结合空间矢量法的D-STATCOM滞环电流控制方法
2016-10-13 15:52:22常鲜戎殷绕方
电力系统保护与控制 2016年10期
常鲜戎,殷绕方
结合空间矢量法的D-STATCOM滞环电流控制方法
常鲜戎,殷绕方
(华北电力大学电气与电子工程学院,河北 保定 071003)
D-STATCOM的控制方法直接影响其补偿精度、开关频率和功率损耗。为保证D-STATCOM具有较高的补偿精度并降低开关频率,提出了结合空间矢量法的滞环电流控制新方法。通过滞环电流控制法与空间矢量法结合,将D-STATCOM跟踪误差进行分区域处理,针对不同大小的跟踪误差采用不同的控制方法降低开关频率。同时,考虑到采用不同控制方法时D-STATCOM具有不同的补偿延时,对电流误差限值的确定方法进行了分析。仿真和试验样机表明,该方法能有效降低D-STATCOM开关频率且具有较高的补偿精度,证明了方法的正确性和可行性。
配电网静止无功发生器;三相四桥臂;滞环电流控制;空间矢量滞环控制;开关频率
0 引言
随着经济的发展和自动化设备的大量投入,电能质量越来越受到广大电力用户的重视。不同用户对电能质量的要求不同,定制电力技术向用户提供用户所要求的电能质量。D-STATCOM(配电网静止无功发生器)具有优异的补偿系统无功功率、滤除谐波和补偿系统不对称电流的能力,能动态跟踪补偿指令电流,是定制电力技术的重要研究内容。同时D-STATCOM也是建设智能电网、提高电力供应的可靠性和经济性、保证电能质量的重要设备。
由于D-STATCOM所使用的控制方法直接影响其补偿性能,因此,良好的控制策略是提高D-STATCOM的前提和关键。目前常用的控制方法有三角波比较法、空间矢量法和滞环电流控制法三种[1-6];另外无差拍控制、模糊控制、自适应控制等新型控制方法[7-11]也有学者提出,目前较少使用这类控制方法。三角波比较法具有输出开关频率固定、跟踪精度较低的特点;空间矢量法的开关频率较低、但计算量大控制较为复杂;滞环电流控制实现简单、控制精度高但开关频率不固定。
