
计及零注入约束的电力系统动态状态估计
2016-10-12 02:10杨韵
广东电力 2016年9期
杨韵
(广东电网有限责任公司电力调度控制中心,广东 广州510600)
计及零注入约束的电力系统动态状态估计
杨韵
(广东电网有限责任公司电力调度控制中心,广东 广州510600)
已有的动态状态估计大多数都没考虑系统的约束条件,状态估计结果无法满足潮流方程。为此,提出计及零注入约束的电力系统动态状态估计模型,并利用投影无迹卡尔曼滤波(projected unscented Kalman filter,PUKF)算法求解。采用无迹变换技术处理非线性方程,避免了线性化误差;采用投影估计法将状态量估计值投影到约束表面,使估计结果严格满足约束条件。以IEEE-30节点系统为算例进行仿真分析,并将计及零注入约束的PUKF算法与不考虑约束的扩展卡尔曼滤波(extended Kalman filter,EKF)和无迹卡尔曼滤波(unscented Kalman filter,UKF)算法进行比较,结果表明基于PUKF的计及零注入约束的动态状态估计较不考虑约束的动态状态估计,具有更好的状态估计、量测滤波、约束满足和不良数据检测性能。
动态状态估计;投影无迹卡尔曼滤波;零注入约束;不良数据检测
随着电网结构的日益复杂,数据采集与监视控制(supervisory control and data acquisition,SCADA)系统等采集装置的量测数据也日益增多,若量测数据与真值之间存在较大误差,将导致能量管理系统(energy management system,EMS)的电网在线控制决策和安全稳定预警不可信,影响电网安全运行。状态估计是辨识和剔除不良数据的重要手段。传统状态估计采用静态方法,仅根据某时刻测量数据估计该时刻的状态量,难以适应电网状态的突变;而动态估计兼有状态估计和预测的功能,不仅能对某一时刻的状态量进行估计,还能根据状态转移方程预测下一个时刻的状态量,对不良数据检测更为有效[1]。
最早的动态状态估计是基于扩展卡尔曼滤波(extended Kalman filter,EKF)[2-4]的。EKF把电力系统看作线性系统,当系统存在不良数据、网络拓扑结构错误、负荷突变等异常情况时精度较差。文献[5]提出考虑非线性的EKF方法,保留函数线性化的二阶项,但只对突变异常情况有改善作用。文献[6]将无迹卡尔曼滤波(unscented Kalman filter,UKF)引入电力系统动态状态估计中。UKF采用无迹变换技术[7],利用一组散点模拟状态量的分布,得到非线性系统高斯随机变量的均值和方差,避免了线性化误差的引入,与EKF法相比有更高的估计精度[8]。
上述电力系统动态状态估计模型都只考虑状态量当前时刻及下一时刻的关系以及状态量与量测量的关系,忽略了系统本身的约束条件,如零注入约束、电气量上下限约束等,因此动态状态估计结果不一定能严格满足系统约束条件。为此,本文设计了一个计及零注入约束的电力系统状态估计模型,并提出基于投影无迹卡尔曼滤波(projected unscented Kalman filter,PUKF)的求解方法,利用无迹变换技术模拟非线性分布来减少线性化误差,并利用估计投影法使动态状态估计结果能更好地满足约束条件。
杨韵,等:计及零注入约束的电力系统动态状态估计
1 计及零注入约束的动态状态估计模型
传统的电力系统动态状态估计模型包含反映状态量当前时刻与下一时刻关系的状态转移方程,以及反映状态量与量测量关系的量测方程[3-4],其表达式为:
(1)
(2)
式中:下标k表示第k时刻,下标k+1表示第k时刻的下一时刻;x为n×1维状态量;F为n×n维非零对角矩阵;G为n×1维非零向量;w为均值为零、协方差矩阵为Q的高斯白噪声;z为m×1维量测向量,包含了节点注入功率、支路功率以及节点电压幅值等;v为量测误差,是均值为零、协方差矩阵为R的高斯白噪声;h(·)为由基尔霍夫定律等基本电路定律所建立的m维量测函数。
上述模型并没有考虑电气量之间的约束条件,如零注入约束等。实际上电力系统有很多零注入节点,如三绕组变压器的中心节点、220 kV及以上电压等级的节点等。零注入节点不与发电机或负荷关联,因此动态状态估计应保证零注入节点的注入功率严格为零,否则其结果将无法满足潮流方程[9]。
对于一个n节点的电力系统,其网络方程为

