
多帧背景差与Cauchy模型融合的目标检测
2016-10-13 08:36王凯,吴敏,姚辉,杨樊,张翔
光电工程 2016年10期
王 凯,吴 敏,姚 辉,杨 樊,张 翔
多帧背景差与Cauchy模型融合的目标检测
王 凯1,吴 敏1,姚 辉1,杨 樊1,张 翔2
( 1. 中国民用航空总局第二研究所科研开发中心,成都 610041;2. 电子科技大学电子工程学院,成都 611731 )
为有效解决复杂监视场景中快速、准确检测运动目标,提出一种多帧背景差与柯西(Cauchy)模型融合的目标检测方法。该方法首先借鉴Surendra背景模型的思路进行改进,采用多帧背景差法获取干净的背景图像,然后利用实时的视频图像和当前的背景图像进行绝对差分处理,最后通过Cauchy模型对整幅绝对差分图像上的点进行背景点和前景点判别,实现对复杂监视场景中目标的准确检测。针对车辆、行人等不同对象的监控场景下进行实验,验证了本文方法不仅能够有效地抑制噪声及伪目标的干扰,而且能够快速、准确地分割出前景目标。
多帧背景差;Cauchy模型;目标检测;Surendra背景模型;绝对差分图像
0 引 言
目标检测技术作为智能监控视频领域中的重要分支之一,在人类现实生活中得到了广泛应用,涉及到智能交通系统、军事防御、住宅安防、工业机器人等领域,因此获得众多国内外学者的关注和研究。目标检测技术能够提供运动目标区域、方位等参数信息,并用于后续数据融合及目标跟踪模块,因此该技术的好坏直接影响到整套实时视频监控系统的可靠性和稳定性。
对于固定摄像机[1-2]下采集的视频图像进行运动目标检测,其重要环节是背景建模与图像差分。首先,背景图像建模及更新方法主要有:1) Surendra背景建模与更新方法[3],通过对运动信息判断来对背景图像进行更新,实现简单、快速,但不能判断停留物体。2) 背景统计法[4],通过对一段时间内灰度图像进行累加取平均值,无法保障背景图像的质量。3) 背景模型法[5],通过对每个像素点建立符合某种概率分布的背景统计模型,得到的背景质量较高,但计算复杂,如文献[5-6]中提及混合高斯模型(Gaussian Mixture Model,GMM)方法进行背景建模与更新。目标检测主要分为三类:光流法、帧差法和背景差法等[7]。其中光流法运算量太大,而且容易受到噪声、光照不均等外界因素的影响[8];帧差法运算量较小,但是无法检测到静止状态下的运动目标[10-11]。背景差法虽然简单快速,但是容易受到噪声干扰[12]。