由于滞环电流控制具有对非线性系统优越的控制性能及较好的鲁棒性等优点,在D-STATCOM等电力电子设备的电流跟踪控制中得到了广泛的应用。针对滞环电流控制开关频率不固定的缺陷,主要的解决方法有以下几种:(1) 采用变环宽的方法,通过对D-STATCOM系统进行电路等效,并以此获得滞环环宽与开关频率的关系,并根据这种关系来改变环宽,从而限制开关频率[12-14];(2) 采用恒频或者准恒频的滞环电流控制,通过定时滞环比较的方法来使开关频率固定[15-16];(3)将滞环电流控制与空间矢量法结合,利用空间矢量法的优点来降低开关频率[17]。本文详细分析了传统的滞环电流控制方法,在此基础上提出三维电压空间矢量滞环电流控制方法,为进一步减小开关频率,提出针对不同大小的D-STATCOM电流跟踪误差采用不同的控制策略。通过仿真和试验验证该方法的有效性。
1 传统的滞环电流控制方法
D-STATCOM补偿非线性负载的拓扑结构如图1所示。D-STATCOM采用三相四桥臂结构。图中,si(a, b, c)为系统电源电压,ci(a, b, c, n)为D-STATCOM输出滤波电抗器端电压,si(a, b, c, n)为系统电流,ci(a, b, c, n)为补偿电流。D-STATCOM通过霍尔元件对系统电压电流以及补偿电流进行测量并提供给DSP进行指令电流的计算。DSP将计算出来的指令电流通过电流的跟踪控制形成IGBT的驱动信号。滞环电流跟踪控制将计算出的指令电流c与实际输出电流c相比较,差值Δc作为输入信号,通过滞环比较电路形成脉冲驱动信号。滞环电流控制的开关频率与环宽的关系由式(1)给出。
可以看出,滞环宽度大,开关频率低,但滞环宽度过大必然会导致跟踪误差过大,达不到所需要的补偿效果。通常,滞环宽度取负载峰值电流的1%~ 10%。对于采用三相四桥臂结构的D-STATCOM来说,每个桥臂都需要设置滞环电流比较器,由于各相滞环比较器之间独立工作,开关频率较大。
2 新型控制方法
2.1 基于三维电压空间矢量滞环电流控制方法
