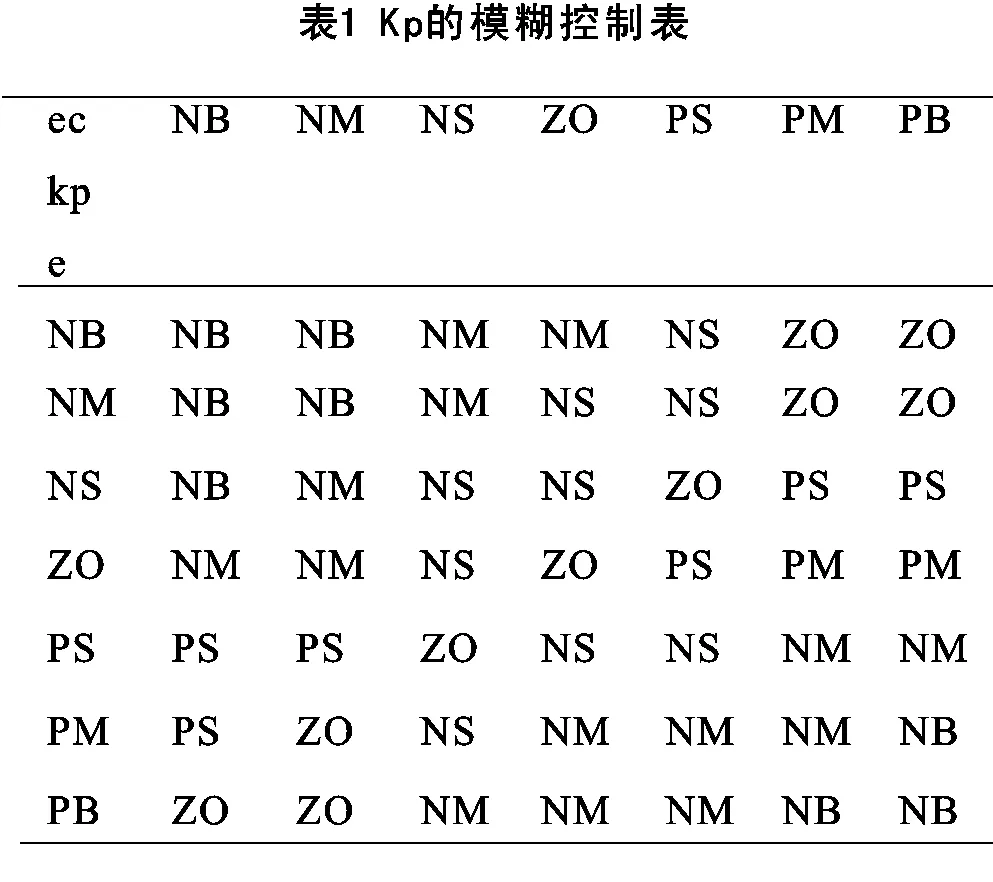
自适应模糊PID控制器是以PID算法为基础,以系统当前的误差e和误差变化率ec作为输入,将输入参数按照一定的量化因子模糊化,根据模糊规则进行模糊推理,通过查询模糊矩阵表并得到的对应的控制结果,再将控制结果解模糊化输出,对PID的参数值进行调整。
模糊集的论域为

高安方言颇具特色。语音上,它保留了古汉语的入声“k”和“t”,如把“百”字读作“pak4”,“八”字读作“pat4”,等等。词汇上,该方言常常给人一种“百姓打官腔”的感觉。“惟愿”、“莫怪”、“作践”、“休命”、“发气”、“静办”、“灵泛”、“伶俐”、“血糊淋剌”等明清文学作品中的词汇,几乎每个高安人,无论其受教育程度如何,都能够为你娓娓道来。正如陈昌仪老师在《赣方言概要》中所言,“……随着(江西)文化教育的发展,知识分子的激增,宋元明官场上和文人中流行的文绉绉的雅语、避讳语也流入了民间,现在成了(江西)广大农村中老年文盲、半文盲的大白话”。[2](P65-67)
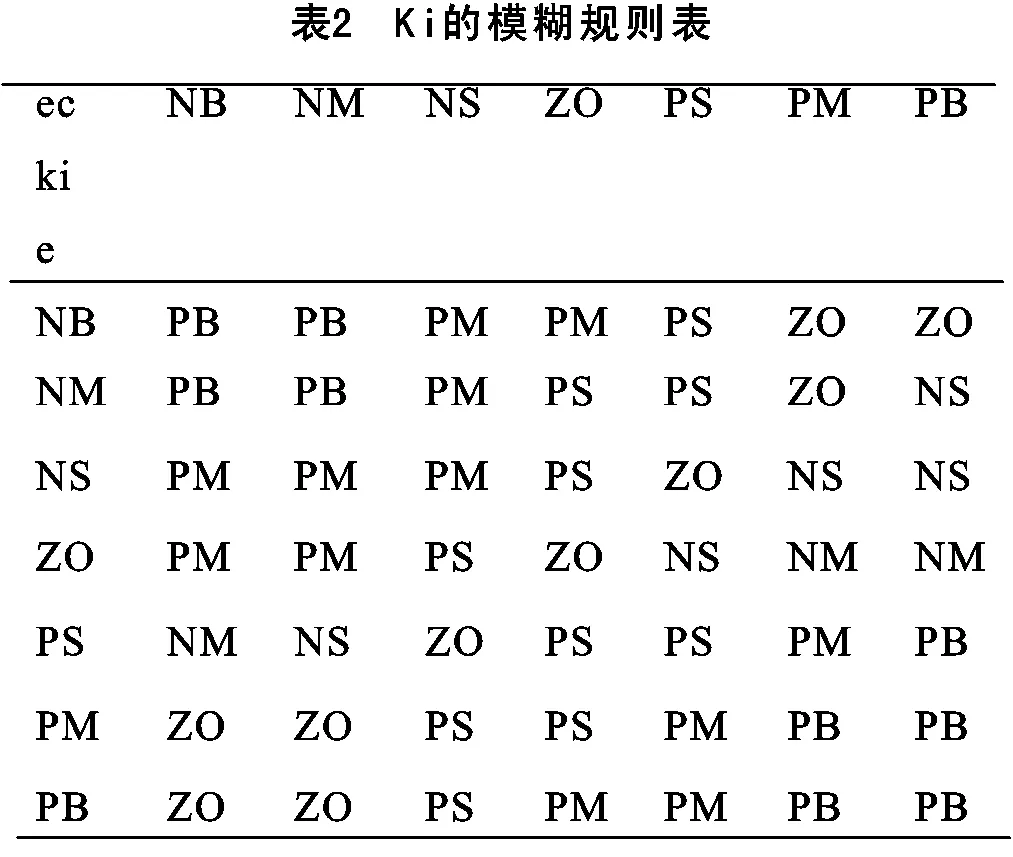
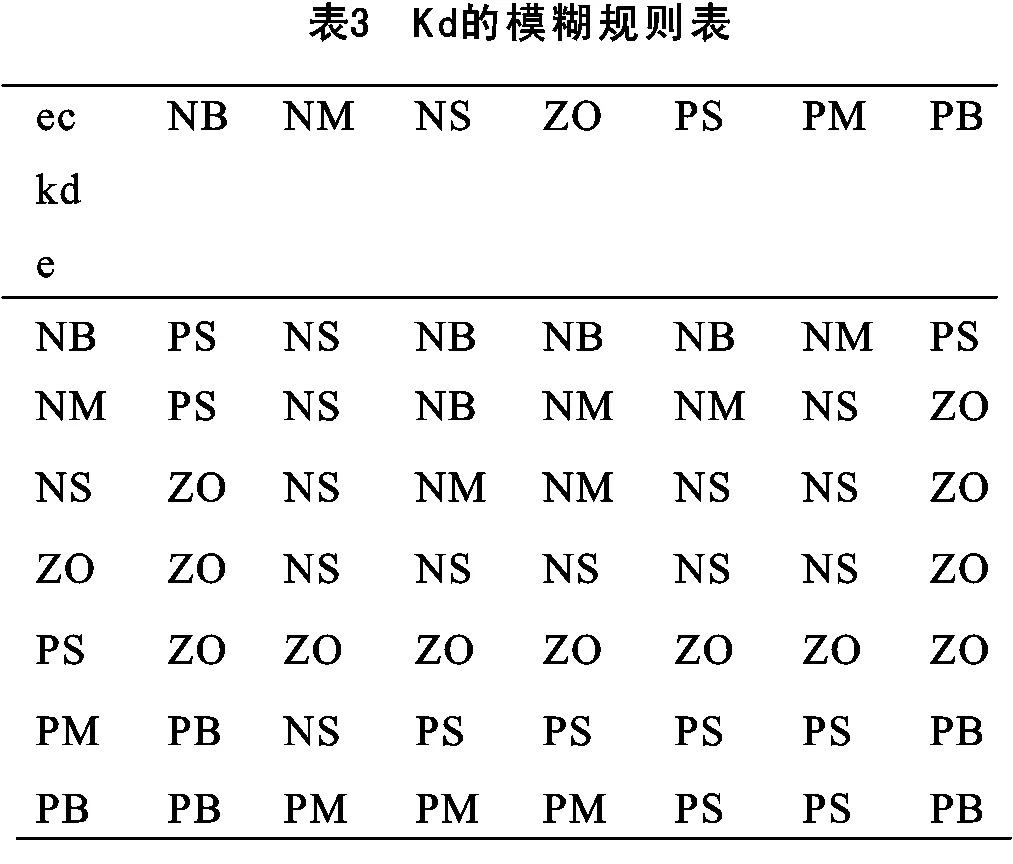
根据经验得出各模糊算子集的隶属度,将得到的隶属度函数离散化,就能够得到相应模糊变量的模糊子集,参考各模糊子集的隶属度赋值表,根据模糊推理进而设计PID参数的模糊矩阵表,计算并修正系统参数。