为有效的快速、准确检测复杂监视场景中运动目标,本文借鉴Surendra背景法的思路,并结合Cauchy分布模型判别优势,提出了一种多帧背景差与Cauchy模型融合的目标检测方法。其基本思想是首先将初始背景图像和实时视频图像平均划分为大小相同的图像块,通过多帧间的背景差信息来判断各个图像块是否属于运动区域,并只对运动区域进行背景更新;然后采用实时视频帧和当前背景图像的绝对差分以及Cauchy分布模型对整幅绝对差分图像上所有像素点的归属进行判定,最终实现运动目标的精确检测。且针对车辆、行人及飞机原始视频对文献[5-6]提及GMM方法、本文改进前后方法进行了检测效果及性能对比。
1 初始背景的提取与更新
本文主要在分析现有Surendra背景更新算法的基础上,提出了一种基于图像分块的多帧背景差的动态背景更新算法。首先将初始背景和实时图像都分为大小相等的若干小块,然后对比各帧和背景差的结果,以此判断需不需要更新背景。利用实时获取的图像和背景图像进行差分,即可获取前景目标图像。
在对背景进行更新之前,需要获取一个初始的系统背景。由于初始背景的质量要求不高,可采用统计法。即对系统启动最初的幅视频图像统计,求出每个像素点的平均值,作为初始背景图像。数学描述:

其中:(,)为背景图像,(,,)为时刻的图像,、为像素的横纵坐标。
1.1 Surendra背景更新算法
1995年Surendra[4]介绍了一种背景更新策略,即Surendra背景法。具体方法是对图像进行帧差运算,检测各个像素点是运动区域还是非运动区域。如某个像素点不是运动区域,则用实时图像中的点代替背景图像中对应的像素点,如果某个像素点是运动区域,则不对背景进行更新而保留背景图像中对应的像素点,通过这种运动区域的判断从而得到实时的背景图像。可以描述为

式中:(,,)和(,,-1)分别为和-1时刻的视频图像,为固定阈值。如果某个像素点帧间差的绝对值小于或等于,那么此像素点为非运动区域,并对此区域进行更新,否则保留原背景。
这种方法在进行背景更新的时候认为图像和总像素点在时间和空间上都是独立而无联系的。然而,实际上图像中的每个像素点并不是孤立的,他们之间在空域和时域上都具有一定的联系。因此,只考虑单个像素点对背景进行更新的策略不能很好的适应各种场景中的各种因素的影响。同时,因为这种方法采用的是帧间差进行背景的更新,如果背景中存在运动物体的停留,这种更新算法就会将其刷成背景。所以,此算法进行背景更新的鲁棒性和自适应性较差。为此,本文在更新策略上进行了改进处理。
1.2 改进的背景更新算法
针对上述方法背景更新不及时、无法判断短暂停留的目标等固有缺陷,并融合Surendra算法中判断运动区域和非运动区域,只需对非运动区域进行更新的思路上,提出了一种基于图像分块的多帧背景差方法。