为保留滞环电流控制精度高的优点,弱化开关频率高的缺陷,将空间矢量法与滞环电流控制结合,分析基于三维电压空间矢量滞环电流控制方法。
为了方便分析,将并联D-STATCOM的等效电路简化为图2。用理想开关(a、b、c、n)等效IGBT并忽略电抗器的电阻则有:
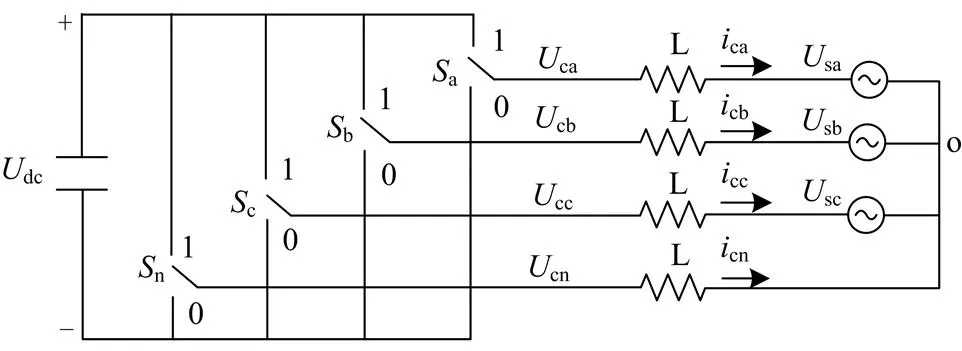
图2 D-STATCOM的等效电路
以系统中性点O为参考点,有:
(3)
其中式(3)中电压can、cbn、ccn可以由开关函数表示为
(4)
将can、cbn、ccn经变换可得到复平面上的U、U、U:
由于四桥臂主电路共有24=16种开关状态,将16种不同的开关模式带入式(5),可以得到不同开关模式下复平面的D-STATCOM输出端电压U、U、U,U(=0~15)为与开关状态abcn(0000~1111)对应的电压空间矢量,并满足:
(6)
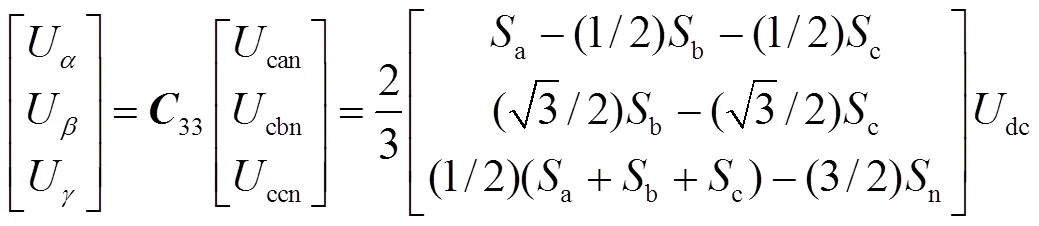
(=0~15)的16种开关模式所对应的电压空间矢量0~15形成复平面1个空间正六棱柱,其中0、15位于整个区域的中心,1~14位于空间正六棱柱的6个正三棱柱区域。每个正三棱柱区域包含8个电压空间矢量,并且都含电压矢量0、1、14和15,如图3所示。
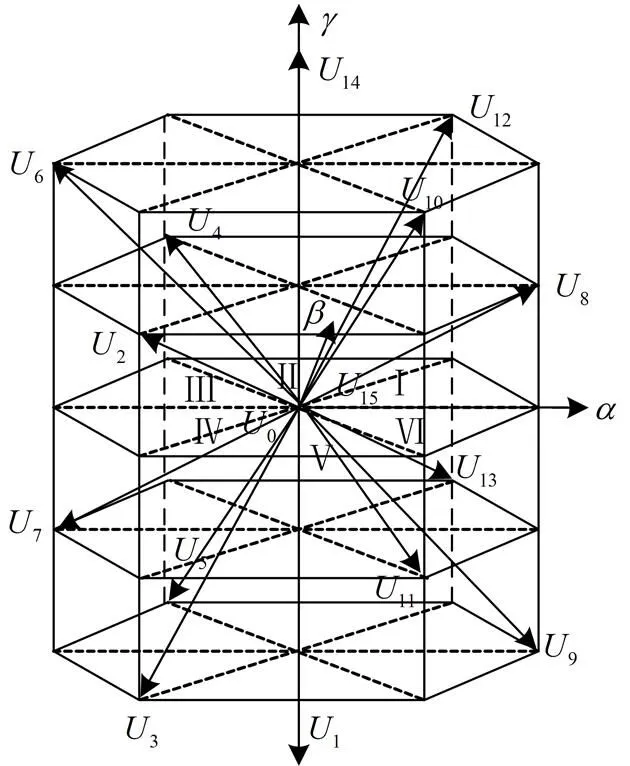
图3 αβγ复平面三维电压空间矢量图
由于D-STATCOM输出补偿电流满足:
将式(3)经过矩阵33变换,并结合式(7),可得:
(8)
并将式(8)写成矢量方程:
(10)
用式(10)减去式(9)可得:
式(11)可以看出电流误差矢量∆变化率的大小由指令电压矢量和D-STATCOM实际输出端电压矢量的差值所决定。在运算出指令电流以后,通过式(10)可以算出同一时刻的指令电压矢量。再结合同一时刻的补偿误差电流,确定出合适的D-STATCOM输出电压矢量,使输出补偿电流的跟踪误差尽可能小。对于指令电压矢量所在正三棱柱区域的判断,只需考虑每个电压矢量的、分量,见表1。
表1区域判定表
Table 1 regional decision table