模糊控制设计的核心是总结前辈们的技术经验,建立恰当的模糊规则表,进而得到针对三个参数的模糊控制表。
3 仿真分析与研究
本文设计了船舶柴油发电机励磁控制器,并在不同工况下分析励磁控制系统的的动态特性。
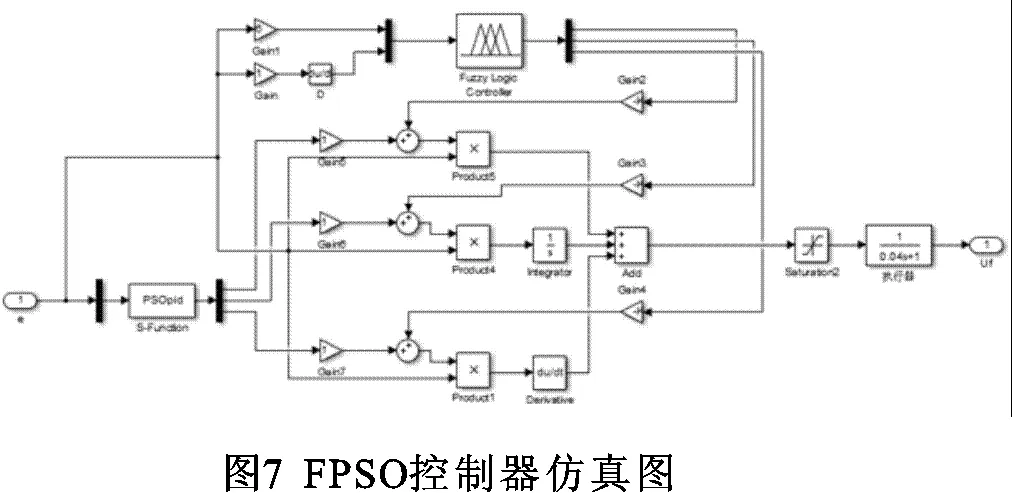
在励磁控制系统以额定负载启动的工况下,比较FPSO控制器与粒子群优化PID控制器的控制效果,输入信号为幅值为1.01。FPSO控制器仿真图如图7所示。
事实上,相比企业而言,国家在上世纪90年代,就把消费者满意度作为一项重要的品牌评价指标,并提出要对其进行重点研究。
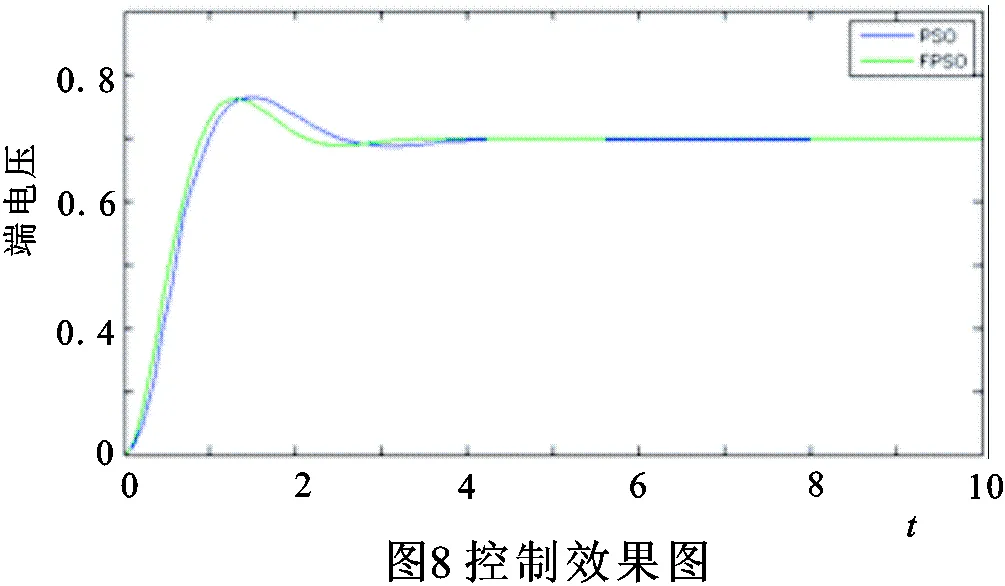
采用PSO控制器,粒子的维度为3,粒子的种群为20,迭代次数为10。所得结果为=50.9115,=0.9487,=5.4694。采用FPSO控制器,所得结果为=56.25,=0.6695,=4.605。控制效果图如图8所示。由图像可知,空载启动时,FPSO与PSO相比,FPSO算法的超调量要比PSO算法得到的超调量小,调节时间FPSO算法要比PSO算法短,FPSO算法要比PSO算法更加稳定,说明FPSO算法的控制效果要比PSO算法的控制效果好。说明FPSO算法与PSO算法相比更适应于发电机励磁控制。