首先,将每张图片平均划分为对应大小相同的图像块。本实验中图像的大小分别为320×240和1280×720,那么分别将其分割成40×30(1 200)和160×90(14 400)块大小相同的图像块Box(,,),每个图像块中的像素个数为8×8(64)个。然后将时刻和-Δ时刻的图片分别对背景图像进行差分,以此两个差分结果的信息为依据判断各个像素点是运动区域或非运动区域。然后根据图像的分块,将每个图像块中的运动像素点进行统计,如果运动像素点的总和占图像块的比例大于某个阈值,则认为此图像块为运动区域,将其标记为0,不对其进行背景更新;反之则为非运动区域(标记为1),对其进行背景更新。如下式可知:

(4)
在实际应用中背景更新可能会遇到光照、天气的突变或者固定摄像机的突然移位等情况。这些情况的发生都会使背景发生大面积的突变,从而形成全局性的背景改变。针对这种情况,本文考虑到之前图像分成运动区域和非运动区域,如果非运动区域的前景突然增多,那么认为发生了全局背景突变的情况,系统重新启动对背景的初始化工作,尽快得到突变后的背景图像。
图1分别为均值法、Surendra背景法、本文改进的背景建模法(在视频图像序列前80帧)获得的背景图像。从图1可以看出,均值法和Surendra背景法建立的背景图像模糊并伴有局部的噪声,而本文采用多帧背景差法考虑了帧间差信息,能够获得比较干净的背景图像。
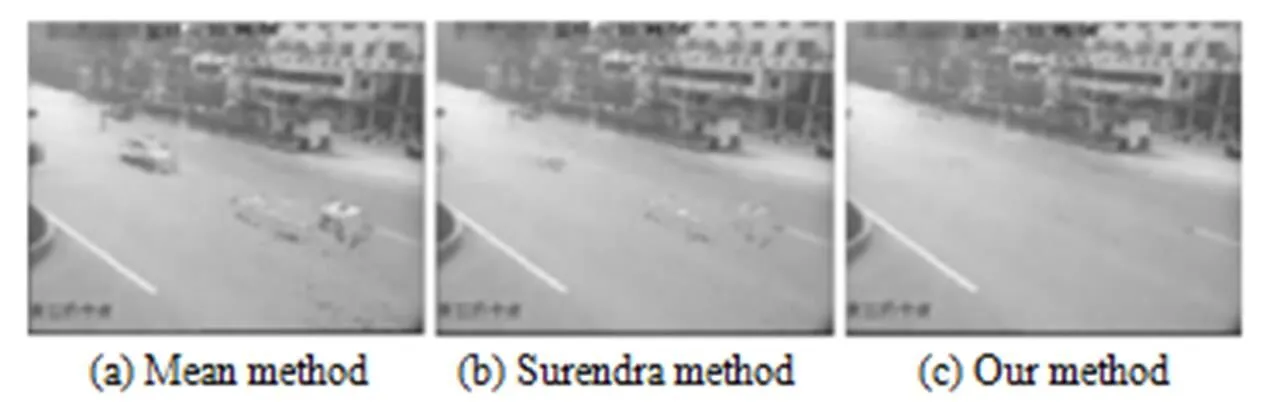
图1 背景模型的对比
图2(a)为实时视频帧,视频中左边出现短暂逗留的行人目标;图2(b)和图2(c)分别为Surendra背景法、本文背景法更新获得的背景图像。从图2可知,传统Surendra背景法认为存在运动目标短暂停留的两帧图像之间像素点差值很小,所以将短暂逗留的运动目标误认为是背景而将其刷入系统背景。本文由于采用的是背景差法,能够较准确的判断出静止物体是否为前景目标,所以不会将短暂逗留的前景目标误认为是背景,大大减少了误判的发生。能够满足复杂监控场景中提取出比较干净的背景。

图2 目标短暂停留的背景模型(第160帧)
2 目标检测
通过以上背景初始化及更新策略获得质量较好的背景图像之后,下一步进行不同监视场景中运动目标检测。本文目标检测阶段的策略为计算当前帧图像和当前背景图像的绝对差分,获得绝对差分图像,对该差分图像上的像素点分别计算其前景和背景的Cauchy分布模型。利用每个像素点的两个Cauchy分布模型的大小比对判别出当前差分图像上每一像素点的前背景归宿,从而在差分图像上准确获得前景目标区域。