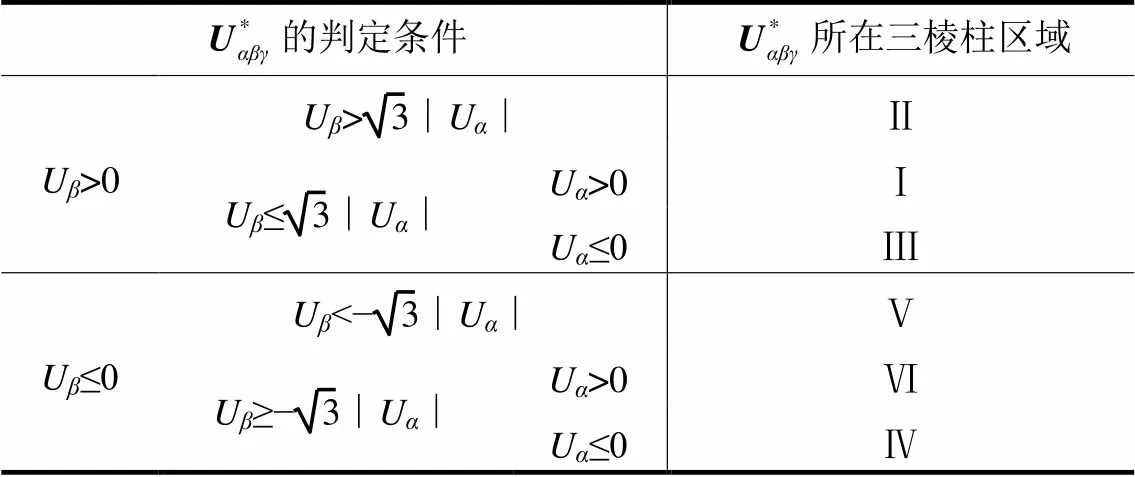
Table 1 regional decision table
的判定条件所在三棱柱区域 Uβ>0Uβ>∣Uα∣Ⅱ Uβ≤∣Uα∣Uα>0Ⅰ Uα≤0Ⅲ Uβ≤0Uβ<−∣Uα∣Ⅴ Uβ≥−∣Uα∣Uα>0Ⅵ Uα≤0Ⅳ
设定滞环比较器上限阈值和下限阈值分别为1和−1(1>0),且满足:
(13)
结合此刻(a、b、c、n)的状态值以及所在三棱柱区域,可以选择合适的电压空间矢量,进而确定在该时刻主电路的开关模式(a、b、c、n)。假如此刻U在三棱柱I区域,(a、b、c、n)的状态值为(1、0、0、0),那么此刻应该选择电压空间矢量8;如果此刻(a、b、c、n)的状态值在I区域没有与之对应的电压矢量,则选择输出零电压矢量0或15。整个基于三维电压空间矢量的滞环电流控制的流程如图4所示。
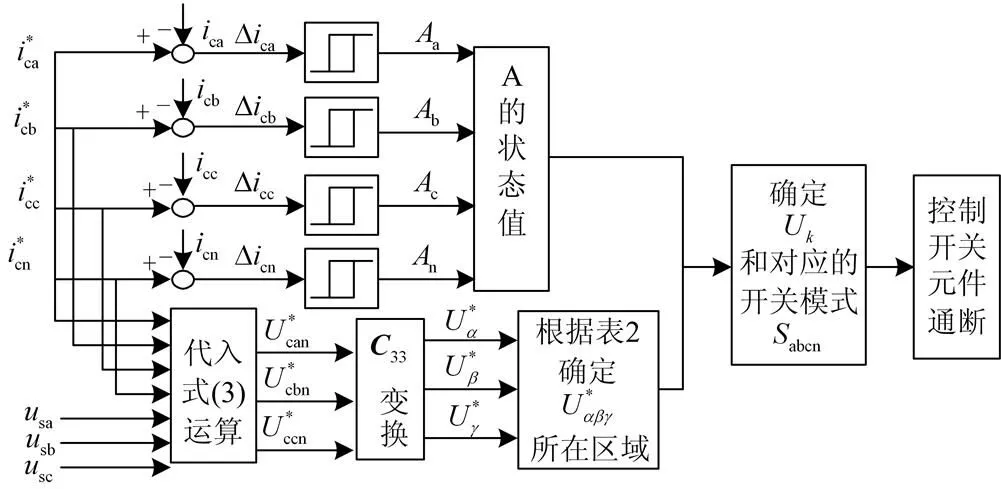
图4基于三维电压空间矢量滞环电流控制的流程图
表2k的选择表
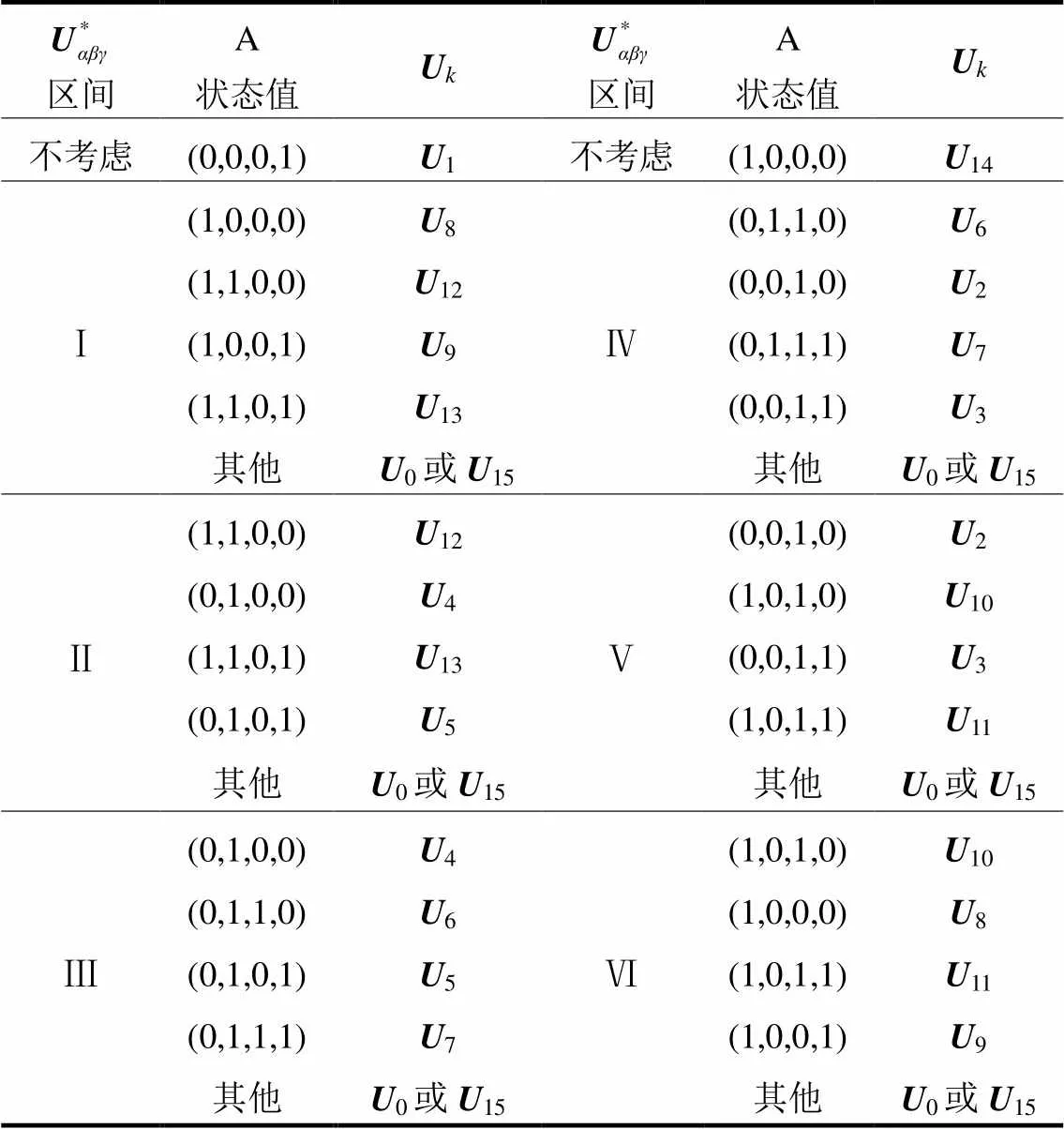
Table 2 Uk selection table
2.2 电流分区域控制方法
由上分析可知,由于滞环电流控制方法采用的各相滞环控制器相互独立,没有考虑相间影响,导致开关频率较高;基于三维电压空间矢量滞环电流控制通过系统分配零序电压矢量,能有效地降低开关频率。因此,滞环电流跟踪控制方法具有控制精度高,响应速度快,程序开销小但开关频率较高,损耗大的特点;而基于三维电压空间矢量滞环电流控制计算较多,程序开销大但具有较低的开关频率。为进一步降低开关频率并结合两种控制方法的优点,可以针对不同大小的电流跟踪误差采用不同的控制策略的方法。