虽然基于KPI的绩效管理具有多种优势,而且在企业中得到大范围应用。比如:在市场行情不佳时,一般为减少库存及减少应收账款的“两金压降”手段设置科学KPI,可以严格控制企业的经营风险,以此高效完成利润总额目标。但是就实施现状来讲,,依旧存在一些不足,主要体现在以下几个方面:
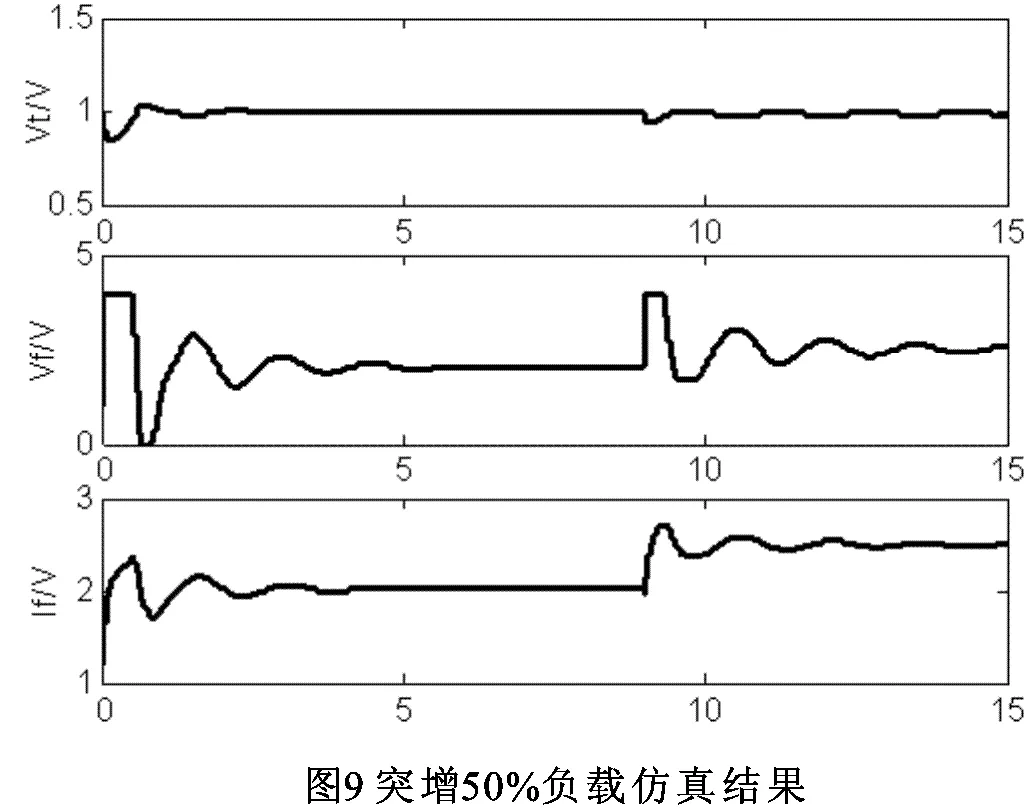
系统以额定负载启动,在其稳定运行后,在第8 s时突加50%发电机额定功率的三相负载。FPSO励磁控制仿真结果如图9所示,图中第一项为发电机端电压,第二项为发电机励磁电压,第三项为发电机励磁电流。粒子群优化控制在系统初始运作时可以快速的将端电压调节到参考值附近,模糊控制不断地对粒子群优化的参数进行优化,使端电压短时间内达到稳定运行。励磁电压和励磁电流经过一段按时间的波动后最终达到稳定。
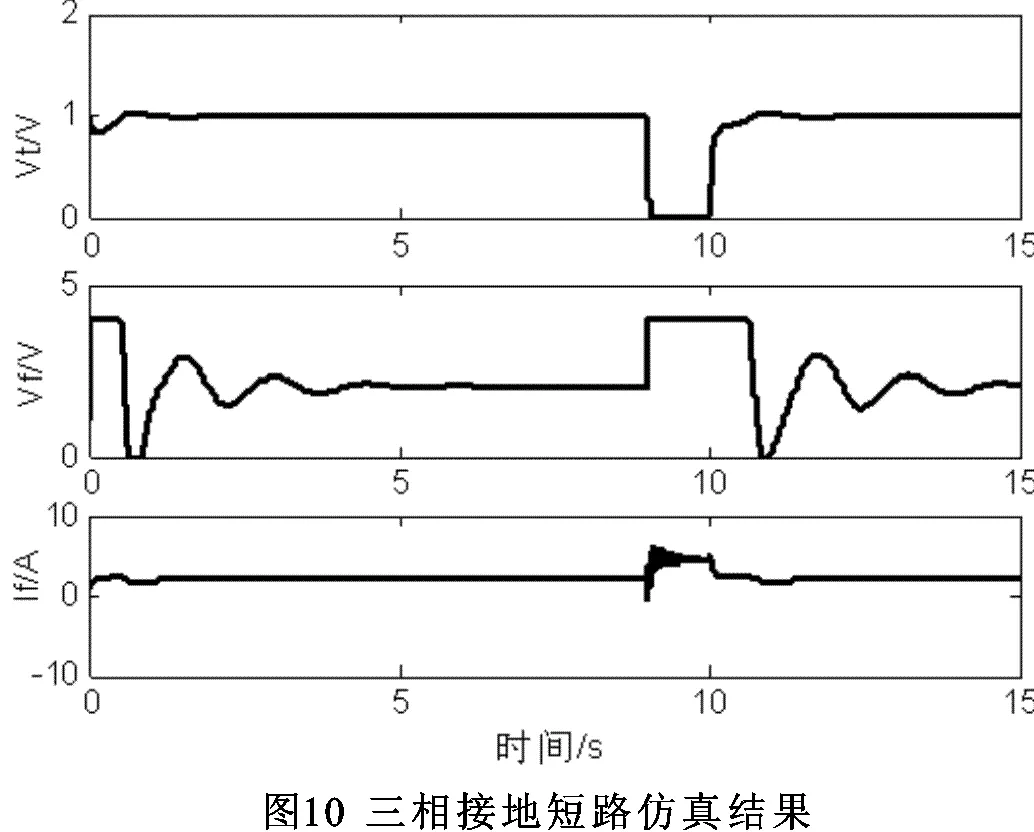
系统以额定负载启动,在其稳定运行后,在第8s时突加三项断路故障。FPSO励磁控制仿真结果如图10所示,图中第一项为发电机端电压,第二项为发电机励磁电压,第三项为发电机励磁电流。系统带动额定负载运行,在9-10s时发生三相接地短路故障,发电机端电压在FPSO励磁控制器的作用下可以快速地达到标准值。励磁电压和励磁电流经过短暂的波动后很快地达到了稳定状态。该控制系统能够很好地适应船舶运行工况的改变。