2.1 绝对差分与Cauchy分布模型
绝对差分是由视频序列当前帧I(,)与当前背景模型B(,)之间的差分取绝对值得到,其公式如下:

本文引用的Cauchy分布模型数学描述如下:
(6)
式中:表示Cauchy模型的位置参数,表示Cauchy模型的尺度参数。
2.2 基于Cauchy分布模型的目标检测
计算当前绝对差分图像上的所有像素点的前景和背景的Cauchy分布模型,比较同一像素点的两个Cauchy分布模型的大小,判定该点是否属于前景目标区域的点,并准确找出前景目标区域,对该绝对差分图像上的目标区域和背景区域分别采用二值化方法得到检测后的前景目标。
统计绝对差分图像的灰度直方图函数hist,在一帧绝对差分图像上灰度级为的像素个数:

绝对差分图像上的某一像素点(,)的背景Cauchy分布模型1定义为
(8)
绝对差分图像上的某一像素点(,)的前景Cauchy分布模型2:
(10)
式中是2模型的位置参数,计算式:
式中:max是视频序列的绝对差分图像上的最大灰度级。之后对每一帧图像上的所有像素点都采用两个Cauchy分布模型1、2的大小来判别其归宿。通过文献[5]给出的参数数据及实验过程中的调试,取=25时实验结果最优。
由于每个像素点都需要对1、2进行大小对比,对1、2时,略去它们共同的公因子1/π,以减少计算冗余。同时在实验过程中,针对不同类型的运动目标进行检测和分割时,采用不同的判别系数(0.6至2.0之间),即复杂交通监视场景下=1.3,行人监视场景下=1.0,机场场面监视场景下=1.5。Cauchy分布模型对某一像素点的归宿判定过程如下:如果1>×2时,那么I(,)属于背景区域;否则,I(,)属于前景目标区域。采用Cauchy分布模型对像素点的归宿情况进行判定的优点是:Cauchy分布模型中拥有动态参数、,这两个动态参数在每一帧实时图像都进行了更新计算,而非直接用传统的固定阈值来判定像素的归属情况,避免了采用经验值的弊端。
3 实验仿真与分析
本实验的硬件平台为Intel® Core™2 Duo CPU T6500;2G内存;32位Windows 7操作系统,软件编写环境为VS2010和OPENCV2.4.3。测试分别用26 min行人、车辆(分辨力均为320´240@25 f/s)及飞机(分辨力为1 280´720@20 f/s)原始监控视频作为实验素材。视频存在慢动目标、快速目标及背景噪声干扰情况。

其中:t为正确检测目标的像素个数,1为错误将背景检测为目标的像素个数,2为错误将目标检测为背景的像素个数,精确度表示检测出的目标样本中真实目标比例,准确度表示正确判断出真实目标比例,值表示综合性能。