具体做法如下:设容许的跟踪误差为||,将计算出的指令电流与输出电流差Δc分为三个区域:(1) Δc处于滞环之外(即|Δc>);(2)Δc处于滞环内但大于容许的跟踪误差(即||<|Δc|<);(3)Δc处于滞环内且小于容许的跟踪误差(即||>|Δc|)。算出指令电流与输出电流差Δc之后,先判断Δc所在的区域,根据Δc所在的区域不同选择不同的控制方法:当Δc处于区域(1)时,跟踪误差较大,采用滞环电流控制方法迅速减小输出电流误差;当Δc处于区域(2)时,跟踪误差相对较小,采用三维电压空间矢量滞环电流控制方法,在减小输出电流误差的同时减小开关频率;当Δc处于区域(3)时,由于跟踪误差很小,为了降低开关频率,应保持开关状态不变。控制流程图如图5所示。
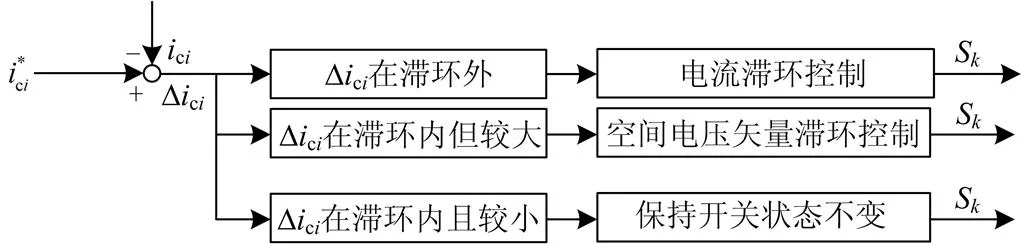
图5电流分区控制流程图
2.3 考虑补偿延时电流误差限值的确定
由于电流传感器、AD采样、指令电流计算、驱动控制以及开关信号的开关动作延迟的影响,电流控制策略可能产生错误的驱动脉冲信号致使输出电流不能实时跟踪指令电流。因此,在确定电流误差限值时需要考虑补偿延时的影响。为方便分析,这里将用滞环电流控制时的补偿延时记为dhcc,用空间矢量滞环电流控制时产生的补偿延时记为dsvpwm。在ccs编程软件中,可以通过断点设置和Clock工具获得dhcc和dsvpwm。
图6表示电流误差随时间的变化关系。为方便分析,选取电流误差Δc<0的部分进行分析。由图可以看出,最优的电流跟踪误差应处于-~0之间(即(1)区),此时电流跟踪误差很小,只需保持开关状态不变;但是由于没有对开关状态进行更新,随时间推移,电流跟踪误差必然会进入-~ -的区域((2)区),实际上(1)区域是一个不稳定的区域。
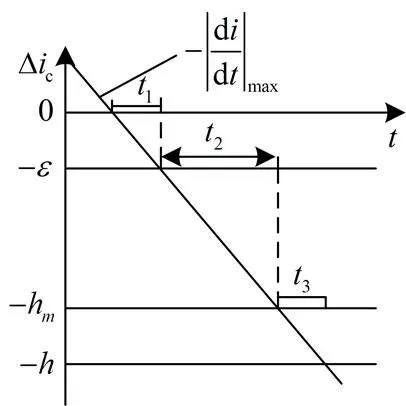
图6电流误差与时间关系
当电流误差处于(2)区域时,采用基于空间矢量的滞环电流比较法减小电流跟踪误差。但是,当Δc接近-时,由于dsvpwm相对比较大,这时会由于补偿延时导致跟踪误差电流越过进入(3)区,导致电流误差过大。为了防止这种情况,可以在-和之间确定-h,在Δc<-h时使用滞环电流比较法,并且使得当Δc<-h时,使用基于空间矢量的滞环电流比较法时误差电流进入(3)区,而当Δc≥-h时使用基于空间矢量的滞环电流比较法误差电流在(1)区或(2)区。由上分析有:
(15)
3 仿真分析
将滞环电流控制方法与本文所提的新型电流控制方法在Matlab上进行仿真分析。仿真系统拓扑如图1所示。仿真参数为:系统电压有效值为380 V,D-STATCOM直流侧电容为15 mF,电容电压800 V,滤波电感为2.5 mH。负载侧为三相整流桥带250 Ω电阻的纯阻性负载。滞环宽度取系统电流峰值的1%,允许电流误差为系统电流峰值的0.4%。仿真结果如图7所示。
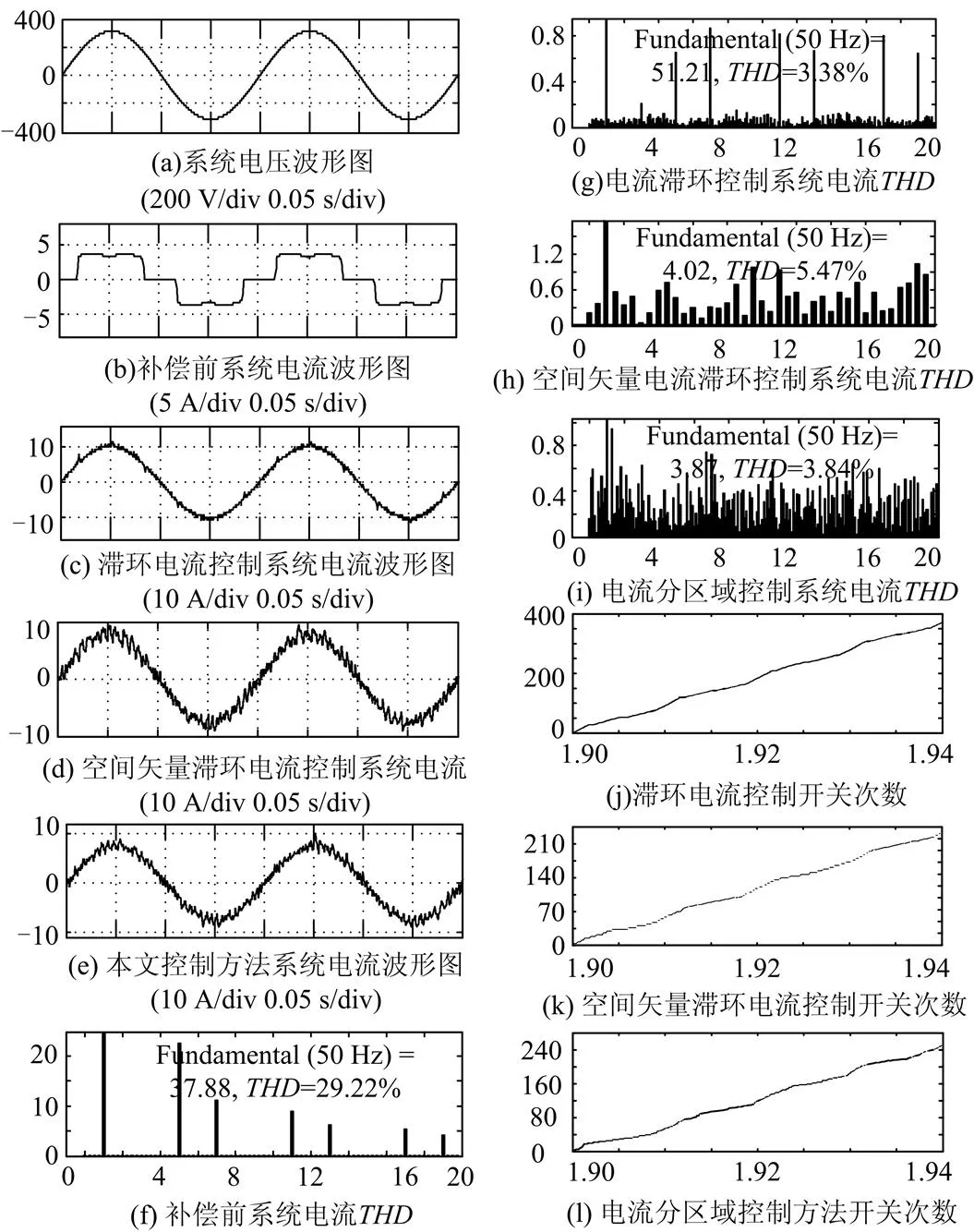
图7仿真结果
从图中可以看出:D-STATCOM补偿前,系统电流发生了严重的畸变,由FFT分析可以看出其畸变率为29.22%,采用滞环电流跟踪控制之后系统电流畸变率变为3.38%,此时开关频率约为10 kHz,极大地改善了电能质量;采用基于空间矢量滞环电流跟踪控制之后系统电流畸变率变为5.47%,此时开关频率约为5.6 kHz;采用电流分区控制后其畸变率为3.84%,开关频率约为6 kHz。可以看出,采用电流分区控制在减小系统电流谐波畸变率的性能上面与滞环电流跟踪控制的方法差别较小,与基于空间矢量滞环电流跟踪控制的开关频率相差不大,能有效地降低D-STATCOM的功率损耗。
根据上面的理论研究与仿真分析,研制了一台实验样机进行实验,实验结果如图8所示。

图8 实验结果
可以看出,补偿前系统电流发生了严重的畸变,补偿后系统电流波形基本为正弦波,所研制的D-STATCOM能有效地改善系统电流波形,从而证明了所用方法的有效性。
4 结论
结合滞环电流跟踪控制与空间矢量控制的优点,将计算出的跟踪误差电流分成在滞环外、滞环内较大和滞环内较小三种不同情况来采用不同的控制方法。该方法能有实现快速跟踪指令电流,改善电能质量,同时减小D-STATCOM的开关损耗,具有较好的实用性。
[1] 王伟, 周林, 徐明. 有源电力滤波器控制方法综述[J]. 继电器, 2006, 34(20): 81-86.