假设节点i为零注入节点,则
式中Yi为Y的第i行向量。
设系统中有s个零注入节点,则约束方程为
(3)

2 投影无迹卡尔曼滤波
考虑等式约束的卡尔曼滤波算法有伪量测法和投影法[10]。伪量测法将约束看作虚拟量测,这类方法容易实现且计算效率高,但对虚拟量测赋予大权重会引起矩阵病态,导致状态估计发散。投影法通过构造投影因子将估计值投影到约束表面,避免了伪量测法不收敛的问题。PUKF[11]是基于投影法的卡尔曼滤波算法中的一种,该方法在其他领域研究较多,但在电力系统状态估计领域未见报道。
PUKF运用无迹变换处理非线性方程,运用估计投影法处理约束,因此适用于含非线性约束的动态状态估计模型的求解。PUKF包含了状态预测、状态滤波和状态投影。
2.1状态预测
则预测误差协方差矩阵
2.2状态滤波

式中:Kk+1为第k+1时刻n×m维增益矩阵,νk+1为第k+1时刻m×1维新息向量,Hk+1为第k+1时刻量测函数h(·)的雅克比矩阵。
2.3状态投影
假设系统满足一定的线性等式约束方程
(4)
式中:D为s×n维非零矩阵,d为s×1维向量。
(5)
式中W为任意对称正定权重矩阵。
式(5)的解为
其中:

设q为s×1维向量,若系统约束满足非线性方程,即非线性函数
(6)

则式(6)与式(4)等价。
将无迹变换应用到上述非线性方程中,即为PUKF算法。
3 算例分析
3.1仿真描述
以IEEE-30节点系统(如图1所示)为仿真系统,有6个零注入节点。为了模拟系统动态,系统负荷按1%~3%的线性趋势增加,并叠加3%的随机扰动。状态量真值和量测量真值由潮流计算获得,而量测量的真实值通过对量测量真值叠加均值为零、服从高斯分布的随机噪声获得,噪声大小以量测量标准差刻画。SCADA系统功率量测的标准差为2%,电压幅值量测的标准差为1%;相量测量单元(phasor measurement unit,PMU)电压、电流相位量测和幅值量测的标准差分别取0.2%和0.5%[12]。

图1 IEEE-30节点系统
为了更好地评价PUKF算法的性能,以EKF和UKF作为比较。各算法对非线性和约束的处理方法见表1。
表1各算法对非线性和约束的处理方法
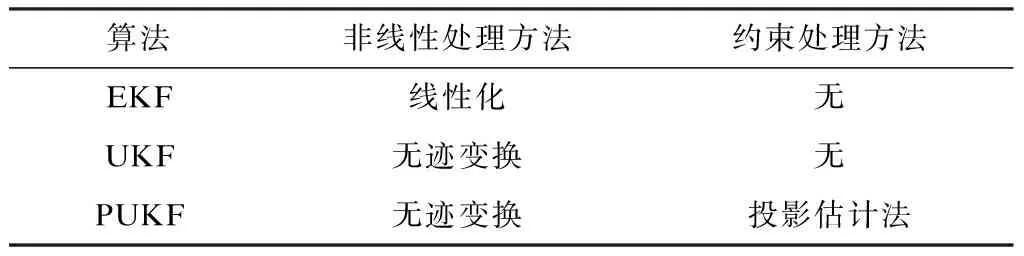
算法非线性处理方法约束处理方法EKF线性化无UKF无迹变换无PUKF无迹变换投影估计法
3.2评价指标
3.2.1状态量误差指标

其中
式中:xest,k,j为第k时刻节点j的状态估计结果,对于本文算法xest,k,j表示状态量的投影值,对于不考虑约束的状态估计算法xest,k,j表示状态量的估计值;x+,k,j为第k时刻节点j的状态量真值;N为仿真总步数,n为电力系统节点总数。ε越小,表示算法状态量估计精度越高。
3.2.2量测滤波性能指标
量测滤波性能指标J表征了算法对量测量的滤波效果。其计算式为
其中