3.1 目标检测方法的效果对比
针对以上三种不同场景下的视频作实验素材,对文献[5-6]中提及GMM方法、改进前的方法以及本文方法对感兴趣的目标检测效果测试与对比,其效果如图3所示(阈值为25)。图3中(a)、(b)及(c)分别为行人检测、复杂交通路口车辆检测以及机场场面飞机检测,其中第一行为原始视频帧图像,第二行为GMM方法检测效果图,第三行为改进前的方法检测效果图,第四行为本文方法检测效果图。在以上监控视频中包含了光照变化、停止目标以及快速与慢行目标的影响。由图3(a)、(b)及(c)可知,本文方法比GMM方法和改进前方法检测的效果都好,前景目标也较完整。文献[5-6]中提及GMM方法检测时,容易受到外部噪声的影响,并且当出现光照变化时,不能做出及时响应;改进前的方法利用Surendra背景更新策略,当遇到复杂环境变化以及前景目标与背景颜色相似时还是容易被影响,不能够精确地检测出目标;本文方法采用改进多帧背景差更新机制,考虑到帧间差信息,达到提取干净的背景图像,然后通过实时视频帧和当前背景图像的绝对差分以及Cauchy分布模型进行归宿判断,能够有效地排除外界噪声、光照变化以及复杂监视场景的影响,最终获得比较精确的检测结果,并且能够满足不同视频监视场景下的目标检测。
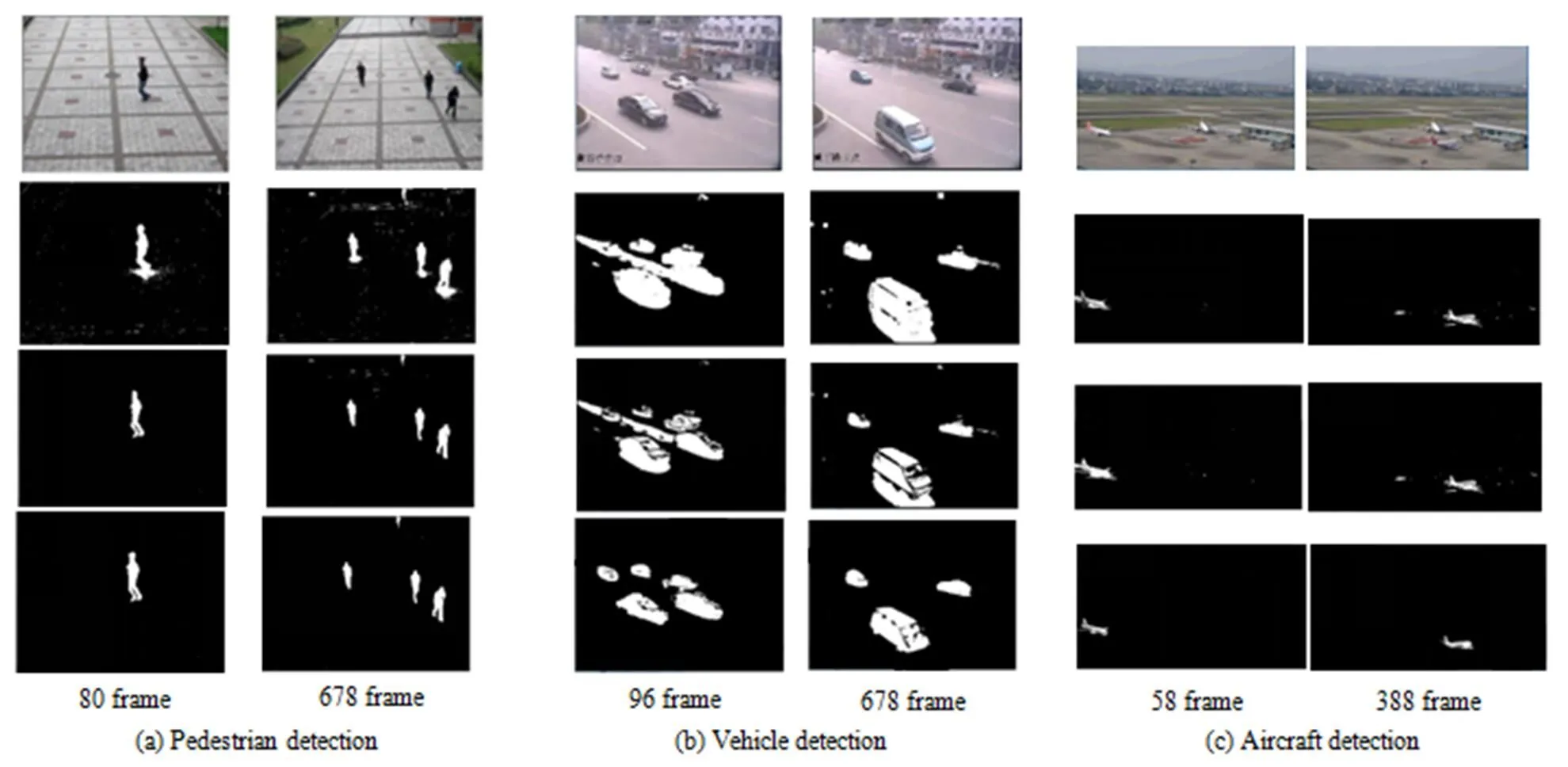
图3 不同场景下三种方法检测对比图
3.2 目标检测方法的性能对比
针对以上测试的结果,进一步定量分析各方法的性能,从图3(b)复杂交通路口车辆检测视频中手动分割出178幅包含多个目标区域的图像序列当作对比基准,根据式(12)分别计算三种目标检测方法在每帧图像序列中的三个性能指标,同时绘制相应的曲线图进行对比,如图4所示。
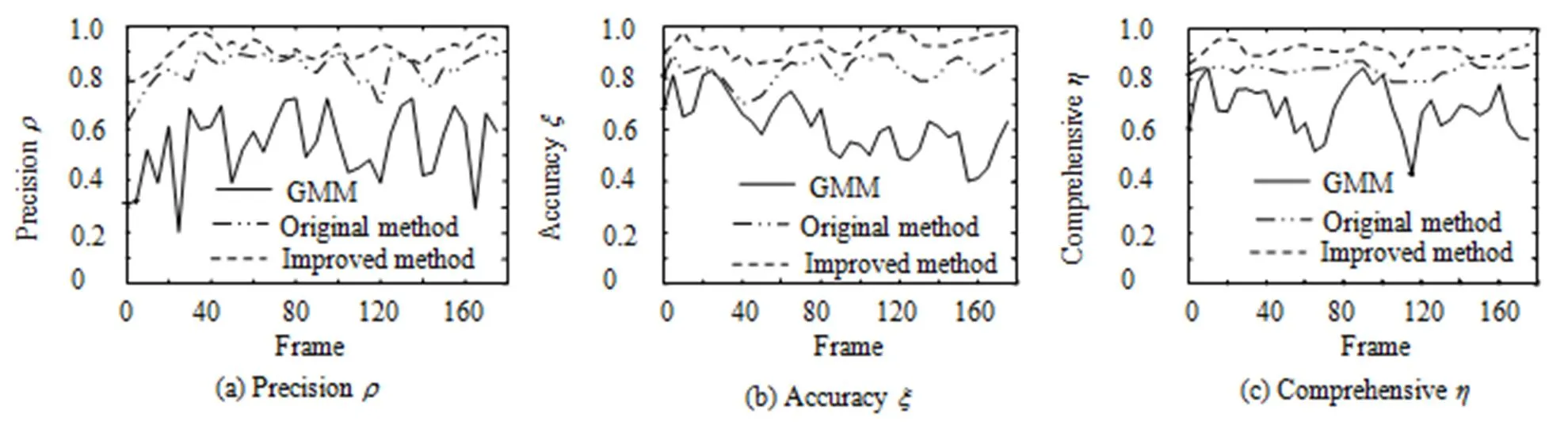
图4 三种目标检测方法的曲线图
最后,实验利用Intel VTune对三种方法在以上三种不同监视场景下的原始视频分别进行了处理速度的测试,视频采取30次求平均,如表1。由表1可知,本文方法明显快于文献[5-6]中提及GMM方法,与改进前的方法平均处理速度接近,满足实时性要求。可知本文方法在背景更新环节采用图像分块处理,节省了部分时间;在目标检测环节采用Cauchy模型确定前景目标,因此算法简单快速。

表1 三种方法平均处理速度对比
结束语