WANG Wei, ZHOU Lin, XU Ming. Control methods of active power filter[J]. Relay, 2006, 34(20): 81-86.
[2] 冯德仁, 姚兆虎, 罗进, 等. DSP技术应用于双重化有源电力滤波器[J]. 电力系统及其自动化学报, 2014, 26(9): 71-75.
FENG Deren, YAO Zhaohu, LUO Jin, et al. Application of DSP technology on dual active power filter[J]. Proceedings of the CSU-EPSA, 2014, 26(9): 71-75.
[3] 侯冲, 肖铁军, 范岩, 等. 并联型有源电力滤波器的MATLAB仿真研究[J]. 电网与清洁能源, 2013, 29(9): 11-17.
HOU Chong, XIAO Tiejun, FAN Yan, et al. Research on shunt active power filter with MATLAB simulation[J]. Power System and Clean Energy, 2013, 29(9): 11-17.
[4] 黄传金, 宋海军, 陈铁军, 等. 三相四开关APF的SVPWM优化策略研究[J]. 电力电子技术, 2012, 46(8): 44-45.
HUANG Chuanjin, SONG Haijun, CHEN Tiejun, et al. Research on the SVPWM optimizational strategy of TFSAPF[J]. Power Electronics, 2012, 46(8): 44-45.
[5] 李满, 钱平. 基于空间矢量控制策略实现的有源电力滤波器的建模与分析[J]. 电力系统保护与控制, 2014, 42(15): 87-93.
LI Man, QIAN Ping. Modeling and analysis of APF on the strategy of SVPWM[J]. Power System Protection and Control, 2014, 42(15): 87-93.
[6] 姚致清, 赵倩, 刘喜梅. 基于准同步原理的逆变器并网技术研究[J]. 电力系统保护与控制, 2011, 39(24): 123-126.
YAO Zhiqing, ZHAO Qian, LIU Ximei. Research on grid-connected technology of inverter based on quasi synchronous principle[J]. Power System Protection and Control, 2011, 39(24): 123-126.
[7] 张晓, 李新宇, 周睿. 三相四桥臂并联型APF无差拍控制策略的研究[J]. 电力系统保护与控制, 2011, 39(20): 78-83.
ZHANG Xiao, LI Xinyu, ZHOU Rui. Study on a deadbeatscheme for three-phase-four-lag shunt active power filter[J]. Power System Protection and Control, 2011, 39(20): 78-83.
[8] 郭三明, 孙鹏荆, 敬树仁, 等. 基于预测模型的STATCOM功率控制策略建模与仿真[J]. 电力系统保护与控制, 2015, 43(1): 88-92.
GUO Sanming, SUN Pengjing, JING Shuren, et al. Research on modeling and simulation of power control method for STATCOM based on predictive model[J]. Power System Protection and Control, 2015, 43(1): 88-92.
[9] 伏祥运, 王建赜, 纪延超, 等. 静止坐标系下D- STATCOM自适应无差拍控制[J]. 电力系统自动化, 2007, 31(8): 41-45.
FU Xiangyun, WANG Jianze, JI Yanchao, et al. Adaptive deadbeat control in stationary reference frame for D- STATCOM[J]. Automation of Electric Power Systems, 2007, 31(8): 41-45.
[10] 郭喜峰, 王大志, 刘震, 等. 有源电力滤波器滞环电流的模糊控制策略[J]. 东北大学学报(自然科学版), 2012, 33(8): 1098-1102.