3.2.3约束误差指标
约束误差指标Δe表征了动态状态估计结果对约束条件的满足程度。其计算式为
其中
式中xest,k为第k时刻的状态估计结果。
Δe越小,表示算法估计结果越满足约束条件。
3.2.4正则化加权新息
假设系统中有m个量测量,νi为第i个量测量的新息,Rii为量测误差协方差矩阵R中第i个对角元,则第i个量测量的正则化加权新息
其中:

3.3仿真结果
3.3.1电力系统正常运行
在电力系统正常运行情况下,EKF、UKF和PUKF算法的评价指标值见表2。
表2系统正常运行时各算法性能指标值
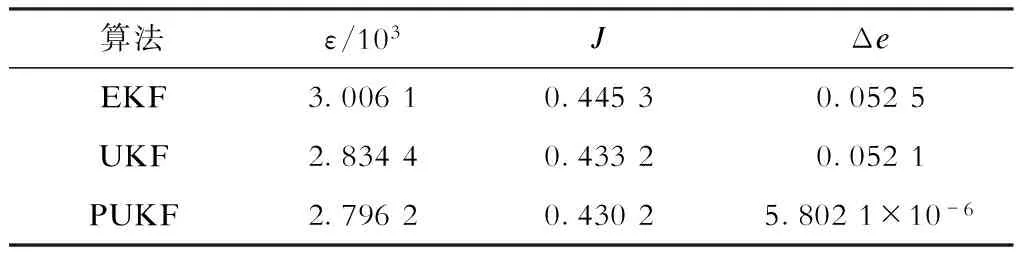
算法ε/103JΔeEKF3.00610.44530.0525UKF2.83440.43320.0521PUKF2.79620.43025.8021×10-6
由表2可见:在系统正常运行情况下,相比于EKF和UKF,PUKF的状态量估计性能、量测滤波性能和约束满足性能均为最优,UKF次之,EKF最差。
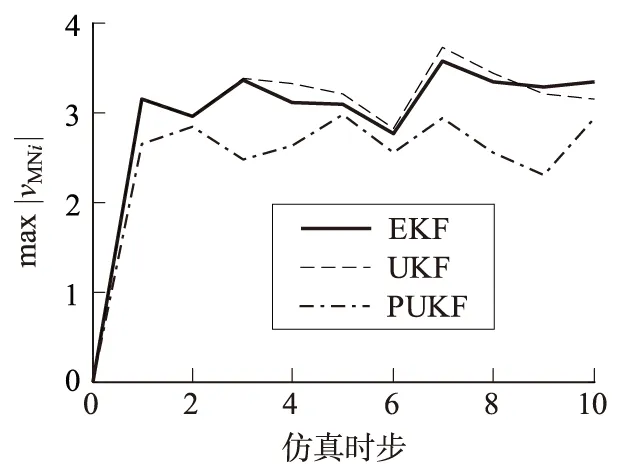
图2 系统正常运行时正则化加权新息随时间的变化
3.3.2系统存在异常