本文在摄像头固定以及不同监视场景的情况下,针对行人、车辆及飞机进行目标快速、精确检测,提出一种多帧背景差与Cauchy模型融合的目标检测方法。主要内容为首先将初始背景图像和实时视频图像平均划分为大小相同的图像块,通过多帧间的背景差信息来判断各个图像块是否属于运动区域,并只对运动区域进行背景更新;然后采用实时视频帧和当前背景图像的绝对差分以及Cauchy分布模型对整幅绝对差分图像上所有像素点的归属进行判定,最终实现运动目标的精确检测。
参考文献:
[1] SHEN Yiran,HU Wen,YANG Mingrui. Real-time and robust compressive background subtraction for embedded camera networks [J]. IEEE Transactions on Mobile Computing(S1536-1233),2016,15(2):406-418.
[2] 黄凯奇,陈晓棠,康运锋,等. 智能视频监控技术综述 [J]. 计算机学报,2015,38(6):1093-1115.
HUANG Kaiqi,CHEN Xiaotang,KANG Yunfeng,. Intelligent visual surveillance:A review [J]. Chinese Journal of Computer,2015,38(6):1093-1115.
[3] Girshick R,Donahue J,Darrell T,. Rich feature hierarchies for accurate object detection and semantic segmentation [J]. Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition(S0056-1200),2014,2(6):580-587.
[4] YANG Mingyang. A moving objects detection algorithm in video sequence [J]. 2014 International Audio,Language and Image Processing(S4799-3902),2014,10(11):410-413.
[5] TAN Yihua,WU Dan,SUN Airong,. Adaptive and fast target detection in high-resolution SAR image [J]. 2014 IEEE International Geoscience and Remote Sensing Symposium(S2153-6996),2014,5(6):470-473.