GUO Xifeng, WANG Dazhi, LIU Zhen, et al. Hysteresis current fuzzy control strategy for APF[J]. Journal of Northeastern University (Natural Science), 2012, 33(8): 1098-1102.
[11] 江全才, 马骁旭, 李红刚. 新型三相三线制模糊滑模控制并联有源滤波器设计[J]. 电力系统保护与控制, 2014, 42(7): 128-133.
JIANG Quancai, MA Xiaoxu, LI Honggang. Novel fuzzy sliding mode control method for three-phase three-wire shunt active power filter[J]. Power System Protection and Control, 2014, 42(7): 128-133.
[12] 肖丽平, 童朝南, 高润泉. 改进的有源电力滤波器滞环电流控制策略[J]. 电力系统自动化, 2014, 38(12): 119-124.
XIAO Liping, TONG Chaonan, GAO Runquan. An improved hysteretic current method for active power filter[J]. Automation of Electric Power Systems, 2014, 38(12): 119-124.
[13] 徐永海, 刘晓博. 考虑指令电流的变环宽准恒频滞环电流控制方法[J]. 电工技术学报, 2012, 27(6): 90-95.
XU Yonghai, LIU Xiaobo. A variable hysteresis-band and quasi-constant current controller with reference current[J]. Transactions of China Electrotechnical Society, 2012, 27(6): 90-95.
[14] 杨凌霄, 和志威. 改进型有源滤波器滞环电流控制方法[J]. 工矿自动化, 2014, 40(7): 67-71.
YANG Lingxiao, HE Zhiwei. Improved hysteresis circle current control method for active power filter[J]. Industry and Mine Automation, 2014, 40(7): 67-71.
[15] 洪峰, 单任仲, 王慧贞, 等. 一种变环宽准恒频滞环电流控制方法[J]. 电工技术学报, 2009, 24(1): 115-119.
HONG Feng, SHAN Renzhong, WANG Huizhen, et al. A varied hysteresis-band current controller with fixed switching frequency[J]. Transactions of China Electrotechnical Society, 2009, 24(1): 115-119.
[16] 马骁. 静止无功发生器联合补偿协调控制研究[D]. 哈尔滨: 哈尔滨工业大学, 2011.
MA Xiao. Research on coordination control of combined compensating by static VAR generator[D]. Harbin: Harbin Institute of Technology, 2011.
[17] 叶小军, 曾江, 王克英, 等. 并联有源电力滤波器双滞环电流控制策略[J]. 电力系统保护与控制, 2009, 37(9): 60-64.
YE Xiaojun, ZENG Jiang, WANG Keying, et al. Double hysteresis current control strategy for shunt active power filter[J]. Power System Protection and Control, 2009, 37(9): 60-64.
(编辑 葛艳娜)
A hysteresis current control method combined with SVPWM for D-STATCOM
CHANG Xianrong, YIN Raofang
(School of Electric and Electronic Engineering, North China Electric Power University, Baoding 071003, China)
The control strategy of D-STATCOM directly influence its compensation accuracy, switch frequency and power loss. A novel control strategy is proposed to reduce the switch frequency on the assurance of its compensation accuracy. Combining hysteresis current control method with SVPWM, the control strategy proposes that different current size uses different control method to realize fast track and low switch frequency; at the same time, the determination of current error threshold method is analyzed considering different control strategy has different compensation delay for D-STATCOM. Simulation and experiment show this method can reduce switch frequency efficiently and high compensation accuracy, so the correctness and feasibility of the proposed method is proved.
D-STATCOM; three-phase-four leg; hysteresis current control; space-vector-based hysteresis control; switch frequency
10.7667/PSPC151127
2015-07-02;
2015-08-17
常鲜戎(1956-),男,博士,教授,研究方向为电力系统分析与控制;
殷绕方(1990-),男,硕士研究生,研究方向为电力系统分析与控制。Email: 863517618@qq.com
猜你喜欢
中学生数理化·高一版(2021年11期)2021-09-05 12:21:24
天天爱科学(2020年6期)2020-09-10 07:22:44
山东冶金(2019年5期)2019-11-16 09:09:38
人生十六七(2016年14期)2016-12-01 05:24:26
美术文献(2016年6期)2016-11-10 09:09:40
现代防御技术(2016年1期)2016-06-01 12:13:28
新高考·高一物理(2016年1期)2016-03-05 22:47:39
现代农业(2015年1期)2015-02-28 18:40:09
全球定位系统(2015年4期)2015-02-28 12:38:08
海峡姐妹(2014年5期)2014-02-27 15:09:41