考虑以下3种电力系统异常情景:
a)情景1,系统存在量测坏数据。在时步3,分别在2个有功功率量测和1个无功功率量测上引入幅值为15倍量测标准差的误差。
b)情景2,系统存在拓扑错误。节点5和节点7之间的支路在时步2—5期间断开,但支路开关状态一直显示为闭合,未能反映系统拓扑的变化,则系统拓扑在时步2—6发生2次突变。
c)情景3,系统存在负荷突变。在时步2—5,节点12的负荷被全部切除,即系统在时步2和时步6有2次突变。
表3系统存在异常情况时各算法的性能指标值
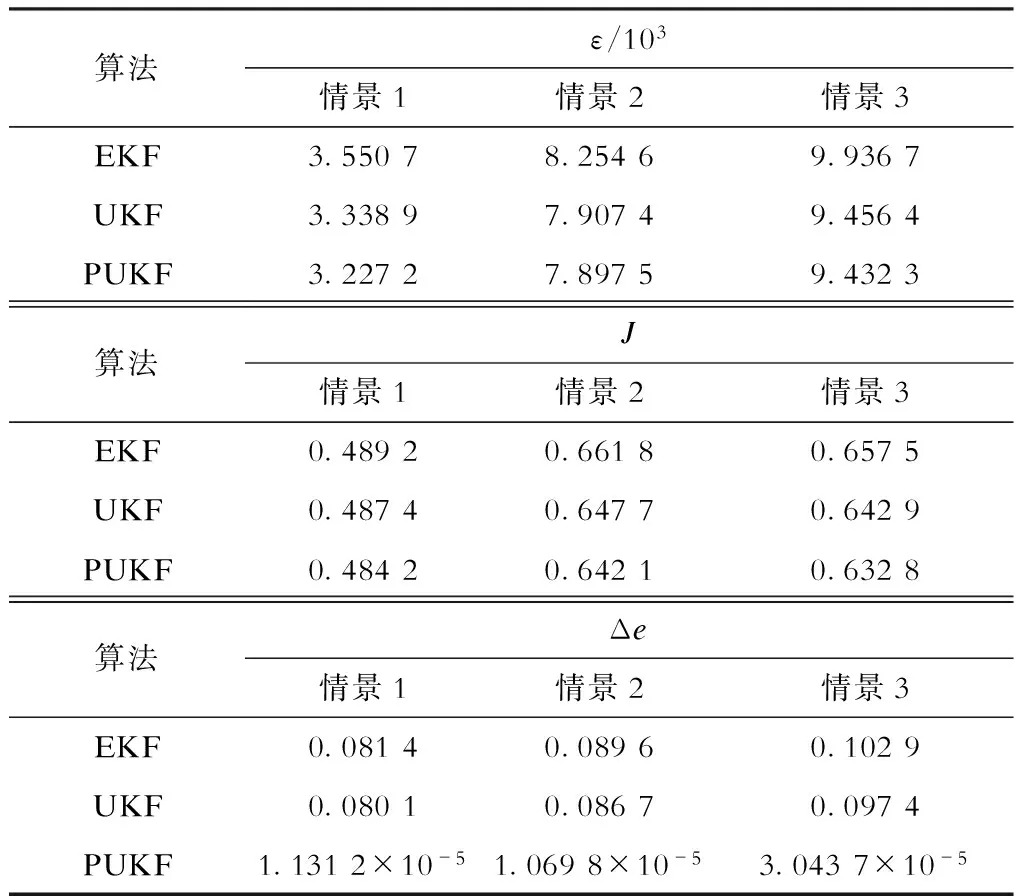
算法ε/103情景1情景2情景3EKF3.55078.25469.9367UKF3.33897.90749.4564PUKF3.22727.89759.4323算法J情景1情景2情景3EKF0.48920.66180.6575UKF0.48740.64770.6429PUKF0.48420.64210.6328算法Δe情景1情景2情景3EKF0.08140.08960.1029UKF0.08010.08670.0974PUKF1.1312×10-51.0698×10-53.0437×10-5