[6] 周杰,郭立君,张荣. 基于集群性特征的异常行为检测 [J]. 光电工程,2015,42(9):35-40.
ZHOU Jie,GUO Lijun,ZHANG Rong. Abnormal behavior detection based on collectiveness feature [J]. Opto-Electronic Engineering,2015,42(9):35-40.
[7] Kim S,Yang D,Park H. A disparity-based adaptive multi-homography method for moving target detection based on global motion compensation [J]. Circuits and Systems for Video Technology(S1051-8215),2014,1(1):1-5.
[8] Omar E,Driss M,Hamid T. Motion detection based on the combining of the background subtraction and spatial color information [J]. IEEE Intelligent Systems and Computer Vision(S4799-7510),2015,5(1):1-4.
[9] 王正宁,刘昌忠,王娟,等. 一种双门限场面运动目标检测系统:中国,201120089757 [P]. 2011-11-16.
WANG Zhengning,LIU Changzhong,WANG Juan,. A double-threshold moving target detection system:China,201120089757 [P]. 2011-11-16.
[10] Deepak K,Sukadev M. Detection of moving objects using fuzzy color difference histogram based background subtraction [J]. IEEE Signal Processing Letters(S1070-9908),2016,23(1):45-49.
[11] 田洪金,战荫伟. 基于自适应分块和SSIM的运动目标检测 [J]. 计算机科学,2014,41(2):119-122.
TIAN Hongjin,ZHAN Yinwei. Moving object detection based on adaptive image blocking and SSIM [J]. Computer Science,2014,41(2):119-122.
[12] Hasan S,Sen-ching S. Background subtraction for static & moving camera [J]. 2015 IEEE International Conference on Image Processing(S1565-4138),2015,12(12):4530-4534.
Target Detection Method Based on Multi-frame Background Subtractionand Cauchy Model
WANG Kai1,WU Min1,YAO Hui1,YANG Fan1,ZHANG Xiang2
( 1. Research and Development Center, The 2nd Research Institute, Civil Aviation Administration of China, Chengdu 610041, China;2. School of Electronic Engineering, University of Electronic Science and Technology of China, Chengdu 611731, China )
To effectively solve the problem of fast and accurate detection of moving targets in complex surveillance scene, target detection method based on multi-frame background subtraction and Cauchy model is proposed. Firstly, Surendra background model is improved to get clean background image. Then, system judges the current pixel on the absolute differential image belonging to the target areas or background areas by the absolute difference between the current background frame and the real-time video frame. Finally, through the Cauchy distribution model of the pixel, the aim of the moving target detection is realized in complex surveillance scene. The experiment on the vehicle, pedestrian and other object shows that the method can not only suppress the noise and interference of false target, but also can segment foreground target rapidly and accurately.
multi-frame background subtraction; Cauchy model; target detection; Surendra background model; absolute differential image
1003-501X(2016)10-0012-06
TP317.4
A
10.3969/j.issn.1003-501X.2016.10.003
2016-02-21;
2016-05-06
国家自然科学基金资助项目(61139003;61179060;U1433112);国家科研院所技术开发研究专项资金资助(2013EG125056)
王凯(1989-),男(汉族),四川仁寿人。助理工程师,硕士,主要研究工作是图像处理与识别。E-mail:minhang_wangkai@163.com。
猜你喜欢
数学杂志(2022年5期)2022-12-02
汽车工程师(2021年12期)2022-01-17
新世纪智能(数学备考)(2021年5期)2021-07-28
现代电子技术(2021年1期)2021-01-17
当代陕西(2020年14期)2021-01-08
奥秘(创新大赛)(2020年7期)2020-07-27
上海大学学报(自然科学版)(2018年5期)2018-11-02
电脑知识与技术(2018年35期)2018-02-27
自动化学报(2017年11期)2017-04-04
信息安全研究(2015年3期)2015-02-28