FPSO励磁控制器融合了模糊PID和粒子群优化算法两者的优点,在系统的工况发生改变时,能够快速的调整励磁系统的参数,改变系统的励磁电压以及励磁电流,使发电机端电压达到稳定状态,调节时间较少,超调量较小,系统具有很好的抗干扰能力,能够很好地保证了船舶电力系统安全和可靠的工作。
2.3模糊控制器的设计
4 结论
针对船舶电力系统的复杂性与非线性特性,本文利用粒子群优化算法能够很好地适应复杂系统参数的寻优的特性以及模糊控制对参数优化的精确性,将模糊PID控制与粒子群优化算法优化PID控制器进行结合,设计了FPSO励磁控制器,并对船舶柴油发电机励磁分别在突加三相负载和三相短路故障工况下的动态过程进行仿真与分析。与粒子群优化PID控制方法进行比较,系统响应较快,稳定时间较短,表明了FPSO控制器能够更好适应工况的改变以及干扰、故障的恢复,说明FPSO控制器具有很好的稳定性以及抗干扰的能力。
参考文献:
[1] 施伟锋,许晓彦.船舶电力系统建模与控制[M].北京:电子工业出版社,2012.
[2] 程启明.同步发电机励磁控制方法的发展与展望[J].电力自动化设备, 2012,32 (5):108-117.
[3] 孙新志.基于遗传算法的同步发电机模糊PID励磁控制器研究[D].西安理工大学,2005.