图3 系统存在异常情况时正则化加权新息随时间的变化

4 结论
本文提出了计及零注入约束的电力系统动态状态估计模型,并用PUKF算法求解。PUKF算法利用无迹变换技术处理非线性方程,避免了线性化误差的引入;采用估计投影法处理约束条件,使得估计结果能更好地满足约束条件。仿真结果表明,无论电力系统运行在正常情况还是存在量测坏数据、拓扑错误、负荷突变等异常情况下,与不考虑约束的动态状态估计器EKF和UKF相比,基于PUKF的计及约束的动态状态估计器具有较好的状态量估计、量测滤波和约束满足性能,且检测不良数据的可靠性更高,证明计及零注入约束的动态状态估计有利于提高状态估计精度和滤波质量,并能更有效地辨识不良数据。
[1] 张伯明,王世缨,相年德.电力系统动态状态估计中不正常事件的处理[J]. 中国电机工程学报,1993,13(3):52-58.
ZHANG Boming,WANG Shiying,XIANG Niande.Anomaly Processing in Power System Dynamic State Estimation[J]. Proceedings of the CSEE,1993,13(3):52-58.
[2] DEBS A S,LARSON R.A Dynamic Estimator for Tracking the State of a Power System[J]. IEEE Trans on Power Apparatus and Systems,1970(7):1670-1678.
[3] LEITE DA SILVA A M,DO COUTTO FILHO M B,DE QUEIROZ J F.State Forecasting in Electric Power Systems[J].IEE Proceedings-Generation,Transmission and Distribution,1983,130(5):237-244.
[4] LEITE DA SILVA A M,DO COUTTO FILHO M B,CANTERA J M C.An Efficient Dynamic State Estimation Algorithm Including Bad Data Processing[J]. IEEE Trans on Power Systems,1987,2(4):1050-1058.
[5] MANDAL J K,SINHA A K,ROY L.Incorporating Nonlinearities of Measurement Function in Power System Dynamic State Estimation[J]. IEE Proceedings-Generation,Transmission and Distribution,1995,142(3):289-296.
[6] 卫志农,孙国强,庞博.无迹卡尔曼滤波及其平方根形式在电力系统动态状态估计中的应用[J]. 中国电机工程学报,2011,31(16):74-80.
WEI Zhinong,SUN Guoqiang,PANG Bo.Application of UKF and SRUKF to Power System Dynamic State Estimation[J]. Proceedings of the CSEE,2011,31(16):74-80.
[7] JULIER S J,UHLMANN J K.Unscented Filtering and Nonlinear Estimation[J]. Proceedings of the IEEE,2004,92(3):401-422.
[8] 李大路,李蕊,孙元章.混合量测下基于 UKF 的电力系统动态状态估计[J]. 电力系统自动化,2010,34(17):17-21.
LI Dalu,LI Rui,SUN Yuanzhang.Power System Dynamic State Estimation with Mixed Measurements Based on UKF[J]. Automation of Electric Power System,2010,34(17):17-21.
[9] 郭烨,张伯明,吴文传,等.直角坐标下含零注入约束的电力系统状态估计修正牛顿法[J]. 中国电机工程学报,2012,32(19):96-100.
GUO Ye,ZHANG Boming,WU Wenchuan,et al.Power System State Estimation Solution with Zero Injection Constraints Using Modified Newton Method[J]. Proceedings of the CSEE,2012,32(19):96-100.
[10] JULIER S J,LAVIOLA J J.On Kalman Filtering with Nonlinear Equality Constraints[J]. IEEE Trans. on Signal Processing,2007,55(6):2774-2784.
[11] TEIXEIRA B O S,CHANDRASEKAR J,TORRES L A B,et al.State Estimation for Linear and Non-linear Equality-constrained Systems[J]. International Journal of Control,2009,82(5):918-936.
[12] IEEE Standard for Synchro Phasors for Power Systems:IEEE Std C37.118:2005[S].
(编辑李丽娟)
Dynamic State Estimation on Power System with Zero Injection Constraints
YANG Yun
(Electric Power Dispatching Control Center of Guangdong Power Grid Co., Ltd., Guangzhou, Guangdong 510600, China)
Most of the existing dynamic state estimation methods do not consider constraint conditions for the system and the estimation results can not satisfy flow equations. Therefore, this paper proposes a dynamic state estimation model for power system with zero injection constraints and uses projected unscented Kalman filter (PUKF) algorithm for solutions. Unscented transformation technology is used for processing nonlinear equations and is able to avoid linear errors. Projected estimation method is used for projecting estimated values of state vectors on the constraint surface and ensure estimated results strictly satisfy constraint conditions. IEEE-30 node system is used for simulation analysis, PUKF algorithm considering zero injection constraints, extended Kalman filter (EKF) algorithm and unscented Kalman filter (UKF) algorithm are compared as well. Results indicate that compared with dynamic state estimation without regard to constraints, PUKF-based dynamic state estimation considering zero injection constraints has better performance of state estimation, measurement filter, constraint satisfaction and bad data detection.
dynamic state estimation; projected unscented Kalman filter; zero injection constraint; bad data detection
2016-03-27
2016-05-27
10.3969/j.issn.1007-290X.2016.09.015
TM744
A
1007-290X(2016)09-0073-05
杨韵(1989),女,广东广州人。助理工程师,工学硕士,主要研究方向为电力系统状态估计。
猜你喜欢
北京航空航天大学学报(2022年8期)2022-08-31
鸭绿江(2021年26期)2021-11-11
领导文萃(2021年5期)2021-04-02
数学物理学报(2021年1期)2021-03-29
新疆大学学报(自然科学版)(中英文)(2020年2期)2020-07-25
学生天地·小学低年级版(2019年5期)2019-06-05
学生天地(2019年15期)2019-05-05
电子制作(2019年23期)2019-02-23
当代教育(2018年4期)2018-01-23
北京航空航天大学学报(2017年9期)2017-12-18