螺塞脱落者,如骨折愈合可行内固定取出;如骨折未愈合,可在局麻下重新锁紧螺塞。连接棒松动者,如骨折愈合可行内固定取出;如出现后凸畸形,应行传统手术进行后外侧融合。研究表明,经伤椎固定具有良好的生物力学矫形效果,可显著改善螺钉的应力分布、减少局部载荷集中,可避免螺钉断裂、松动[18]。因此,处理断钉、断棒、钉棒松动、螺塞退出等情况的翻修手术中,可增加伤椎置钉以提高内固定的稳定性。
[4] 陈子顺.船舶发电机励磁系统人工神经网络控制研究[D].上海海事大学,2004.
[5] 张艳,郭凯.船舶柴油发电机组转速的模糊RBF神经网络PID控制[J].船电技术,2014,34 (5):1-6.
[6] 欧阳松,汪敏.船舶发电机组的励磁系统模糊PID控制研究[J].船电技术,2015,25 (5):59-62.
[7] 杨美艳,徐庆增.改进粒子群模糊神经网络算法在同步发电机励磁参数整定中的应用[J].内蒙古师范大学学报,2015,44 (6):817-821.
[8] 黄卫华.模糊控制系统及应用[M].北京:电子工业出版社,2012.
[9] 张德丰.MATLAB/Simulink 建模与仿真实例精讲[M].北京:机械工业出版社,2011.
FPSO-based Excitation Control for Marine Diesel Generator Set
Chen Yong, Zhang Yan
(Department of Electrical Engineering and Automation, Shanghai Maritime University, Shanghai 201306, China)
TP271.4
A
1003-4862(2016)09-0044-05
2016-04-15
国家自然科学基金资助项目(61203110), 上海市教委科研创新项目资助(14YZ107)
陈勇(1992-),男,讲师。研究方向:船舶电力系统。
猜你喜欢
河北电力技术(2021年2期)2021-07-29 09:16:30
中国石油石化(2021年8期)2021-03-30 12:39:14
电子制作(2018年1期)2018-04-04 01:48:34
水电站机电技术(2017年9期)2017-09-26 03:34:52
大电机技术(2017年3期)2017-06-05 09:36:02
微特电机(2016年3期)2016-11-29 09:43:45
智能建筑电气技术(2015年5期)2015-12-10 05:52:30
科技创新导报(2015年32期)2015-04-12 09:22:46
水电站机电技术(2014年4期)2014-10-13 08:30:07
江苏通信(2014年4期)2014-04-14 06:18:42
